一种建筑工程用测量机器人的制作方法
本技术涉及一种地貌勘察辅助设备,具体涉及一种建筑工程用测量机器人。
背景技术:
1、在建筑工程施工开展前,工作人员需要对指定的施工地点进行充分的地质勘探操作,工程地质勘察是为查明影响工程建筑物的地质因素而进行的地质调查研究工作,所需勘察的地质因素包括地质结构或地质构造:地貌、水文地质条件、土和岩石的物理力学性质,自然(物理)地质现象和天然建筑材料等,这之中便需要使用到测量仪器。而现有的测量仪器都是工作人员手持操作,不仅不够便捷,而且还会影响到工作人员对所测得数据的记录工作。因此我们采用测量车的方式来方便工作人员进行远程操作勘探。但由于建筑施工地选址不同其地貌特征也有很大差别,如此一来测量车在受到远程操作移动时就容易发生侧翻问题,因此需要一种不容易侧翻的建筑工程用测量机器人。
技术实现思路
1、发明目的:本实用新型目的在于针对现有技术的不足,提供一种自行移动过程中对于侧翻能自主调正、不容易发生侧翻的建筑工程用测量机器人。
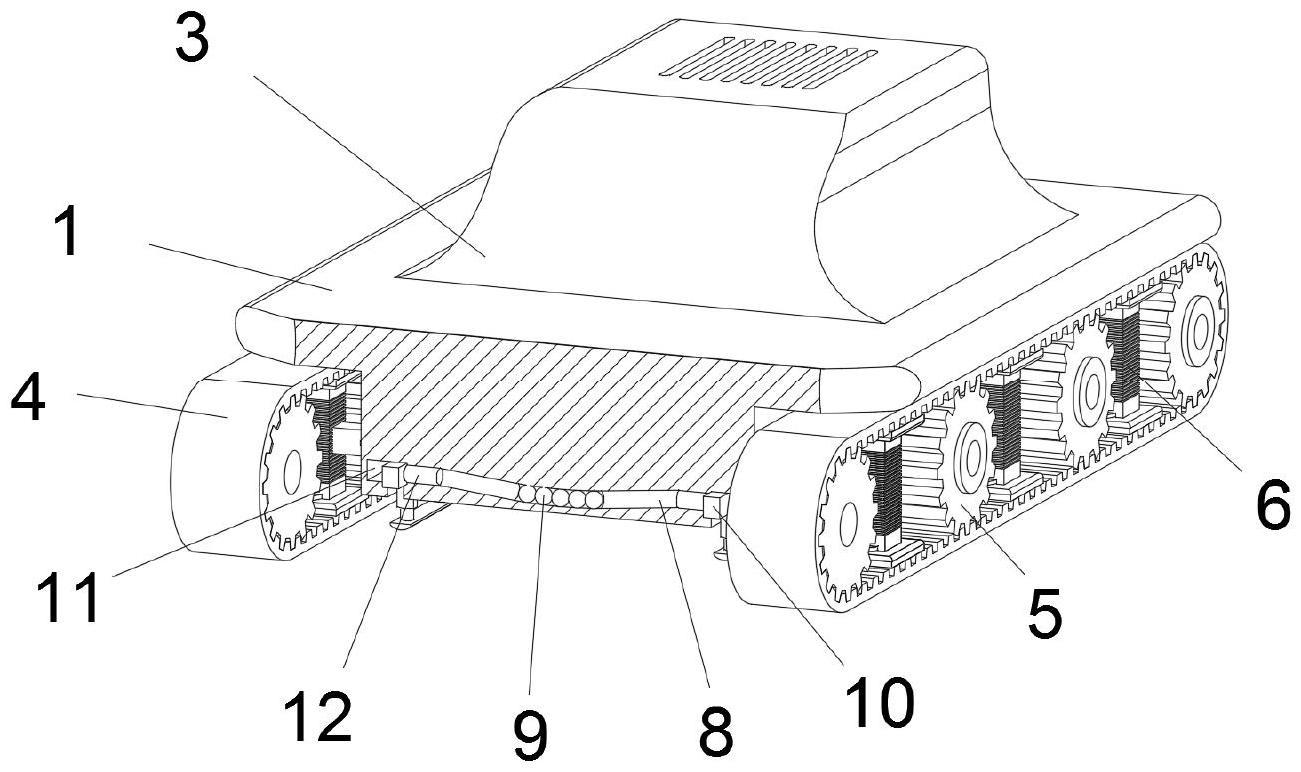
2、技术方案:本实用新型所述建筑工程用测量机器人,包括移动座、支架和控制箱,所述移动座内部沿车轮轴向设置有多道v型检测槽,所述检测槽中设置有多个检测珠;所述检测槽的两端还设置有限位装置和调整装置,当测量机器人即将发生侧翻时,所述检测珠在重力作用下滚动到一侧挤压限位装置,触发调整装置进行调整。
3、具体来说,所述限位装置包括磁铁、滑槽和限位杆,所述磁铁的顶部设置在所述滑槽中,在外力的作用下可以沿着所述滑槽向外滑动;所述限位杆的一端固定在所述磁铁的侧面,另一端设置在所述检测槽中,与所述检测槽滑动连接;所述调整装置包括套杆、延长杆、弹簧和挤压板,所述套杆设置在所述延长杆的外部,所述弹簧设置在所述套杆内,固定连接所述套杆和所述延长杆;所述挤压板设置在所述延长杆的底部;所述套杆、延长杆和弹簧在所述磁铁磁性吸力下固定在所述磁铁下方;在发生侧翻之前,所述检测珠在重力作用下滚动到一侧挤压所述限位杆,所述磁铁在外力作用下沿所述滑槽向外滑动;所述弹簧在失去磁力的瞬间伸长,通过所述延长杆弹出所述挤压板对地面撞击从而实现自行调整。挤压板对地面撞击调整避免侧翻发生,检测珠又回复到v型检测槽的中间,磁铁复位,所述套杆、延长杆和弹簧在再次在磁铁磁性吸力下固定在所述磁铁下方。
4、优选地,所述支架为“π”型支架,所述支架的中部设置有第一测量仪器,所述支架的顶部两端设置有第二测量仪器,这样设计能够勘测的视野更加广阔,工作人员只需远程操纵移动座1移动即可达到对施工现场进行勘测的目的,方便快捷。
5、优选地,所述控制箱为封闭箱体,内设有电源、单片机、遥控单元和电子元件,在封闭箱体中进行保护。
6、优选地,所述移动座的两侧车轮为多个齿轮,多个齿轮的外部通过相互啮合的履带连接,通过履带可以适用于更加复杂的地形地貌,降低其侧翻的可能性。
7、优选地,相邻齿轮之间设置有支撑柱,对所述履带的内侧进行支撑,令履带在相邻两个齿轮之间的部分不会产生松弛问题,以提高本装置的移动稳定性。
8、优选地,所述移动座两侧的同一轴向的两个齿轮之间通过转轴连接,进行同轴转动;所述转轴由电机和呈l型设置的两个锥齿轮驱动。
9、有益效果:(1)本实用新型能够在移动座即将倾倒时为其提供扶正的力,避免其侧翻为工作人员带来不必要的辛劳;(2)本实用新型运作稳定性,不易产生倾倒,且能够灵活的适用于各种不同的地形地貌,极大提高了对工作人员勘察工作的帮助;(3)本实用新型增加了勘测设备拍摄面的同时还使得本装置能够远程操作,方便了工作人员的地貌勘察工作。
