一种电动汽车电子机械制动间隙自调节控制方法
本发明涉及分布式电驱动线控汽车,具体来说是一种电动汽车电子机械制动间隙自调节控制方法。
背景技术:
1、随着汽车电子化程度的不断深入,人们在追求便捷性的同时对驾驶的安全性提出了更高的要求,电子机械制动系统(electro-mechanical brake,emb)作为线控制动系统的一大分支,代表了汽车制动技术的未来发展方向。emb完全摒弃了传统液压制动系统中复杂繁重的液压管路和元件,系统的电子化、集成化能力增强。相比传统制动系统,emb还具有结构紧凑,制动性能强,制动响应快,精度高,结构简单,维护方便的优点,不仅节能环保,还能显著提升驾驶安全性和操纵稳定性。
2、对于在电子机械制动系统安装时,初始制动间隙的校准面临挑战,并且由于汽车行驶时的颠簸震动、零件老化、齿轮齿面磨损、齿隙增大、滚珠和丝杠直径磨损变小、摩擦片变形、热膨胀等因素,初始间隙容易发生变化,影响制动效果和安全。长时间高强度制动或以及制动系统恶劣的工作环境等因素也会导致制动间隙发生变化。为了保证电子机械制动系统的响应速度和效率,需要一种能够自适应调节间隙的方法,以弥补因摩擦损耗和温度变化导致的间隙变动。
3、因此,如何设计一种能够自动校准初始间隙并实现间隙自适应调节的控制方法是亟待解决的问题。
技术实现思路
1、本发明的目的是为了解决现有技术中初始制动间隙校准困难,无法实现间隙自适应调节的缺陷,提供一种电动汽车电子机械制动间隙自调节控制方法来解决上述问题。
2、为了实现上述目的,本发明的技术方案如下:
3、一种电动汽车电子机械制动间隙自调节控制方法,包括以下步骤:
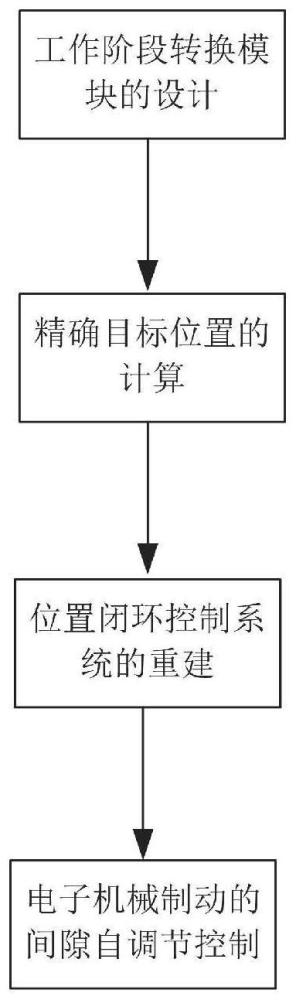
4、工作阶段转换模块的设计:根据参考压力、接触极限标志和分离极限标志进行工作阶段的转换,工作阶段包括空行程阶段、压力跟踪阶段和间隙调节阶段;
5、精确目标位置的计算:根据初始接触位置、磨损补偿位置、间隙调节位置计算出精确目标位置;
6、位置闭环控制系统的重建:以精确目标位置作为位置闭环的参考值,设计非线性前馈pid控制器,提高位置控制的精度和稳定性;
7、电子机械制动的间隙自调节控制:在电动汽车实际运行过程中,根据系统参数的变化转换工作阶段,实现分阶段闭环控制方法,以达到对目标间隙的自调节。
8、所述工作阶段转换模块的设计包括以下步骤:
9、获取工作阶段转换模块的输入量,其包括参考压力fref、接触极限标志flagcontact和分离极限标志flagdiscontact;
10、当接触极限标志flagcontact=0、分离极限标志flagdiscontact=0时,若参考压力fref>0为空行程阶段,消除卡钳与制动盘之间的初始间隙;
11、当flagcontact=1、flagdiscontact=0时为压力跟踪阶段,实现目标制动压力的跟踪;
12、当flagcontact=0、flagdiscontact=1时为间隙调节阶段,实现目标间隙的自调节。
13、所述精确目标位置的计算包括以下步骤:
14、获取初始接触位置:计算空行程阶段中的电机转速变化率wmder,
15、当转速变化率wmder首次低于转速变化阈值wmth时,视为卡钳与制动盘的接触极限点,接触极限标志flagcontact置1,当前电机转角θ为初始接触位置;
16、计算磨损补偿位置:计算压力跟踪阶段中的电机电流变化率iqder,
17、当电流变化率iqder首次低于电流变化阈值iqth时,视为卡钳与制动盘的分离极限点,分离极限标志flagdiscontact置1,当前电机转角θ与θinit的差值为磨损补偿位置;
18、计算间隙调节阶段中的间隙调节位置θgap,其表达式如下:
19、
20、式中:s为目标间隙,ip为行星齿轮减速器减速比,l为滚珠丝杠导程;
21、计算精确目标位置,其表达式如下:
22、θref=θinit+θwear-θgap
23、式中:θref为精确目标位置,θinit为初始接触位置,θwear为磨损补偿位置,θgap为间隙调节位置。
24、所述的设计非线性前馈pid控制器包括以下步骤:
25、设计非线性前馈pid控制器包括非线性pid控制器和前馈控制器,非线性pid控制器包括非线性跟踪微分器和非线性组合;
26、设计非线性跟踪微分器,
