新型蜘蛛车混合动力系统的制作方法
本申请涉及及蜘蛛车的混合动力系统领域,具体涉及一种新型蜘蛛车混合动力系统。
背景技术:
1、现阶段,蜘蛛车的使用量越来越大,因为其能广泛用于桥梁、建筑、电力、商场、郊外等需要进行高空作业且有通过性要求的场合。现有领域中,为了满足使用场所和使用时间的需求,会适配越来越多的动力设备,概括来讲也就分为大致两个,如常在室外用,且不好接电时,会搭载发动机作为主动力,再搭配一个电机作为应急动力使用;如常在室内工作,则会以电池或者外接交流电带动电机运转作为主动力。无论是发动机作为主动力还是电机作为主动力,其动力之间都是相互独立,且在发动机驱动整车完成各个功能时,由于蜘蛛车展臂、行走、支腿等各个动作之间相互独立,发动机的效率并不能得到很好的利用,造成的损失比较大。
技术实现思路
1、本申请实施例的目的在于提供一种新型蜘蛛车混合动力系统,利用发动机损失的那部分效率为电池充电,将损失的能量得以利用存储,再利用这部分电能驱动液压油泵工作,既使得发动机的效率得到更大程度的利用,又可以将电机与发动机相互结合。
2、为实现上述目的,本申请提供如下技术方案:
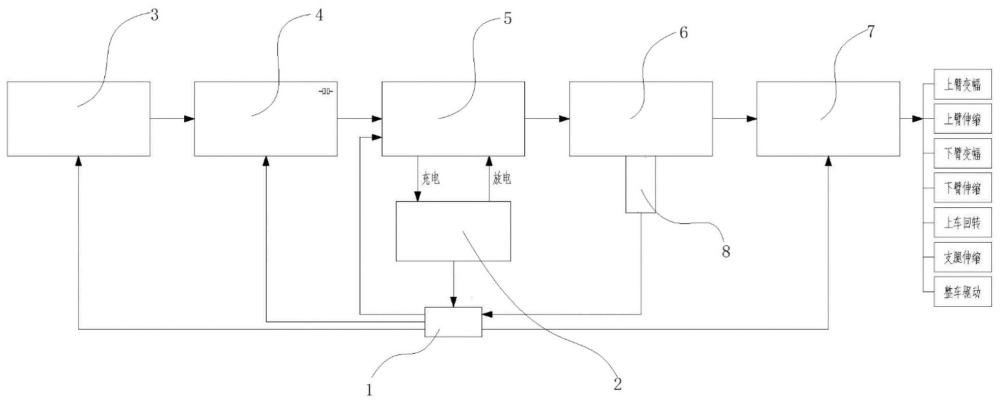
3、申请实施例提供一种新型蜘蛛车混合动力系统,包括发动机、电磁离合器、发电机/马达两用机、液压油泵、电磁控制阀组、电瓶、压力传感器和控制单元,发动机与发电机/马达两用机之间通过电磁离合器进行连接,再将发电机/马达两用机与液压油泵进行连接,液压油泵出油端与电磁控制阀组进行连接,所述电磁控制阀组连接蜘蛛车的动作部件,由液力来驱动整车动作,发电机/马达两用机与电瓶连接,将发动机、发电机/马达两用机、液压油泵进行串联结合在一起。
4、本申请实施例提供另一种新型蜘蛛车混合动力系统,包括发动机、可分离式分动箱、发电机/马达两用机、液压油泵、电磁控制阀组、电瓶、压力传感器和控制单元,液压油泵通过可分离式分动箱主离合器与发动机连接,发电机/马达两用机与可分离式分动箱的分离合器进行连接,液压油泵出油端与电磁控制阀组进行连接,所述电磁控制阀组连接蜘蛛车的动作部件,由液力来驱动整车动作,发电机/马达两用机与电瓶连接,将可分离式分动箱和发电机/马达两用机并联式结合。
5、所述液压油泵的出口端串一个压力传感器来实时监测油泵出口的压力值,压力传感器连接到控制单元。
6、与现有技术相比,本实用新型的有益效果是:将蜘蛛车中发动机与电机搭配相互独立驱动结合在一起,发电机利用发动机运转驱动蜘蛛车的损失功率或者剩余功率进行发电存储到电瓶,电瓶放电驱动电机带动液压油泵泵油来完成整车功能动作,既将发动机的功率得到了最大极限的利用,又将蜘蛛车上发动机与电机进行了一个结合,实现了蜘蛛车上从未出现过的混合动力布置。
技术特征:
1.一种新型蜘蛛车混合动力系统,其特征在于,包括发动机、电磁离合器、发电机/马达两用机、液压油泵、电磁控制阀组、电瓶、压力传感器和控制单元,发动机与发电机/马达两用机之间通过电磁离合器进行连接,再将发电机/马达两用机与液压油泵进行连接,液压油泵出油端与电磁控制阀组进行连接,所述电磁控制阀组连接蜘蛛车的动作部件,由液力来驱动整车动作,发电机/马达两用机与电瓶连接,将发动机、发电机/马达两用机、液压油泵进行串联结合在一起。
2.一种新型蜘蛛车混合动力系统,其特征在于,包括发动机、可分离式分动箱、发电机/马达两用机、液压油泵、电磁控制阀组、电瓶、压力传感器和控制单元,液压油泵通过可分离式分动箱主离合器与发动机连接,发电机/马达两用机与可分离式分动箱的分离合器进行连接,液压油泵出油端与电磁控制阀组进行连接,所述电磁控制阀组连接蜘蛛车的动作部件,由液力来驱动整车动作,发电机/马达两用机与电瓶连接,将可分离式分动箱和发电机/马达两用机并联式结合。
3.根据权利要求1或2所述的一种新型蜘蛛车混合动力系统,其特征在于,所述液压油泵的出口端串一个压力传感器来实时监测油泵出口的压力值,压力传感器连接到控制单元。
技术总结
本申请涉及一种新型蜘蛛车混合动力系统,包括发动机、电磁离合器、发电机/马达两用机、液压油泵、电磁控制阀组、电瓶、压力传感器和控制单元,发动机与发电机/马达两用机之间通过电磁离合器进行连接,再将发电机/马达两用机与液压油泵进行连接,液压油泵出油端与电磁控制阀组进行连接,所述电磁控制阀组连接蜘蛛车的动作部件,由液力来驱动整车动作,发电机/马达两用机与电瓶连接,将发动机、发电机/马达两用机、液压油泵进行串联结合在一起。本申请利用发动机损失的那部分效率为电池充电,将损失的能量得以利用存储,再利用这部分电能驱动液压油泵工作,既使得发动机的效率得到更大程度的利用,又可以将电机与发动机相互结合。
技术研发人员:夏曙光
受保护的技术使用者:湖北高曼重工科技有限公司
技术研发日:20231124
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!