一种用于锥桶封路场景的自动驾驶变道方法及车辆与流程
本发明属于自动驾驶,具体涉及到一种用于锥桶封路场景的自动驾驶变道方法及车辆。
背景技术:
1、当前自动驾驶车辆在面临锥桶封路场景下的变道策略为:决策对锥桶入侵自车车道的距离进行计算车道剩余的横向通行距离,仅在锥桶入侵自车车道达到车道剩余的横向通行距离时,自车会产生变道意图进行变道。锥桶的位置信息由决策的上游感知提供,但目前自动驾驶车辆的感知通常面临两个问题:
2、1.自车是否变道完全依赖上游感知什么时候看到锥桶,但实际行驶过程中,自车大概率会受到前方其他社会车辆的遮挡,导致较晚看到锥桶入侵,等到想要变道时,自车与锥桶的纵向距离已经较近了,造成自车变道困难,甚至可能导致自车刹停在锥桶前,降低车辆运行效率;
3、2.锥桶横向入侵是否达到预设距离的检测并不稳定,可能第一帧小于车道剩余的横向通行距离,第二帧就大于车道剩余的横向通行距离,而下游决策是根据是否超过车道剩余的横向通行距离进行判断是否变道的,如果小于车道剩余的横向通行距离则不需要变道,这就导致下游一时认为要变道,一时认为没有必要变道,自车便会在路上出现画龙现象,增大了自车的行车风险。
技术实现思路
1、针对上述问题,本发明的主要目的在于设计一种用于锥桶封路场景的自动驾驶变道方法及车辆,解决自动驾驶车辆依赖于感知锥桶时间较晚造成变道困难,甚至刹停在锥桶前的问题,以及感知锥桶后通过帧间车道剩余的横向通行距离,而判定不稳定,造成的车辆画龙现象。
2、为了实现上述目的本发明采用如下技术方案:
3、一种用于锥桶封路场景的自动驾驶变道方法,该方法的系统包括数据获取模块、锥桶风险评估模块、变道策略决策模块、仿真测试与验证模块;
4、该方法包括如下步骤:
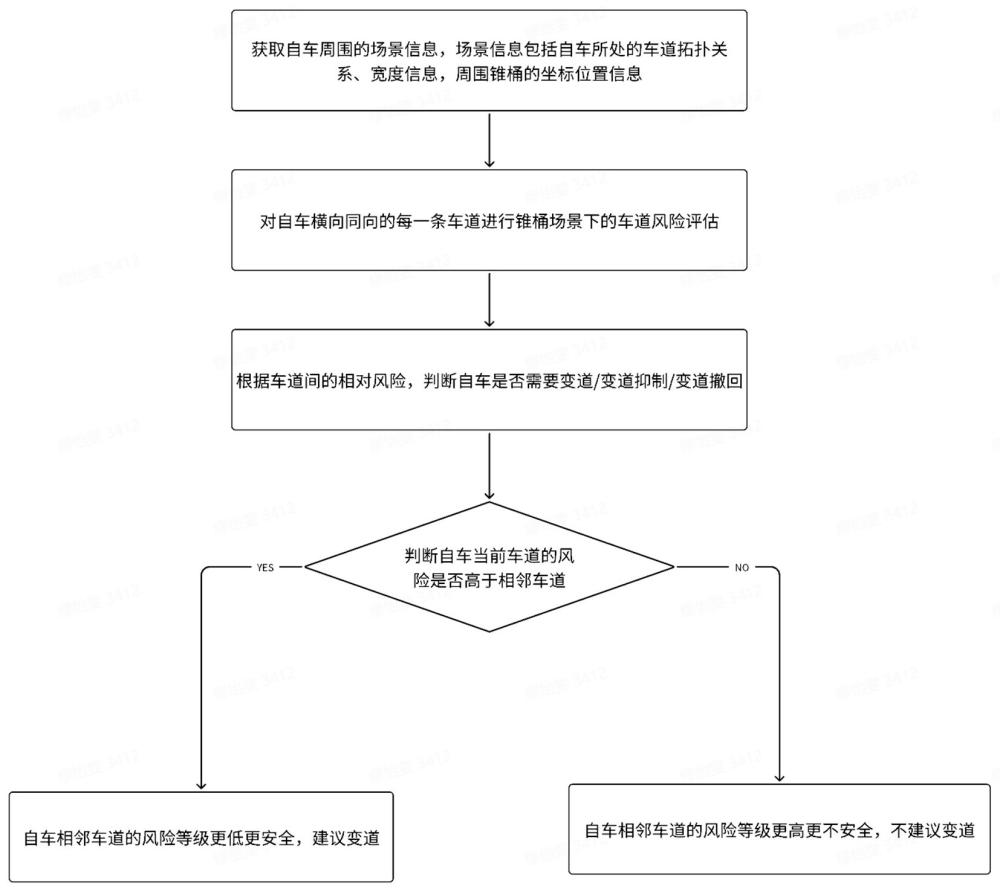
5、步骤1:通过数据获取模块实时获取自动驾驶车辆在驾驶场景下的基本信息;
6、步骤2:根据步骤1获取的信息,通过锥桶风险评估模块进行决策各车道的风险评估,并进行车道的风险等级划分;
7、步骤3:基于车道间的相对风险,通过变道策略决策模块对自动驾驶车辆进行决策动作;
8、步骤4:通过仿真测试与验证模块,结合实际路段测试,进行验证自动驾驶车辆的决策,并进行迭代优化自动驾驶车辆决策过程中的参数。
9、作为本发明进一步的描述,所述步骤1中,车辆在驾驶场景下的基本信息包括:自车位置、速度、转向灯状态及周围的障碍物位置信息;
10、所述的障碍物包括锥桶。
11、作为本发明进一步的描述,所述步骤2中,锥桶风险评估模块针对各车道的风险评估为,根据自车需要的横向通行空间,和车道实际剩余的横向通行空间,判断每条车道是否能够通行,包括如下步骤:
