一种基于物联网的新能源汽车智能控制系统的制作方法
本发明涉及汽车控制,具体涉及一种基于物联网的新能源汽车智能控制系统。
背景技术:
1、新能源汽车是指采用非常规的车用燃料作为动力来源,综合车辆的动力控制和驱动方面的先进技术,形成的技术原理先进、具有新技术、新结构的汽车。新能源汽车包括纯电动汽车、增程式电动汽车、混合动力汽车、燃料电池电动汽车、氢发动机汽车等。混合动力汽车是指驱动系统由两个或多个能同时运转的单个驱动系联合组成的车辆,车辆的行驶功率依据实际的车辆行驶状态由单个驱动系单独或共同提供。
2、新能源汽车中的混合动力汽车的操作方式以及车辆的响应程度等,相对于常规车辆都存在较大的差别。部分从常规车辆替换为新能源汽车的老司机,面对操作性具有明显差异的车辆,需要经过一段时间的磨合才能达到之前的流畅操作。
3、但是在司机驾驶新能源汽车的磨合过程中,难以一开始就做到对新能源汽车的精准控制,而且往常驾驶常规车辆的部分经验可能也并不适用。所以,在一些对车速有要求的路段,因为司机无法做到对车辆的精准控制,往往会超速,从而导致交通事故发生的概率增加。
技术实现思路
1、本发明的目的在于提供一种基于物联网的新能源汽车智能控制系统,解决上述技术问题。
2、本发明的目的可以通过以下技术方案实现:
3、一种基于物联网的新能源汽车智能控制系统,包括:
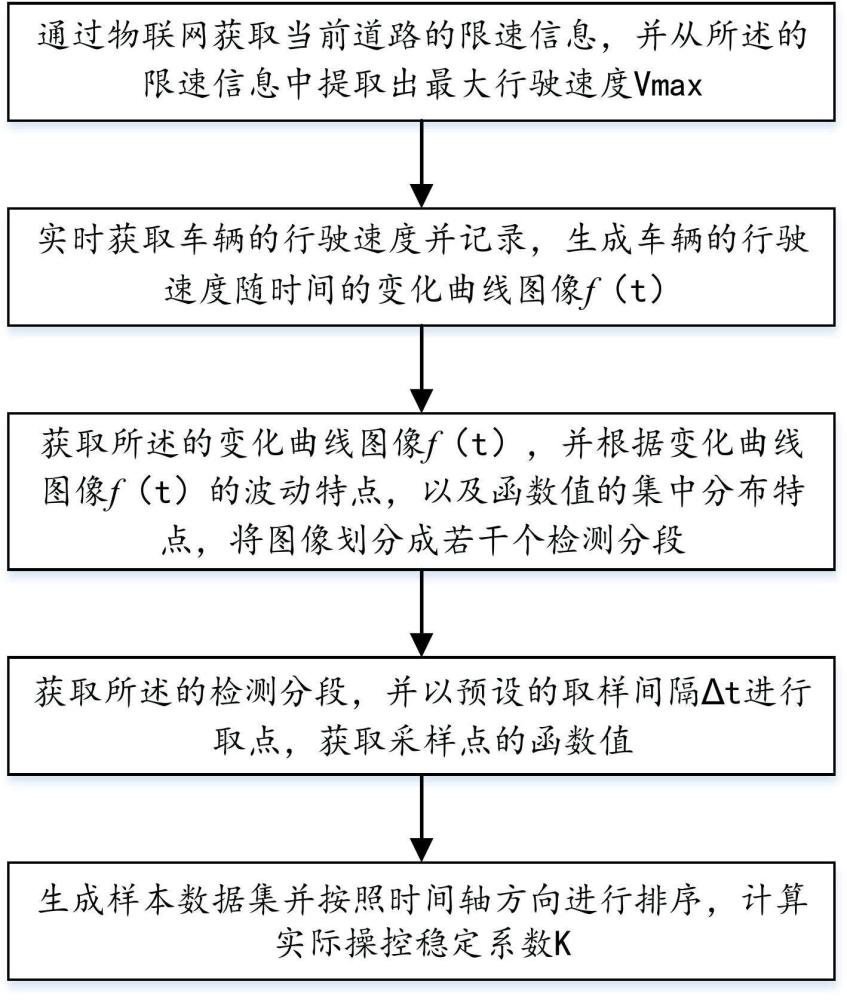
4、信号收集模块:通过物联网获取当前道路的限速信息,并从所述的限速信息中提取出最大行驶速度vmax;
5、车速监控模块:实时获取车辆的行驶速度并记录,生成车辆的行驶速度随时间的变化曲线图像 f(t);
6、数据预处理模块:获取所述的变化曲线图像 f(t),并根据变化曲线图像 f(t)的波动特点,以及函数值的集中分布特点,将图像划分成若干个检测分段,每个检测分段内的函数值位于区间(vave-δv,vave+δv),其中δv表示预设的可允许波动误差,vave表示该检测分段的函数值的平均值;
7、可靠性分析模块:获取所述的检测分段,并以预设的取样间隔δt进行取点,获取采样点的函数值,生成样本数据集并按照时间轴方向进行排序,计算实际操控稳定系数k,其计算方法为:
8、;
9、其中,si表示第i个样本数据集的方差,λ表示预设的修正系数;
10、当所述的实际操控稳定系数k大于预设的操控阈值时,获取所述的检测分段中的最大偏差值δv',调整最大行驶速度vmax'=vmax-|δv'|,并对用户进行播报提醒。
11、作为本发明进一步的方案:在所述的数据预处理模块中,获取分段的方法具体包括以下步骤:
12、获取所述的变化曲线图像 f(t);
13、计算分界线g(t)=t',将所述的变化曲线图像 f(t)划分为若干段,所述的分界线满足如下约束:
14、| f(t')- f(t'+δt)|≥2δv;
15、根据分界线,将所述的变化曲线图像 f(t)划分为若干个初始分段;
16、计算所述的初始分段中的极差vc=max f(t)-min f(t),并筛选出vc≤2δv的初始分段作为处理分段,其中max f(t)表示初始分段中的最大值,min f(t)表示初始分段中的最小值;
17、计算所述的处理分段的平均值vave',当所述的处理分段的函数值都位于区间(vave'-δv,vave'+δv)时,则判定当前的处理分段为检测分段。
18、作为本发明进一步的方案:在所述的可靠性分析模块中,当所述的样本数据集中样本的数量低于预设的最小样本数时,则删除该样本数据集。
19、作为本发明进一步的方案:在所述的数据预处理模块中,当所述的处理分段的函数值不全位于区间(vave'-δv,vave'+δv)时,调整所述的处理分段的定义域,直至调整后的处理分段的函数值都位于区间(vave'-δv,vave'+δv)内,并将调整后的处理分段判定为处理分段。
20、作为本发明进一步的方案:调整所述的处理分段的定义域的具体方法为:
21、缩短所述的处理分段的定义域两端的长度;
22、调整方法包括:从定义域两端向中间移动、从定义域的一端向另一端移动。
