AI视觉感知的自动车距保持辅助系统的制作方法
本技术涉及车辆自动驾驶领域,尤其是涉及一种ai视觉感知的自动车距保持辅助系统。
背景技术:
1、自动车距保持系统,作为自动驾驶技术的关键组成部分,目前主要依赖于两种类型的传感器:雷达(包括毫米波雷达)和光学摄像头。这些系统的核心目标是在各种道路条件下保持车辆与前车的安全距离。
2、雷达传感器通过发射电磁波并捕捉其反射波来检测前方对象的距离和速度,它们对恶劣天气条件具有相对较强的抗干扰能力。
3、雷达系统虽然在恶劣天气条件下表现较好,但可能在城市环境中由于多路径效应(即电磁波的多重反射)导致误读。而摄像头系统在夜间或直射阳光下的性能降低,特别是在对比度低或光线不均匀的情况下。
4、这些系统利用摄像头捕获前方的视觉图像,通过图像处理算法识别车辆、行人、道路标志和车道线等。虽然摄像头在提供视觉细节方面优于雷达,但在低光照或直射阳光条件下性能可能下降。
技术实现思路
1、为了能够较好地自动保持驾驶车辆与前车的车距,本技术提供了一种ai视觉感知的自动车距保持辅助系统。
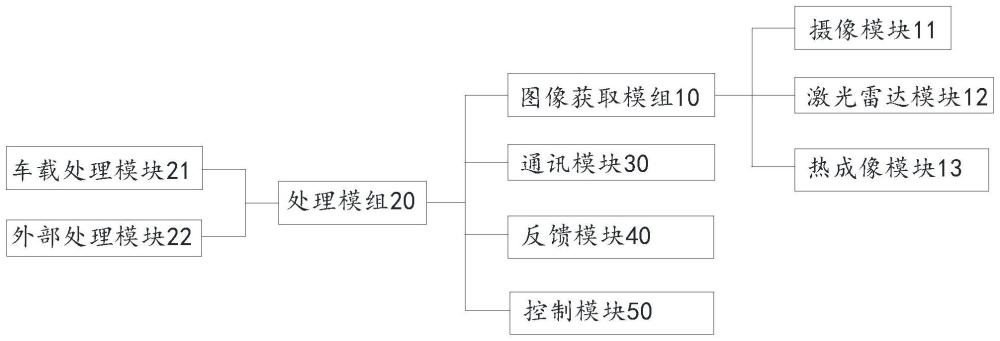
2、所述ai视觉感知的自动车距保持辅助系统包括:
3、图像获取模组,所述图像获取模组供获取道路多模态图像信息;
4、处理模组,供处理各种数据;
5、通讯模块,供进行数据通讯;
6、反馈模块,供向车辆驾驶员发传递反馈信息;
7、控制模块,供控制车辆的车速;
8、其中,所述图像获取模组、所述通讯模块、所述反馈模块和所述控制模块分别被可控地链接于所述处理模块;
9、其中,所述图像获取模组包括摄像模块、激光雷达模块和热成像模块,所述摄像模块、激光雷达模块和热成像模块分别被可通讯地连接于所述处理模组,其中,所述摄像模块供获取道路图像数据,所述激光雷达模块供获取道路云点数据,所述热成像模块供获取道路热成像数据;
10、其中,所述处理模组包括车载处理模块和外部处理模块,所述外部处理模块通过所述通讯模块可通讯地连接于所述车载处理模块。
11、通过采用上述技术方案,所述ai视觉感知的自动车距保持辅助系统可以综合道路图像数据、道路点云数据和道路热成像数据对驾驶车辆的前方车辆的车距进行识别,进而可以提高车距识别的准确度,通过所述外部处理模块也可以提高识别效率。
12、可选的,所述ai视觉感知的自动车距保持辅助系统进一步包括车距保持策略,所述车距保持策略包括以下步骤:
13、a1,通过所述图像获取模组获取道路多模态图像信息,其中,道路多模态图像信息包括道路图像数据、道路云点数据和道路热成像数据;
14、a2,根据道路图像数据通过所述处理模块以预设的车道识别算法生成车道信息;
15、a3,根据道路多模态图像信息通过所述处理模块以预设的车距识别算法生成车距信息;
16、a4,根据车道信息和车距信息确定前方车辆车距;
17、a5,获取自身车速数据;
18、a6,根据自身车速数据和道路图像数据以预设的安全制动距离算法计算安全制动距离;
19、a7,根据前方车辆车距、安全制动距离和预设的预留距离以预设的安全距离算法计算安全距离;
20、a8,通过所述反馈模块向车辆驾驶员发送预设的车速调节告知信息;
21、a9,根据安全距离通过所述控制模块调节当前车辆的车速。
22、通过采用上述技术方案,所述ai视觉感知的自动车距保持辅助系统可以根据道路图像数据识别出车道信息,并根据车道信息和通过车距识别算法生成车距信息确定驾驶车辆所处车道的前方车辆车距,进而根据前方车辆车距对当前车辆进行车距调节,使当前车辆和前方车辆保持在一个较安全的距离。
23、可选的,所述车距识别算法包括以下步骤:
24、b1,通过所述摄像模块获取道路图像数据,并根据道路图像数据以预设的特征提取算法生成道路图像特征数据;
25、b2,通过所述激光雷达模块获取道路点云数据,根据道路点云数据以预设的点云转换算法生成道路深度图数据,并根据道路深度图数据以特征提取算法生成道路深度特征数据;
26、b3,通过所述热成像模块获取道路热成像数据,并根据道路热成像数据以特征提取算法生成道路热成像特征数据;
