一种FOV可随车轨迹主动旋转的自动驾驶前视摄像头的制作方法
本技术属于车载摄像头,涉及一种fov可随车轨迹主动旋转的自动驾驶前视摄像头。
背景技术:
1、现有前视摄像头是直接固定在杂光保护罩上,且摄像头光轴布置时与整车中心轴线平行,工作时前视摄像头的fov视野范围是固定的。此种形式存在以下问题:车身向左或向右转向时,fov相对转向方范围固定,会存在一段盲区,导致前视摄像头无法捕捉到转向区域更多的场景细节,影响自动驾驶系统的判断,存在安全隐患。
技术实现思路
1、鉴于上述技术问题,本实用新型的目的在于提供一种fov可随车轨迹主动旋转的自动驾驶前视摄像头,该前视摄像头的fov视野范围可跟随车身轨迹的变化而调整,在车辆转弯时可通过主动旋转的方式提前补偿转向方向的视野,减小转向一侧的盲区范围,保证摄像头能够捕捉到更多的转向区域的场景细节,提高自动驾驶的安全性。
2、为实现上述目的,本实用新型采用如下技术方案:
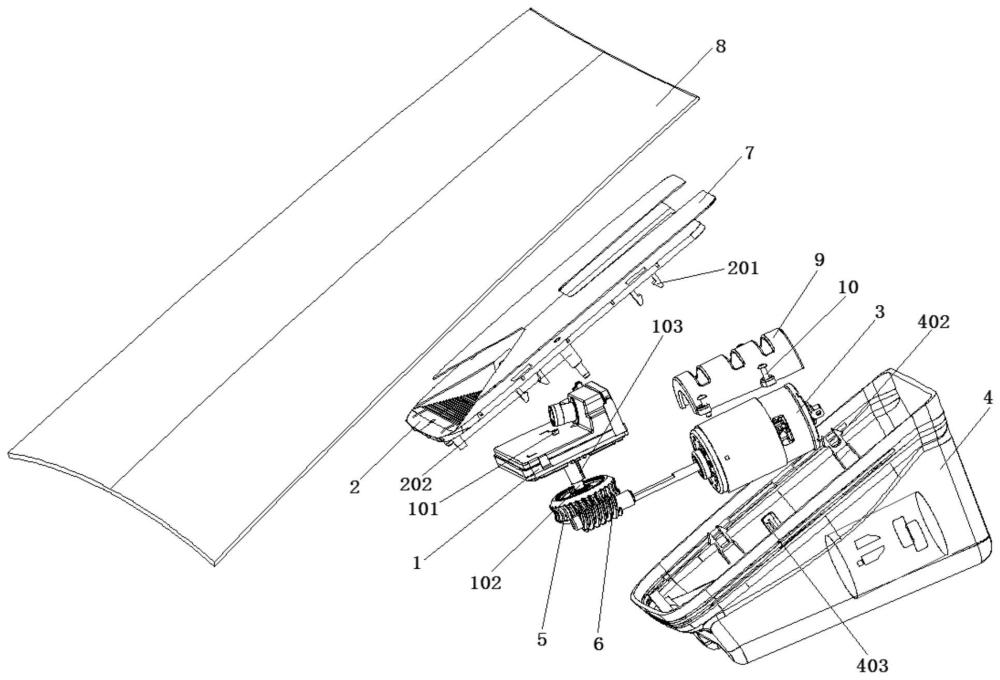
3、一种fov可随车轨迹主动旋转的自动驾驶前视摄像头,包括前视摄像头主体、减速齿轮组、电机、壳体;其中,所述前视摄像头主体的顶面设有上转轴,前视摄像头主体的底部设有下转轴;所述上转轴与杂光保护罩转动连接;所述下转轴的侧面设有限位凸起,带有限位凸起的下转轴与减速齿轮组的减速轮过盈配合,下转轴的端部安装在壳体上且相对壳体转动;所述减速齿轮组、电机安装在壳体内,由电机驱动减速齿轮组动作,从而带动前视摄像头主体逆时针或顺时针旋转一定角度;所述壳体为顶面敞口的箱体结构,壳体的顶面安装在杂光保护罩上。
4、作为本实用新型的优选,所述减速齿轮组包括涡轮、蜗杆,所述涡轮为减速轮,涡轮的轴心位置加工有与带有限位凸起的下转轴匹配的安装孔,涡轮与带有限位凸起的下转轴过盈配合;所述蜗杆与涡轮啮合;所述电机的输出轴与蜗杆连接,电机驱动蜗杆转动,蜗杆驱动涡轮转动,涡轮带动前视摄像头主体逆时针或顺时针旋转一定角度。
5、作为本实用新型的优选,所述电机通过电机固定压板、自攻螺钉固定在壳体的底部,电机为步进电机。
6、作为本实用新型的优选,所述杂光保护罩朝向壳体的一侧设有多个母卡爪,所述壳体的内侧壁在与母卡爪相对的位置设有公卡爪,所述母卡爪与公卡爪卡接;所述杂光保护罩朝向壳体的一侧还设有定位柱,所述壳体的内侧壁在与定位柱相对的位置设置定位套。
7、作为本实用新型的优选,所述杂光保护罩通过双面胶粘在车的前挡风玻璃上,杂光保护罩在与前视摄像头主体的镜头相对的位置开设避让豁口,所述避让豁口的大小为满足前视摄像头主体旋转一定角度时杂光保护罩不会与镜头发生干涉的最小尺寸。
8、作为本实用新型的优选,所述杂光保护罩与上转轴连接的位置设有第一轴承安装槽,所述第一轴承安装槽内安装有第一轴承,所述上转轴与第一轴承的内圈过盈配合;所述壳体与下转轴连接的位置设有第二轴承安装槽,所述第二轴承安装槽内安装有第二轴承,所述下转轴的端部与第二轴承的内圈过盈配合。
9、作为本实用新型的优选,所述步进电机与整车控制器电连接,转向信号通过整车控制器传递给电机的控制模块,电机的控制模块控制步进电机的输出轴正转或反转。
10、本实用新型的优点和有益效果:
11、(1)本实用新型提供的前视摄像头打破传统直接将摄像头固定在杂光保护罩上的安装形式,而是将前视摄像头与减速齿轮组、电机一同安装在壳体内,之后将壳体固定在杂光保护罩上,前视摄像头与杂光保护罩转动连接,此种设计能够实现对前视摄像头的安装固定,同时还能利用电机驱动前视摄像头逆时针或顺时针旋转一定角度;当车辆转弯时,可以通过主动旋转前视摄像头的方式提前补偿转向方向的视野,减小转向一侧的盲区范围,保证摄像头能够捕捉到更多的转向区域的场景细节(障碍物以及道路的行驶状况),提高自动驾驶的安全性。