23、作为本发明进一步的方案:在所述的可靠性分析模块中,当所述的实际操控稳定系数k小于等于预设的操控阈值时,则不做调整,直接以最大行驶速度vmax进行播报提醒。
24、作为本发明进一步的方案:当满足要求的样本数据集的总数量低于预设数量时,则直接调整最大行驶速度vmax'=vmax-δv,并对用户进行播报提醒。
25、作为本发明进一步的方案:当所述的初始分段的中的极差vc≤2δv,且max f(t)或min f(t)为所述的初始分段的端点时,则舍弃该端点,重新计算极差vc。
26、本发明的有益效果:在日常的行驶过程中,不同的道路一般都有限速要求的,这些信息通过物联网实现车辆和交通基础设施之间的通信来得到;而且在具体的车辆行驶过程中,司机多会将车速保持在与限速差不多的速度进行行驶;但是在本发明的应用场景中,司机还无法做到对车辆的精准控制,因此司机主观的想要将车速保持在与限速差不多的时候,在实际驾驶过程中往往会产生较大的波动,在波动的过程中就有可能会发生超速,从而增加交通事故的风险;
27、为了应对上述问题,在本发明中,对车辆的行驶状态进行实时监控,从而获取车辆的行驶速度随时间的变化曲线;并从中截取特定的检测分段,从而分析司机在固定行驶速度区间内,车速的波动情况,从而反映出司机对应车辆车速的驾驶把控程度;从而根据分析结果灵活调整限速标准并对司机进行提醒,从而预防司机驾驶过程中因为操作不熟练导致的超速问题。
技术特征:
1.一种基于物联网的新能源汽车智能控制系统,其特征在于,包括:
2.根据权利要求1所述的一种基于物联网的新能源汽车智能控制系统,其特征在于,在所述的数据预处理模块中,获取分段的方法具体包括以下步骤:
3.根据权利要求1所述的一种基于物联网的新能源汽车智能控制系统,其特征在于,在所述的可靠性分析模块中,当所述的样本数据集中样本的数量低于预设的最小样本数时,则删除该样本数据集。
4.根据权利要求2所述的一种基于物联网的新能源汽车智能控制系统,其特征在于,在所述的数据预处理模块中,当所述的处理分段的函数值不全位于区间(vave'-δv,vave'+δv)时,调整所述的处理分段的定义域,直至调整后的处理分段的函数值都位于区间(vave'-δv,vave'+δv)内,并将调整后的处理分段判定为处理分段。
5.根据权利要求4所述的一种基于物联网的新能源汽车智能控制系统,其特征在于,调整所述的处理分段的定义域的具体方法为:
6.根据权利要求1所述的一种基于物联网的新能源汽车智能控制系统,其特征在于,在所述的可靠性分析模块中,当所述的实际操控稳定系数k小于等于预设的操控阈值时,则不做调整,直接以最大行驶速度vmax进行播报提醒。
7.根据权利要求3所述的一种基于物联网的新能源汽车智能控制系统,其特征在于,当满足要求的样本数据集的总数量低于预设数量时,则直接调整最大行驶速度vmax'=vmax-δv,并对用户进行播报提醒。
8.根据权利要求2所述的一种基于物联网的新能源汽车智能控制系统,其特征在于,当所述的初始分段的中的极差vc≤2δv,且maxf(t)或minf(t)为所述的初始分段的端点时,则舍弃该端点,重新计算极差vc。
技术总结
本发明涉及汽车控制技术领域,具体公开了一种基于物联网的新能源汽车智能控制系统,包括:信号收集模块:通过物联网获取当前道路的限速信息;车速监控模块:生成车辆的行驶速度随时间的变化曲线图像f(t);数据预处理模块:获取所述的变化曲线图像f(t),将图像划分成若干个检测分段;可靠性分析模块:获取所述的检测分段,并以预设的取样间隔Δt进行取点,获取采样点的函数值,生成样本数据集并按照时间轴方向进行排序,计算实际操控稳定系数K;当所述的实际操控稳定系数K大于预设的操控阈值时,调整最大行驶速度,并对用户进行播报提醒。本发明可以预防司机驾驶过程中因为操作不熟练导致的超速问题。
技术研发人员:朱万明,聂亦能,汤威,刘旭程
受保护的技术使用者:中印云端(深圳)科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!