低速紧急制动功能防误触方法、装置及设备与流程
本申请涉及辅助驾驶,具体涉及一种低速紧急制动功能防误触方法、装置及设备。
背景技术:
1、低速紧急制动功能是一种辅助驾驶功能,在倒车过程中,对驾驶员和车辆的安全起着非常重要的作用。
2、相关技术中,低速紧急制动功能工作的车速区间为2-10km/h,当车速超过10km/h时,低速紧急制动功能无法激活。在驾驶员倒车过程中,车辆控制系统通过布置在车辆尾部的摄像头采集车辆外部环境的图像数据,采用超声波探测图像数据中车辆左右两侧各障碍物与车辆之间的横向距离,在接收到超声波探测的横向距离后,将横向距离和预设数值进行比较,在横向距离小于等于预设数值时,判断障碍物在车辆倒车轨迹线内,存在碰撞风险,触发低速紧急制动功能,以保证驾驶员和车辆的安全。
3、但是,在转弯倒车时,因为超声波对于横向距离的感知存在误差,如超声波探测的横向距离为30cm,而实际的横向距离为40cm,预设数值为35cm,此时实际的横向距离大于预设数值,正常应当判断为不存在碰撞风险,不触发低速紧急制动功能;然而超声波探测的横向距离小于预设数值,导致误判为存在碰撞风险,而直接触发紧急制动功能,引起驾驶员抱怨。
技术实现思路
1、本申请提供一种低速紧急制动功能防误触方法、装置及设备,可以解决现有技术中存在的在转弯倒车时,因为超声波对于横向距离的感知存在误差,导致车辆控制系统误判为存在碰撞风险,而直接触发紧急制动功能,引起驾驶员抱怨技术问题。
2、第一方面,本申请实施例提供一种低速紧急制动功能防误触方法,所述低速紧急制动功能防误触方法包括:
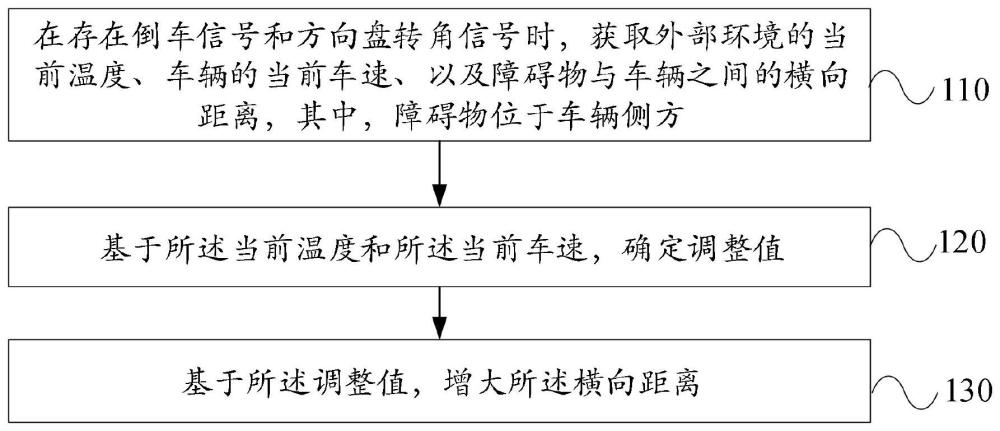
3、在存在倒车信号和方向盘转角信号时,获取外部环境的当前温度、车辆的当前车速、以及障碍物与车辆之间的横向距离,其中,障碍物位于车辆侧方;
4、基于所述当前温度和所述当前车速,确定调整值;
5、基于所述调整值,增大所述横向距离。
6、在一些实施例中,所述在存在倒车信号和方向盘转角信号时,获取外部环境的当前温度、车辆的当前车速、以及障碍物与车辆之间的横向距离,包括:
7、在存在倒车信号和方向盘转角信号时,获取车辆侧方外部环境的图像数据;
8、基于障碍物类别模型确定所述图像数据中各障碍物的障碍物类型;
9、当各障碍物的障碍物类型均为无生命类型时,获取外部环境的当前温度、车辆的当前车速、以及障碍物与车辆之间的横向距离。
10、在一些实施例中,所述基于所述当前温度和所述当前车速,确定调整值,包括:
11、基于所述当前温度和所述当前车速,确定车辆宽度缩小值;
12、以所述车辆宽度缩小值的一半作为所述调整值。
13、在一些实施例中,所述基于所述当前温度和所述当前车速,确定车辆宽度缩小值,包括:
14、基于所述当前温度,确定车辆宽度第一缩小值;
15、基于所述当前车速,确定车辆宽度第二缩小值;
16、基于所述车辆宽度第一缩小值和所述车辆宽度第二缩小值,确定车辆宽度缩小值。
17、在一些实施例中,所述基于所述当前温度,确定车辆宽度第一缩小值,包括:
18、基于所述当前温度,从预先构建的温度和车辆宽度缩小值的对应关系中,确定车辆宽度第一缩小值。
19、在一些实施例中,所述基于所述当前车速,确定车辆宽度第二缩小值,包括:
20、基于所述当前车速,从预先构建的车速和车辆宽度缩小值的对应关系中,确定车辆宽度第二缩小值。
21、在一些实施例中,基于所述车辆宽度第一缩小值和所述车辆宽度第二缩小值,确定车辆宽度缩小值,包括:
22、从所述车辆宽度第一缩小值和所述车辆宽度第二缩小值中,确定数值较大的缩小值;
23、将所述数值较大的缩小值,确定为车辆宽度缩小值。
24、第二方面,本申请实施例提供了一种低速紧急制动功能防误触装置,所述低速紧急制动功能防误触装置包括:
25、获取模块,用于在存在倒车信号和方向盘转角信号时,获取外部环境的当前温度、车辆的当前车速、以及障碍物与车辆之间的横向距离,其中,障碍物位于车辆侧方;