12、s201:根据自车的尺寸信息,确定自车所需要的横向通行距离,表达式为:
13、d_pass = l_ego + l_mirror*2 + buffer*2
14、其中,d_pass为自车所需要的横向通行距离,l_ego为自车的横向宽度,l_mirror为后视镜宽度,buffer为缓冲距离;
15、s202:根据锥桶的位置、实际的横向车道宽度以及与自车位置,计算车道剩余的横向通行距离,计算方式为:
16、d_lane = l_lane – d_cone
17、其中,d_lane为车道剩余的横向通行距离,l_lane为实际的横向车道宽度,d_cone为锥桶在车道内占据的横向距离;
18、s203:通过步骤s201自车所需要的横向通行距离与步骤s202车道剩余的横向通行距离对比,进行车道风险等级判断。
19、作为本发明进一步的描述,所述车道风险等级包括高风险、中风险、低风险;
20、其中,所述高风险为车道剩余的横向通行距离小于等于自车所需要的横向通行距离;
21、所述中风险为车道剩余的横向通行距离大于自车所需要的横向通行距离,且车道的旁侧车道剩余的横向通行距离小于等于自车所需要的横向通行距离;
22、所述低风险为车道剩余的横向通行距离大于自车所需要的横向通行距离,且车道的旁侧车道剩余的横向通行距离大于自车所需要的横向通行距离。
23、作为本发明进一步的描述,所述步骤3中,变道策略决策模块基于车道的风险等级划分进行决策动作,所述决策动作包括触发变道策略、抑制变道、不触发变道策略;
24、其中,自车车道的风险等级高于旁侧车道的风险等级,触发变道策略;
25、自车车道的风险等级等于旁侧车道的风险等级,不触发变道策略;
26、自车车道的风险等级低于旁侧车道的风险等级,进行抑制变道。
27、作为本发明进一步的描述,所述步骤4中,仿真测试与验证模块输入实际道路中遇到的锥桶以及过去遇到的场景,并进行测试,比较同一场景下,不同缓冲距离时,自车在车道的通过率,获得最优缓冲距离阈值。
28、一种车辆,该车辆通过设置上述系统,并执行上述的变道方法。
29、相对于现有技术,本发明的技术效果为:
30、本发明提供了一种用于锥桶封路场景的自动驾驶变道方法及车辆,该方法的系统包括数据获取模块、锥桶风险评估模块、变道策略决策模块、仿真测试与验证模块,根据数据获取模块获取的信息,通过锥桶风险评估模块进行决策各车道的风险评估,并进行车道的风险等级划分,基于车道间的相对风险,通过变道策略决策模块对自动驾驶车辆进行决策动作,通过仿真测试与验证模块,结合实际路段测试,进行验证自动驾驶车辆的决策,并进行迭代优化自动驾驶车辆决策过程中的参数,以类人的方式并结合自车行驶过程中各车道间的相对风险,进行决策自车的行驶,避免自车出现画龙,并提高车辆的行车安全性,避免自车刹停在锥桶前,提高车辆的运行效率。