技术特征:
1.一种建筑工程用测量机器人,包括移动座(1)、支架(2)和控制箱(3),其特征在于:所述移动座(1)内部沿车轮轴向设置有多道v型检测槽(8),所述检测槽(8)中设置有多个检测珠(9);所述检测槽(8)的两端还设置有限位装置和调整装置,当测量机器人即将发生侧翻时,所述检测珠(9)在重力作用下滚动到一侧挤压限位装置,触发调整装置进行调整。
2.根据权利要求1所述建筑工程用测量机器人,其特征在于:所述限位装置包括磁铁(10)、滑槽(11)和限位杆(12),所述磁铁(10)的顶部设置在所述滑槽(11)中,在外力的作用下可以沿着所述滑槽(11)向外滑动;所述限位杆(12)的一端固定在所述磁铁(10)的侧面,另一端设置在所述检测槽(8)中,与所述检测槽(8)滑动连接;所述调整装置包括套杆(13)、延长杆(14)、弹簧(15)和挤压板(16),所述套杆(13)设置在所述延长杆(14)的外部,所述弹簧(15)设置在所述套杆(13)内,固定连接所述套杆(13)和所述延长杆(14);所述挤压板(16)设置在所述延长杆(14)的底部;所述套杆(13)、延长杆(14)和弹簧(15)在所述磁铁(10)磁性吸力下固定在所述磁铁(10)下方;在发生侧翻之前,所述检测珠(9)在重力作用下滚动到一侧挤压所述限位杆(12),所述磁铁(10)在外力作用下沿所述滑槽(11)向外滑动;所述弹簧(15)在失去磁力的瞬间伸长,通过所述延长杆(14)弹出所述挤压板(16)对地面撞击从而实现自行调整。
3.根据权利要求1所述建筑工程用测量机器人,其特征在于:所述支架(2)为“π”型支架,所述支架(2)的中部设置有第一测量仪器(301),所述支架(2)的顶部两端设置有第二测量仪器(302)。
4.根据权利要求1所述建筑工程用测量机器人,其特征在于:所述控制箱(3)为封闭箱体,内设有电源、单片机、遥控单元和电子元件。
5.根据权利要求1所述建筑工程用测量机器人,其特征在于:所述移动座(1)的两侧车轮为多个齿轮(5),多个齿轮(5)的外部通过相互啮合的履带(4)连接。
6.根据权利要求5所述的建筑工程用测量机器人,其特征在于:相邻齿轮(5)之间设置有支撑柱(6),对所述履带(4)的内侧进行支撑。
7.根据权利要求5所述的建筑工程用测量机器人,其特征在于:所述移动座(1)两侧的同一轴向的两个齿轮(5)之间通过转轴(702)连接,进行同轴转动;所述转轴(702)由电机(7)和呈l型设置的两个锥齿轮(701)驱动。
技术总结
本技术公开一种建筑工程用测量机器人,包括移动座(1)、支架(2)和控制箱(3),所述移动座(1)内部沿车轮轴向设置有多道V型检测槽(8),所述检测槽(8)中设置有多个检测珠(9);所述检测槽(8)的两端还设置有限位装置和调整装置,当测量机器人即将发生侧翻时,所述检测珠(9)在重力作用下滚动到一侧挤压限位装置,触发调整装置进行调整。本技术能够在移动座即将倾倒时为其提供扶正的力,避免其侧翻为工作人员带来不必要的辛劳。
技术研发人员:刘欣,吴平,张源彬,蒋和亮,张鹏
受保护的技术使用者:中建八局第三建设有限公司
技术研发日:20230213
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!