12、(2)本实用新型减速齿轮组为涡轮、蜗杆形式,此种结构可以精准的控制前视摄像头的旋转角度,提前做出fov区域的盲区补偿。
13、(3)本实用新型杂光保护罩上设有定位柱、壳体上设有定位套,壳体与杂光保护罩采用卡接方式固定,此种设计安装方便。
技术特征:
1.一种fov可随车轨迹主动旋转的自动驾驶前视摄像头,其特征在于,包括前视摄像头主体、减速齿轮组、电机、壳体;其中,所述前视摄像头主体的顶面设有上转轴,前视摄像头主体的底部设有下转轴;所述上转轴与杂光保护罩转动连接;所述下转轴的侧面设有限位凸起,带有限位凸起的下转轴与减速齿轮组的减速轮过盈配合,下转轴的端部安装在壳体上且相对壳体转动;所述减速齿轮组、电机安装在壳体内,由电机驱动减速齿轮组动作,从而带动前视摄像头主体逆时针或顺时针旋转一定角度;所述壳体为顶面敞口的箱体结构,壳体的顶面安装在杂光保护罩上。
2.根据权利要求1所述的一种fov可随车轨迹主动旋转的自动驾驶前视摄像头,其特征在于,所述减速齿轮组包括涡轮、蜗杆,所述涡轮为减速轮,涡轮的轴心位置加工有与带有限位凸起的下转轴匹配的安装孔,涡轮与带有限位凸起的下转轴过盈配合;所述蜗杆与涡轮啮合;所述电机的输出轴与蜗杆连接,电机驱动蜗杆转动,蜗杆驱动涡轮转动,涡轮带动前视摄像头主体逆时针或顺时针旋转一定角度。
3.根据权利要求1所述的一种fov可随车轨迹主动旋转的自动驾驶前视摄像头,其特征在于,所述电机通过电机固定压板、自攻螺钉固定在壳体的底部,电机为步进电机。
4.根据权利要求1所述的一种fov可随车轨迹主动旋转的自动驾驶前视摄像头,其特征在于,所述杂光保护罩朝向壳体的一侧设有多个母卡爪,所述壳体的内侧壁在与母卡爪相对的位置设有公卡爪,所述母卡爪与公卡爪卡接;所述杂光保护罩朝向壳体的一侧还设有定位柱,所述壳体的内侧壁在与定位柱相对的位置设置定位套。
5.根据权利要求1所述的一种fov可随车轨迹主动旋转的自动驾驶前视摄像头,其特征在于,所述杂光保护罩通过双面胶粘在车的前挡风玻璃上,杂光保护罩在与前视摄像头主体的镜头相对的位置开设避让豁口,所述避让豁口的大小为满足前视摄像头主体旋转一定角度时杂光保护罩不会与镜头发生干涉的最小尺寸。
6.根据权利要求1所述的一种fov可随车轨迹主动旋转的自动驾驶前视摄像头,其特征在于,所述杂光保护罩与上转轴连接的位置设有第一轴承安装槽,所述第一轴承安装槽内安装有第一轴承,所述上转轴与第一轴承的内圈过盈配合;所述壳体与下转轴连接的位置设有第二轴承安装槽,所述第二轴承安装槽内安装有第二轴承,所述下转轴的端部与第二轴承的内圈过盈配合。
7.根据权利要求3所述的一种fov可随车轨迹主动旋转的自动驾驶前视摄像头,其特征在于,所述步进电机与整车控制器电连接,转向信号通过整车控制器传递给电机的控制模块,电机的控制模块控制步进电机的输出轴正转或反转。
技术总结
本技术涉及一种FOV可随车轨迹主动旋转的自动驾驶前视摄像头,包括前视摄像头主体、减速齿轮组、电机、壳体;其中,所述前视摄像头主体的顶面设有上转轴,前视摄像头主体的底部设有下转轴;所述上转轴与杂光保护罩转动连接;所述下转轴的侧面设有限位凸起,带有限位凸起的下转轴与减速齿轮组的减速轮过盈配合,下转轴的端部安装在壳体上且相对壳体转动;所述减速齿轮组、电机安装在壳体内,由电机驱动减速齿轮组动作,从而带动前视摄像头主体逆时针或顺时针旋转一定角度;所述壳体为顶面敞口的箱体结构,壳体的顶面安装在杂光保护罩上。该前视摄像头在车辆转弯时可通过主动旋转的方式提前补偿转向方向的视野,减小转向一侧的盲区范围。
技术研发人员:徐相东,刘晓超,高荣荣
受保护的技术使用者:苏州易航远智智能科技有限公司
技术研发日:20230830
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!