技术特征:
1.一种用于锥桶封路场景的自动驾驶变道方法,其特征在于:该方法的系统包括数据获取模块、锥桶风险评估模块、变道策略决策模块、仿真测试与验证模块;
2.根据权利要求1所述的一种用于锥桶封路场景的自动驾驶变道方法,其特征在于:所述步骤1中,车辆在驾驶场景下的基本信息包括:自车位置、速度、转向灯状态及周围的障碍物位置信息;
3.根据权利要求2所述的一种用于锥桶封路场景的自动驾驶变道方法,其特征在于:所述步骤2中,锥桶风险评估模块针对各车道的风险评估为,根据自车需要的横向通行空间,和车道实际剩余的横向通行空间,判断每条车道是否能够通行,包括如下步骤:
4.根据权利要求3所述的一种用于锥桶封路场景的自动驾驶变道方法,其特征在于:所述车道风险等级包括高风险、中风险、低风险;
5.根据权利要求1所述的一种用于锥桶封路场景的自动驾驶变道方法,其特征在于:所述步骤3中,变道策略决策模块基于车道的风险等级划分进行决策动作,所述决策动作包括触发变道策略、抑制变道、不触发变道策略;
6.根据权利要求3所述的一种用于锥桶封路场景的自动驾驶变道方法,其特征在于:所述步骤4中,仿真测试与验证模块输入实际道路中遇到的锥桶以及过去遇到的场景,并进行测试,比较同一场景下,不同缓冲距离时,自车在车道的通过率,获得最优缓冲距离阈值。
7.一种车辆,其特征在于,该车辆通过设置上述系统,并执行权利要求1-6任一项所述的变道方法。
技术总结
本发明公开一种用于锥桶封路场景的自动驾驶变道方法及车辆,该方法的系统包括数据获取模块、锥桶风险评估模块、变道策略决策模块、仿真测试与验证模块,根据数据获取模块获取的信息,通过锥桶风险评估模块进行决策各车道的风险评估,并进行车道的风险等级划分,基于车道间的相对风险,通过变道策略决策模块对自动驾驶车辆进行决策动作,通过仿真测试与验证模块,结合实际路段测试,进行验证自动驾驶车辆的决策,并进行迭代优化自动驾驶车辆决策过程中的参数,以类人的方式并结合自车行驶过程中各车道间的相对风险,进行决策自车的行驶,避免自车出现画龙,并提高车辆的行车安全性,避免自车刹停在锥桶前,提高车辆的运行效率。
技术研发人员:缪怡雯,张显宏,衡量
受保护的技术使用者:上海友道智途科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!