一种机器人用全向轮的制作方法
本技术属于车轮结构设计与制造,具体涉及一种机器人用全向轮。
背景技术:
1、全向轮技术的全方位运动设备可以实现前行、横移、斜行、旋转及其组合等运动方式。在此基础上研制的机器人行走用全向轮也是较为常见,而由于全向轮结构较于传统机器人用行走轮结构组成上偏复杂点,而全向轮日常便捷拆卸维修也较为重要,通过有效的维修和保养能够有效增加全向轮的使用寿命,基于此,在传统全向轮的基础上,提供一种便于快速拆装的机器人用全向轮是存在较高实用意义的。
技术实现思路
1、本实用新型的目的在于提供一种机器人用全向轮,旨在解决上述技术问题。
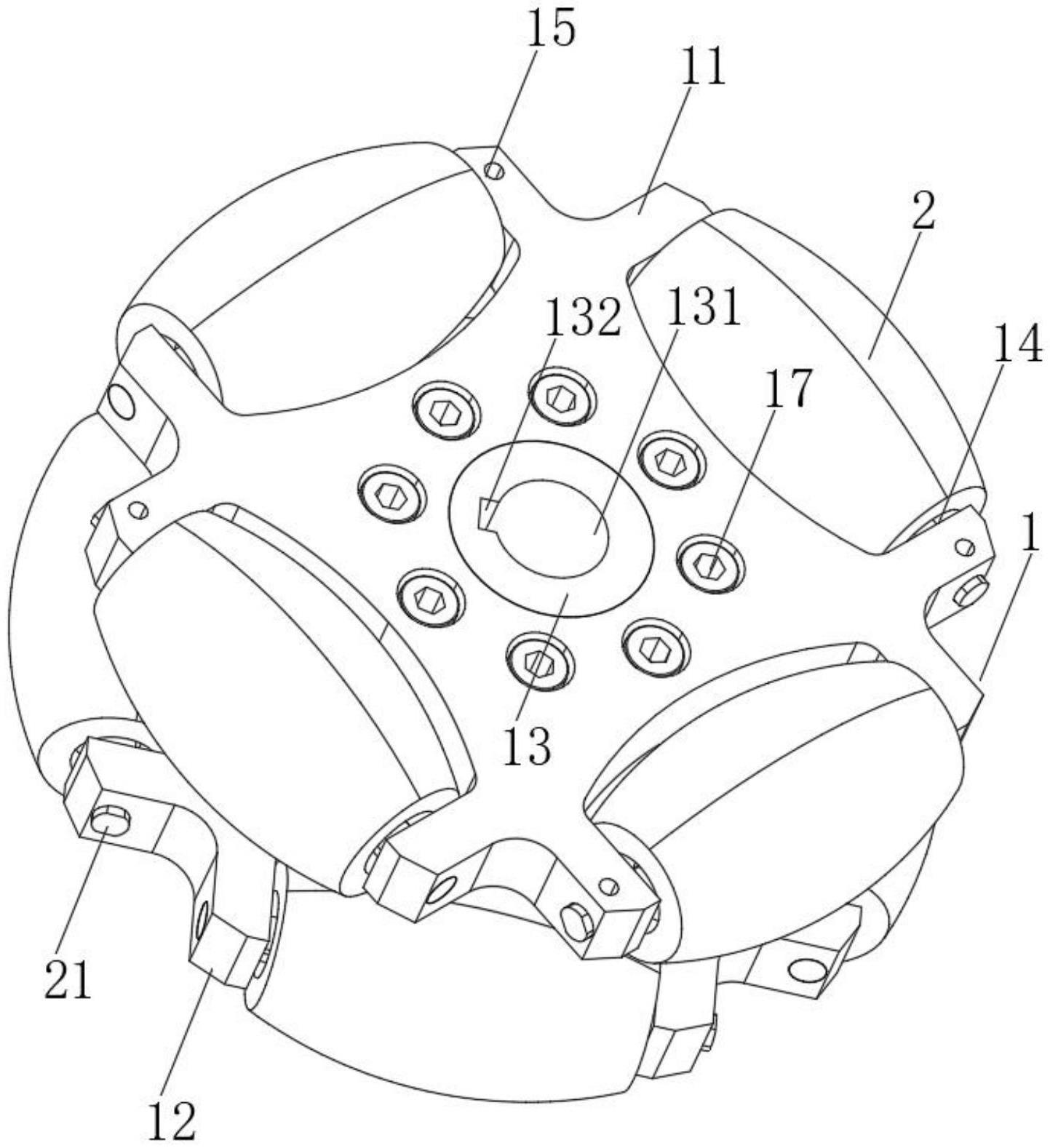
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人用全向轮,包括轮架,所述轮架包括上架体和下架体,所述上架体和下架体中部开槽内插接有支撑架,所述支撑架的中部设有机器人轴体进行插接的轴孔,所述轴孔的孔壁开设有限位槽,所述上架体和下架体的外侧均开设有多个滚动体安装槽,上架体和下架体的表面开设有多个螺钉孔;
3、多个滚动体,多个所述滚动体置于对应的滚动体安装槽内,所述滚动体还通过插接销与滚动体安装槽开有的槽孔安装。
4、作为本实用新型一种机器人用全向轮优选的,所述支撑架的两端设有凸起部,所述凸起部插接于上架体和下架体开槽内并与槽口齐平设置。
5、作为本实用新型一种机器人用全向轮优选的,所述凸起部的底部开设有多个螺纹孔,所述上架体和下架体的表面均开设有与螺纹孔连通的沉孔,所述沉孔通过内六角螺杆与螺纹孔固定连接。
6、作为本实用新型一种机器人用全向轮优选的,所述螺钉孔与所述槽孔连通,且所述螺钉孔通过螺纹连接的螺钉与插接销的一端抵紧固定。
7、作为本实用新型一种机器人用全向轮优选的,所述滚动体的内部嵌设有轴承,所述轴承内圈与插接销套接。
8、与现有技术相比,本实用新型的有益效果是:通过螺钉孔内螺纹连接的螺钉方便使用人员插拔插接销便捷的将滚动体进行拆装,方便人员对滚动体进行清洁和日常维护,支撑架通过设置轴孔能够与机器人适配的轴体快速套接,在插接的同时还能通过限位槽进行限位,再利用销轴卡将机器人轴体一端锁紧,继而快速能够完成全向轮与机器人轴体的安装,同时也方便使用人员对该全向轮与轴体拆卸后进行清理维护,有效提高该全向轮的实用性以及使用寿命。