27、b4,根据道路图像特征数据、道路深度特征数据和道路热成像特征数据以预设的特征融合算法生成道路融合特征数据;
28、b5,根据道路融合特征数据以预训练的车距识别模型生成车距信息。
29、通过采用上述技术方案,通过以上步骤,所述车距识别算法可以通过特征提取算法和特征融合算法减少需要进行识别处理的数据量,可提高对道路车辆的车距识别的效率,同时通过多维度的数据保留重要特征数据,又保证了车距识别的准确度。
30、可选的,所述ai视觉感知的自动车距保持辅助系统进一步包括以下步骤用于训练车距识别模型:
31、c1,于预设的历史数据库获取历史道路多模态图像信息,并于历史道路多模态图像信息中获取相匹配的历史图像数据、历史点云数据、历史热成像数据和历史车距数据;
32、c2,根据历史图像数据以特征提取算法生成历史图像特征数据;
33、c3,根据历史点云数据以点云转换算法生成历史深度图数据,并根据历史深度图数据以特征提取算法生成历史深度特征数据;
34、c4,根据历史热成像数据以特征提取算法生成历史热成像特征数据;
35、c5,根据历史图像特征数据、历史深度特征数据、历史热成像特征数据以特征融合算法生成历史融合特征信息;
36、c6,根据历史融合特征信息和历史车距数据生成车距识别数据集;
37、c7,根据车距识别数据集对预设的深度学习模型进行训练以生成车距识别模型。
38、通过采用上述技术方案,所述ai视觉感知的自动车距保持辅助系统可以根据历史数据进行特提取,以减少数据量,并对多模态的特征进行融合,进一步减少数据量并保证必要特征信息,最后根据历史数据的特征数据训练生成车距识别模型,可提高训练效率。
39、可选的,所述处理模块包括分部识别算法用于对道路多模态图像信息进行分块处理,所述分部识别算法包括以下步骤:
40、d1,根据道路图像数据以及车道信息以预设的分割算法生成主要区域图像数据和次要区域图像数据;
41、d2,根据道路深度图数据以及车道信息以分割算法生成主要区域深度图数据和次要区域深度图数据;
42、d3,根据道路热成像数据以及车道信息以分割算法生成主要区域热成像数据和次要区域热成像数据;
43、d4,所述车载处理模块分别根据主要区域图像数据、主要区域深度图数据和主要区域热成像数据以特征提取算法生成主要区域图像特征数据、主要区域深度特征数据和主要区域热成像特征数据;
44、d5,所述车载处理模块根据主要区域图像特征数据、主要区域深度特征数据和主要区域热成像特征数据以特征融合算法生成主要区域融合特征数据;
45、d6,所述车载处理模块根据主要区域融合特征数据以车距识别模型生成主要区域车距信息;
46、d7,所述外部处理模块分别根据次要区域图像数据、次要区域深度图数据和次要区域热成像数据以特征提取算法生成次要区域图像特征数据、次要区域深度特征数据和次要区域热成像特征数据;
47、d8,所述外部处理模块根据次要区域图像特征数据、次要区域深度特征数据和次要区域热成像特征数据以特征融合算法生成次要区域融合特征数据;
48、d9,所述外部处理模块根据次要区域融合特征数据以车距识别模型生成次要区域车距信息;
49、d10,根据主要区域车距信息和次要区域车距信息生成车距信息。。
50、通过采用上述技术方案,所述ai视觉感知的自动车距保持辅助系统能够将道路多模态数据进块处理,通过将部分次要区域的道路数据交由所述移动处理模块处理22,可以减少所述车载处理模块21需要处理的数据量,进而提高其对道路主要区域的车距识别效率。
51、可选的,所述安全制动距离算法包括以下步骤:
52、e1,根据主要区域图像数据和车道信息确定当前车道图像数据;
53、e2,根据当前车道图像数据以预训练的道路类型识别模型生成车道材质信息和车道干湿信息;
54、e3,根据车道材质信息和车道干湿信息于预设的摩擦系数表比对获取预估车道摩擦系数;
55、e4,根据主要区域热成像数据和车道信息确定当前车道热成像数据;
56、e5,根据当前车道热成像数据以预设的道路温度识别算法生成预估车道温度;
57、e6,根据预估车道温度于预设的车道温度调整系数表获取对应的车道温度调整系数;
