一种汽车电子稳定控制系统以及车辆的制作方法
本发明涉及车辆控制,具体而言,涉及一种汽车电子稳定控制系统以及车辆。
背景技术:
1、通常,esc(electronic stability control system,汽车电子稳定控制系统)通过控制横摆角速度和质心侧偏角来使汽车的实际行驶轨迹回到驾驶员期望行驶轨迹上。而横摆角速度和质心侧偏角是通过惯性测量单元直接或间接测量的。
2、目前行业内使用单个惯性测量单元芯片进行横摆角速度和加速度的测量。而单个惯性测量单元芯片在出现单点失效时,汽车电子稳定控制系统就会基于错误的速度信息对车辆轨迹进行控制,进一步会导致车辆发生危险。
3、而且单个惯性测量单元芯片所输出的速度信息仅能实现asil-c或者asil-b的技术安全需求,例如技术安全需求为:输出加速度信号误差应当低于某个限值,违反此技术安全需求的单点失效度量高于90%低于97%能实现asil-b所要求的标准,违反此技术安全需求的单点失效度量高于97%低于99%能实现asil-c所要求的标准,而使用单个芯片时违反此技术安全需求的单点失效度量高于90%低于99%,因此,仅能实现asil-c所要求的标准或者asil-b所要求的标准。
4、由于仅能实现asil-c所要求的标准或者asil-b所要求的标准,从而可能造成某些安全标准低于车辆系统的需求,例如:制动力过度或不足,从而造成车辆发生危险。
技术实现思路
1、本发明提供了一种汽车电子稳定控制系统以及车辆,减少了车辆发生危险的概率。具体的技术方案如下。
2、第一方面,本发明提供了一种汽车电子稳定控制系统,所述汽车电子稳定控制系统,包括:
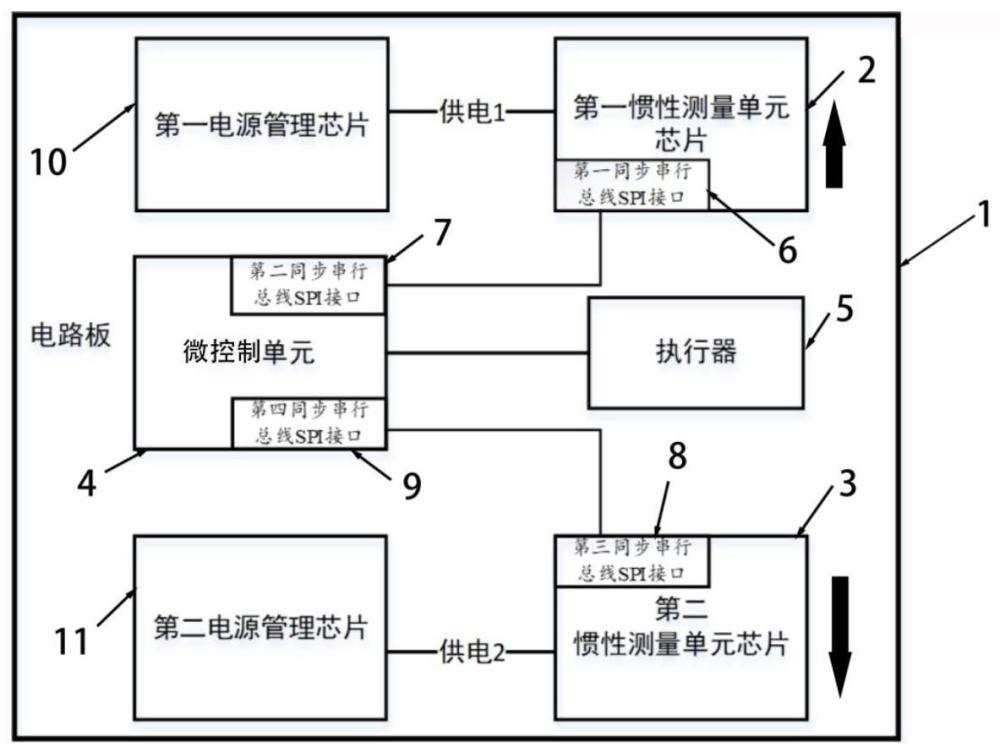
3、电路板、第一惯性测量单元芯片、第二惯性测量单元芯片、微控制单元和执行器;
4、所述第一惯性测量单元芯片、所述第二惯性测量单元芯片、所述微控制单元和所述执行器均固定安装于所述电路板,且所述第一惯性测量单元芯片和所述第二惯性测量单元芯片的x轴的正方向是相反的,所述第一惯性测量单元芯片、所述第二惯性测量单元芯片和所述执行器均与所述微控制单元通信连接;
5、所述第一惯性测量单元芯片实时测量得到汽车的第一速度信息并发送至所述微控制单元,其中,所述第一速度信息包括第一横摆角速度和第一加速度;
6、所述第二惯性测量单元芯片实时测量得到汽车的第二速度信息并发送至所述微控制单元,其中,所述第二速度信息包括第二横摆角速度和第二加速度;
7、所述微控制单元检测所述第一速度信息与所述第二速度信息是否相同,如果否,发送车辆进入安全状态指令至所述执行器;
8、所述执行器接收所述车辆进入安全状态指令,执行所述车辆进入安全状态指令对应的动作。
9、可选的,所述微控制单元检测所述第一横摆角速度和所述第二横摆角速度是否相同,以及,所述第一加速度和所述第二加速度是否相同;
10、如果不是均相同,发送车辆进入安全状态指令至所述执行器。
11、可选的,所述微控制单元检测所述第一速度信息与所述第二速度信息相同,发送车辆正常行驶指令至所述执行器;
12、所述执行器接收所述车辆正常行驶指令,执行所述车辆正常行驶指令对应的动作。
13、可选的,所述微控制单元检测所述第一横摆角速度和所述第二横摆角速度相同,以及,所述第一加速度和所述第二加速度相同,发送车辆正常行驶指令至所述执行器。
14、可选的,所述汽车电子稳定控制系统还包括:
15、第一电源管理芯片和第二电源管理芯片;
16、所述第一电源管理芯片与所述第一惯性测量单元芯片电连接,所述第二电源管理芯片与所述第二惯性测量单元芯片电连接。
17、可选的,所述第一惯性测量单元芯片的第一同步串行总线spi接口与所述微控制单元的第二同步串行总线spi接口连接,所述第二惯性测量单元芯片的第三同步串行总线spi接口与所述微控制单元的第四同步串行总线spi接口连接。
18、可选的,所述第一惯性测量单元芯片和所述第二惯性测量单元芯片位于同一直线上。
19、可选的,所述第一惯性测量单元芯片和所述第二惯性测量单元芯片位于同一水平线上或者位于同一垂直线上。
20、可选的,所述第一惯性测量单元芯片和所述第二惯性测量单元芯片不位于同一直线上。