26、确定模块,用于基于所述当前温度和所述当前车速,确定调整值;
27、增大模块,用于基于所述调整值,增大所述横向距离。
28、第三方面,本申请实施例提供了一种低速紧急制动功能防误触设备,所述低速紧急制动功能防误触设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的低速紧急制动功能防误触程序,其中所述低速紧急制动功能防误触程序被所述处理器执行时,实现如第一方面中任一项所述的低速紧急制动功能防误触方法的步骤。
29、第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有低速紧急制动功能防误触程序,其中所述低速紧急制动功能防误触程序被处理器执行时,实现如第一方面中任一项所述的低速紧急制动功能防误触方法的步骤。
30、本申请实施例提供的技术方案带来的有益效果包括:
31、在存在倒车信号和方向盘转角信号时,通过获取外部环境的当前温度、车辆的当前车速、以及障碍物与车辆之间的横向距离,其中,障碍物位于车辆侧方;进一步基于当前温度和当前车速,确定调整值;然后基于调整值,增大横向距离,可在转弯倒车时,弥补超声波对于横向距离的感知存在的误差,实现防止误触发紧急制动功能,减少驾驶员抱怨。
技术特征:
1.一种低速紧急制动功能防误触方法,其特征在于,所述低速紧急制动功能防误触方法包括:
2.如权利要求1所述的低速紧急制动功能防误触方法,其特征在于,所述在存在倒车信号和方向盘转角信号时,获取外部环境的当前温度、车辆的当前车速、以及障碍物与车辆之间的横向距离,包括:
3.如权利要求1所述的低速紧急制动功能防误触方法,其特征在于,所述基于所述当前温度和所述当前车速,确定调整值,包括:
4.如权利要求3所述的低速紧急制动功能防误触方法,其特征在于,所述基于所述当前温度和所述当前车速,确定车辆宽度缩小值,包括:
5.如权利要求4所述的低速紧急制动功能防误触方法,其特征在于,所述基于所述当前温度,确定车辆宽度第一缩小值,包括:
6.如权利要求4所述的低速紧急制动功能防误触方法,其特征在于,所述基于所述当前车速,确定车辆宽度第二缩小值,包括:
7.如权利要求4所述的低速紧急制动功能防误触方法,其特征在于,基于所述车辆宽度第一缩小值和所述车辆宽度第二缩小值,确定车辆宽度缩小值,包括:
8.一种低速紧急制动功能防误触装置,其特征在于,所述低速紧急制动功能防误触装置包括:
9.一种低速紧急制动功能防误触设备,其特征在于,所述低速紧急制动功能防误触设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的低速紧急制动功能防误触程序,其中所述低速紧急制动功能防误触程序被所述处理器执行时,实现如权利要求1至7中任一项所述的低速紧急制动功能防误触方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有低速紧急制动功能防误触程序,其中所述低速紧急制动功能防误触程序被处理器执行时,实现如权利要求1至7中任一项所述的低速紧急制动功能防误触方法的步骤。
技术总结
一种低速紧急制动功能防误触方法、装置及设备,属于辅助驾驶技术领域。其中,方法包括:在存在倒车信号和方向盘转角信号时,获取外部环境的当前温度、车辆的当前车速、以及障碍物与车辆之间的横向距离,其中,障碍物位于车辆侧方;基于所述当前温度和所述当前车速,确定调整值;基于所述调整值,增大所述横向距离。本申请可在转弯倒车时,弥补超声波对于横向距离的感知存在的误差,实现防止误触发紧急制动功能,减少驾驶员抱怨。
技术研发人员:张程锦,彭子尧,雷小顺,邱太超,沈忱
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!