58、e7,根据当前车速、预估车道摩擦系数和车道温度调整系数以预设的制动距离算法计算安全制动距离;
59、其中,制动距离算法为:
60、
61、其中,d为安全制动距离,v为当前车速,μ为预估车道摩擦系数,t为车道温度调整系数,g为重力加速度。
62、通过采用上述技术方案,所述ai视觉感知的自动车距保持辅助系统可以对当前车辆所在车道的材质、干湿度和温度进行识别和估算,进而根据这些信息估算出安全制动距离。
63、可选的,所述ai视觉感知的自动车距保持辅助系统进一步包括道路损坏监测策略,所述道路损坏监测策略包括以下步骤:
64、f1,根据主要区域热成像数据以预设的路面破损识别算法确定主要区域坑洞信息;
65、f2,若主要区域坑洞信息不为空值,则根据车道信息和主要区域坑洞信息以预设的警示内容生成算法生成坑洞警示内容;
66、f3,通过所述反馈模块播报坑洞警示内容;
67、f4,根据车道信息和主要区域坑洞信息确定当前车道坑洞信息;
68、f5,若当前车道坑洞信息不为空值,则根据预设的规避调节车速通过所述控制模块调节当前车辆的车速。。
69、通过采用上述技术方案,所述ai视觉感知的自动车距保持辅助系统可以监测道路的坑洞情况,并在发现坑洞出现在当前车道时,对车速进行适当调降,使车辆驾驶员可以及时规避道路坑洞。
70、可选的,所述ai视觉感知的自动车距保持辅助系统进一步包括道路异物监测策略,所述道路异物监测策略包括以下步骤:
71、g1,根据主要区域图像信息以预设的路面异物识别算法确定主要区域异物信息;
72、g2,若主要区域异物信息部位不为空值,则根据车道信息和主要区域异物信息以警示内容生成算法生成异物警示内容;
73、g3,通过所述反馈模块播报异物警示内容;
74、g4,根据车道信息和主要区域异物信息确定当前车道异物信息;
75、g5,根据车道信息和主要区域深度图数据确定当前车道深度图数据;
76、g6,根据当前车道异物信息和当前车道深度图数据以预设的异物尺寸算法生成异物尺寸信息;
77、g7,若异物尺寸信息大于预设的异物尺寸阈值,则根据规避调节车速通过所述控制模块调节当前车辆的车速。
78、通过采用上述技术方案,所述ai视觉感知的自动车距保持辅助系统可以监测道路的异物情况,并在发现异物出现在当前车道时,进一步对异物的尺寸进行判断,并根据异物尺寸对车速进行适当调降,使车辆驾驶员可以及时规避异物。
79、可选的,所述点云转换算法为:
80、定义点云数据中的每个点为p(x,y,z),
81、则对于深度图数据中每个像素点(u,v),其深度值d为:
82、
83、其中,d(u,v)为深度图数据上坐标为(u,v)的像素点的深度值;
84、进一步地,
85、
86、
87、其中,fx和fy分别为x和y方向上的焦距,cx和cy为深度图数据的中心坐标点;
88、进一步地,
89、
90、
91、cx=w/2;
92、cy=h/2;
93、其中,w为深度图数据的预设像素宽度,h为深度图数据的预设像素高度,fovx和fovy为激光雷达的水平和垂直方向的视场角度。
94、通过采用上述技术方案,可以将激光雷达获取的点云数据较好地转换为深度图数据。
95、综上所述,本技术包括以下至少一种有益技术效果:
96、1.所述ai视觉感知的自动车距保持辅助系统可以综合道路图像数据、道路点云数据和道路热成像数据对驾驶车辆的前方车辆的车距进行识别,进而可以提高车距识别的准确度,通过所述外部处理模块也可以提高识别效率;
97、2.所述ai视觉感知的自动车距保持辅助系统可以根据道路图像数据识别出车道信息,并根据车道信息和通过车距识别算法生成车距信息确定驾驶车辆所处车道的前方车辆车距,进而根据前方车辆车距对当前车辆进行车距调节,使当前车辆和前方车辆保持在一个较安全的距离;
98、3.所述车距识别算法可以通过特征提取算法和特征融合算法减少需要进行识别处理的数据量,可提高对道路车辆的车距识别的效率,同时通过多维度的数据保留重要特征数据,又保证了车距识别的准确度。
- 还没有人留言评论。精彩留言会获得点赞!