21、第二方面,本发明提供一种车辆,包括车身和汽车电子稳定控制系统,所述汽车电子稳定控制系统安装于所述车身,所述汽车电子稳定控制系统为上述第一方面中的任一项所述的汽车电子稳定控制系统。
22、由上述内容可知,本发明实施例提供的汽车电子稳定控制系统以及车辆,通过设置第一惯性测量单元芯片和第二惯性测量单元芯片的x轴的正方向是相反的方式,来避免两者之间由于安装造成的共因失效的情况的发生,进一步避免由于共因失效造成的汽车电子稳定控制系统的故障的发生,然后通过微控制单元检测第一速度信息与第二速度信息不相同时,发送车辆进入安全状态指令至执行器,从而让车辆执行车辆进入安全状态指令对应的动作,而不是基于错误的速度信息对车辆轨迹进行控制,减少了车辆发生危险的概率。以及通过设置两个惯性测量单元芯片的方式,使得检测出信号出错的概率由0提高到0.99,从而将单点失效度量提高到大于99%,从而可以实现asil-d所要求的标准,进一步减少了车辆发生危险的概率。
23、本发明实施例的创新点包括:
24、1、通过设置第一惯性测量单元芯片和第二惯性测量单元芯片的x轴的正方向是相反的方式,来避免两者之间由于安装造成的共因失效的情况的发生,进一步避免由于共因失效造成的汽车电子稳定控制系统的故障的发生,然后通过微控制单元检测第一速度信息与第二速度信息不相同时,发送车辆进入安全状态指令至执行器,从而让车辆执行车辆进入安全状态指令对应的动作,而不是基于错误的速度信息对车辆轨迹进行控制,减少了车辆发生危险的概率。以及通过设置两个惯性测量单元芯片的方式,使得检测出信号出错的概率由0提高到0.99,从而将单点失效度量提高到大于99%,从而可以实现asil-d所要求的标准,进一步减少了车辆发生危险的概率。
25、2、通过设置第一惯性测量单元芯片和第二惯性测量单元芯片的x轴的正方向是相反的方式,来避免两者之间由于安装造成的共因失效的情况的发生,进一步避免由于共因失效造成的汽车电子稳定控制系统的故障的发生。
26、3、第一惯性测量单元芯片通过由第一同步串行总线spi接口与第二同步串行总线spi接口之间形成的独立的spi通道进行通讯,而第二惯性测量单元芯片通过由第三同步串行总线spi接口与第四同步串行总线spi接口之间形成的独立的spi通道进行通讯,保证在单个的spi通道受到干扰时,另一个spi通道仍然可以正常工作,避免由于通讯干扰造成的汽车电子稳定控制系统的故障的发生,从而保证车辆依然可以正常使用汽车电子稳定控制系统的功能,避免发生危险。
27、4、通过检测横摆角速度和加速度是否均相同的方式,来确定第一惯性测量单元芯片和第二惯性测量单元芯片中的一个是否出现了问题。
28、5、通过微控制单元检测第一速度信息与第二速度信息相同时,发送车辆正常行驶指令至执行器,从而让车辆执行车辆正常行驶指令对应的动作,保证车辆的正常行驶。
29、6、通过第一电源管理芯片给第一惯性测量单元芯片进行供电,通过第二电源管理芯片给第二惯性测量单元芯片进行供电,保证了供电的独立性,当第一惯性测量单元芯片和第二惯性测量单元芯片中的任意一个内部发生电源故障造成的短路后,另一个仍然可以被正常供电,从而保证汽车电子稳定控制系统的正常工作。
30、7、车辆安装有汽车电子稳定控制系统,汽车电子稳定控制系统通过设置第一惯性测量单元芯片和第二惯性测量单元芯片的x轴的正方向是相反的方式,来避免两者之间由于安装造成的共因失效的情况的发生,进一步避免由于共因失效造成的汽车电子稳定控制系统的故障的发生,然后通过微控制单元检测第一速度信息与第二速度信息不相同时,发送车辆进入安全状态指令至执行器,从而让车辆执行车辆进入安全状态指令对应的动作,而不是基于错误的速度信息对车辆轨迹进行控制,减少了车辆发生危险的概率。以及通过设置两个惯性测量单元芯片的方式,使得检测出信号出错的概率由0提高到0.99,从而将单点失效度量提高到大于99%,从而可以实现asil-d所要求的标准,进一步减少了车辆发生危险的概率。
31、当然,实施本发明的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!