27、基于经典非线性跟踪微分器的设计,其表达式如下:
28、
29、式中:θref为精确目标位置;r为速度因子;和为二阶状态方程的状态变量;
30、采用最速控制综合函数fhan(x1,x2,r,h)设计跟踪微分器,其表达式如下:
31、
32、式中,fhan函数公式如下所示:
33、
34、式中:h为跟踪补偿;r为速度因子;d、d0、y、a0、a均为fhan函数的中间变量;
35、设计非线性组合,其表达式如下:
36、
37、式中:kp为非线性组合中的比例系数;ki为积分系数;kd为微分系数;fal(e,α,β)为非线性函数;α用于调节fal(e,α,β)函数的非线性度;β用于调节fal(e,α,β)函数的非线性区间;e1为比例差分信号;e2为微分差分信号;e0为积分差分信号,其表达式如下:
38、
39、式中:v1和v2为目标信号非线性跟踪微分器的输出;y1和y2为反馈信号非线性跟踪微分器的输出;
40、设计前馈控制器,其表达式如下:
41、f(t)=kfv1
42、式中:kf为前馈增益系数;
43、设计非线性前馈pid控制器,其表达式如下:
44、v(t)=v(t)+f(t)=kpfal(e1,α,β)+kifal(e0,α,β)+kdfal(e2,α,β)+kfv1
45、式中:v(t)为非线性前馈pid控制器的输出变量。
46、所述电子机械制动的间隙自调节控制包括以下步骤:
47、制动工况开始时,驾驶员踩下制动踏板发出制动信号给电子控制单元ecu,经ecu综合其他信号计算得到的目标制动压力输入至电子机械制动系统;
48、电子机械制动系统利用工作阶段转换模块在空行程阶段、压力跟踪阶段和间隙调节阶段之间转换;
49、在空行程阶段,以最高转速作为参考转速,调用转速-电流双闭环pi控制器,实现对电子机械制动系统初始间隙的快速消除和初始间隙位置的获取;
50、在压力跟踪阶段,以目标压力作为参考压力,调用压力-电流双闭环pi控制器,实现对电子机械制动系统目标制动力的准确控制和磨损补偿位置的获取;
51、在间隙调节阶段,计算目标间隙位置,得到精确目标位置并输入至非线性前馈pid控制器,构成位置-转速-电流三闭环控制,实现对电子机械制动系统目标间隙的自调节:
52、以初始间隙位置作为位置控制的初始基准值,以磨损补偿位置作为因制动损耗造成的基准值偏移补偿,以间隙调节位置作为目标间隙位置控制的阶跃量,三者融合得到精确目标位置θref;
53、精确目标位置θref同反馈信号θmea输入至非线性前馈pid控制器:
54、非线性前馈pid控制器中,精确目标位置θref和反馈信号θmea经非线性跟踪微分器的作用输出两者的过渡信号v1、y1和微分信号v2、y2,并进行运算得到差分信号e0、e1和e2;
55、差分信号e0、e1和e2经非线性组合得到非线性pid控制器的基础输出变量;
56、输入信号的过渡信号v1经前馈控制器得到非线性pid控制器输出变量的前馈增益;
57、非线性前馈pid控制器的输出变量作为参考转速输入至转速闭环pi控制器,计算参考电流iq;
58、对于表贴式永磁同步电机,基于id=0的弱磁控制,实现dq轴的电流静态解耦,参考电流iq输入至电流闭环pi控制器实现电机输出轴转矩的控制;
59、电机输出轴经电子机械制动系统执行器产生目标间隙,实现电子机械制动系统的间隙自调节。
60、有益效果
61、本发明的一种电动汽车电子机械制动间隙自调节控制方法,与现有技术相比通过获取精确的位置闭环参考值,实现对电子机械制动系统初始间隙的校准,通过接触极限位置、分离极限位置和间隙调节位置的获取实现精确的间隙补偿,根据目标间隙实现自调节控制。
62、本发明通过获取精确的位置闭环参考值,实现对电子机械制动系统初始间隙的校准,克服了因震动,零件老化、变形使得初始间隙发生变化的情况,通过接触极限位置和分离极限位置的获取实现精确的间隙补偿,克服因制动磨损或升温变形导致制动前后间隙的变化,根据目标间隙实现自调节控制。
63、本发明设计的间隙自调节控制方法可以不依赖人工安装的校准就能实现对电子机械制动系统初始间隙的控制,能在高强度的制动工况中,弥补因制动盘摩擦损耗以及工作温度升高导致制动盘膨胀形变而产生的间隙变化,在每次制动过程后都能进行目标间隙的跟踪,保证下一次制动工况的响应速度。
- 还没有人留言评论。精彩留言会获得点赞!