技术特征:
1.一种机器人用全向轮,其特征在于,包括:轮架(1),所述轮架(1)包括上架体(11)和下架体(12),所述上架体(11)和下架体(12)中部开槽内插接有支撑架(13),所述支撑架(13)的中部设有机器人轴体进行插接的轴孔(131),所述轴孔(131)的孔壁开设有限位槽(132),所述上架体(11)和下架体(12)的外侧均开设有多个滚动体安装槽(14),上架体(11)和下架体(12)的表面开设有多个螺钉孔(15);
2.根据权利要求1所述的一种机器人用全向轮,其特征在于:所述支撑架(13)的两端设有凸起部(133),所述凸起部(133)插接于上架体(11)和下架体(12)开槽内并与槽口齐平设置。
3.根据权利要求2所述的一种机器人用全向轮,其特征在于:所述凸起部(133)的底部开设有多个螺纹孔(134),所述上架体(11)和下架体(12)的表面均开设有与螺纹孔(134)连通的沉孔(16),所述沉孔(16)通过内六角螺杆(17)与螺纹孔(134)固定连接。
4.根据权利要求1所述的一种机器人用全向轮,其特征在于:所述螺钉孔(15)与所述槽孔(141)连通,且所述螺钉孔(15)通过螺纹连接的螺钉与插接销(21)的一端抵紧固定。
5.根据权利要求1所述的一种机器人用全向轮,其特征在于:所述滚动体(2)的内部嵌设有轴承,所述轴承内圈与插接销(21)套接。
技术总结
本技术提供一种机器人用全向轮,包括轮架和多个滚动体,轮架包括上架体和下架体,上架体和下架体中部开槽内插接有支撑架,支撑架的中部设有机器人轴体进行插接的轴孔,轴孔的孔壁开设有限位槽,上架体和下架体的外侧均开设有多个滚动体安装槽,多个滚动体置于对应的滚动体安装槽内,本技术通过螺钉孔内螺纹连接的螺钉方便使用人员插拔插接销便捷的将滚动体进行拆装,方便人员对滚动体进行清洁和日常维护,支撑架通过设置轴孔能够与机器人适配的轴体快速套接,在插接的同时还能通过限位槽进行限位,再利用销轴卡将机器人轴体一端锁紧,继而快速能够完成全向轮与机器人轴体的安装。
技术研发人员:张淳武,丁辉程
受保护的技术使用者:东莞市璋新五金机械有限公司
技术研发日:20230331
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!