一种双模式特种机器人的制作方法
本发明涉及机器人,具体地,涉及一种双模式特种机器人。
背景技术:
1、近年来,智能机器人技术进步飞速,作为智能机器人的一大类,特种作业机器人也得以快速发展和广泛应用,当下,特种作业机器人已在农业、电力、物流、安防与救援、军用、矿业、市政工程等领域中得以应用。
2、为了扩宽特种作业机器人对环境的适应性,当前不少企业和研发人员已尝试设计具备多运动模式的特种作业机器人,以飞行和行走两种模式的特种作业机器人为例,现有的这种特种作业机器人的飞行和行走的切换存在结构复杂、操作不便等问题,降低了机器人使用的稳定性和可靠性。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明实施例提出一种双模式特种机器人,该双模式特种机器人兼具飞行和行走的功能,且整体结构简单、稳定可靠,不同模式之间切换方便,充分满足了不同模式和姿态的使用需要。
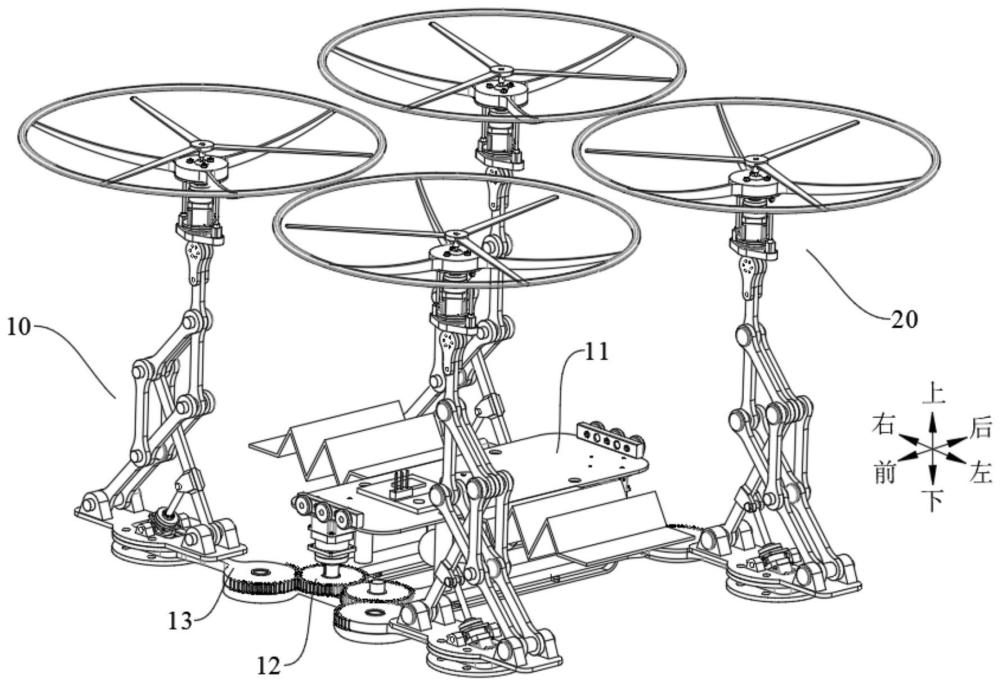
3、本发明实施例的双模式特种机器人,具有飞行模式和行走模式并包括;
4、座体和驱动齿轮,所述驱动齿轮转动装配于所述座体;
5、转向臂和机架,所述转向臂的一端与所述座体转动装配并与所述驱动齿轮啮合,且所述驱动齿轮用于驱使所述转向臂转动,所述机架固定于所述转向臂的另一端;
6、连杆机构和连杆驱动,所述连杆机构固定于所述机架,所述机座固定于所述连杆机构的自由端,所述连杆机构具有处于飞行模式的飞行状态和处于行走模式的行走状态,在所述飞行状态,所述连杆机构将所述旋翼和所述轮组的轴向调至竖直,在所述行走状态,所述连杆机构将所述旋翼和所述轮组的轴向调至水平,所述连杆驱动装配于所述机架和所述连杆机构之间并用于驱使所述连杆机构切换至所述飞行状态或行走状态;
7、机座和第一驱动,所述机座固定于所述第四连杆的自由端,所述第一驱动设于所述机座并包括输出轴;
8、旋翼,所述旋翼与所述输出轴相连,所述第一驱动用于驱使所述旋翼转动以在飞行模式时驱使特种机器人飞行;
9、轮组,所述轮组可滑移地套设于所述输出轴的外周侧并具有传动位和分离位,在所述传动位,所述轮组与所述输出轴啮合以在行走模式时驱使所述轮组在地面滚动,在所述分离位,所述轮组和所述输出轴分离;
10、第二驱动,所述第二驱动转动装配于所述机座的外周侧,所述第二驱动与所述轮组相连并用于驱使所述轮架在所述传动位和所述分离位之间切换。
11、在一些实施例中,所述轮组包括轮架和轮圈,所述轮圈固定在所述轮架的外周侧,所述轮圈与所述旋翼同轴布置;
12、在所述飞行模式,所述轮圈环绕在所述旋翼的外周侧,且所述旋翼转动,所述轮组不转动;在所述行走模式,所述轮圈和所述旋翼在所述输出轴的轴向上错位布置,且轮圈相对于所述旋翼邻近所述机座,所述轮圈和所述旋翼均转动。
13、在一些实施例中,所述轮组包括:
14、壳体,所述壳体设于所述轮架的中心位置,所述壳体套设于所述输出轴的外周侧并沿着所述输出轴的轴向位置可调;
15、中心齿轮,所述中心齿轮套设于所述输出轴的外周侧并沿着所述输出轴的轴向位置可调,且在所述行走模式,所述轮组通过所述中心齿轮与所述啮合部啮合配合;
16、齿圈,所述齿圈固定于所述壳体内,且所述齿圈环绕在所述中心齿轮的外周侧;
17、多个行星轮,多个所述行星轮啮合装配在所述中心齿轮和所述齿圈之间并沿着所述中心齿轮的周向间隔排布。
18、在一些实施例中,包括第一轴承,所述中心齿轮内设有环形的台阶槽,所述第一轴承嵌设于所述台阶槽内,且所述第一轴承的外圈与所述中心齿轮固定相连,所述第一轴承的内圈套设于所述输出轴的外周侧并沿着所述输出轴的轴向可滑移;
19、所述壳体包括在所述输出轴的轴向上相对布置的第一壳和第二壳,所述第二壳位于所述第一壳和所述旋翼之间,所述第二驱动与第一壳铰接,所述第二壳一体成型于所述轮架,所述齿圈固定于所述第二壳内,所述台阶槽的槽口朝向所述第二壳;
20、所述第一壳的中心设有环绕在所述输出轴的外周侧的第一环形部,所述第一环形部向所述中心齿轮延伸,所述中心齿轮朝向所述第一壳的端面上设有环槽,所述第一环形部嵌设于所述环槽内,所述第二壳的中心设有环绕在所述输出轴的外周侧的第二环形部,所述第二环形部向所述中心齿轮延伸,且所述第二环形部与所述第一轴承的内圈止抵。
21、在一些实施例中,包括环形密封件,所述第一壳设有第三环形部,所述第三环形部环绕在所述第一环形部的外周侧,所述第三环形部伸入所述第二壳内并与所述第二壳的内周壁贴合,所述环形密封件设于所述第二壳内并环绕在所述输出轴的外周侧,且所述环形密封件夹紧固定在所述第三环形部和所述齿圈之间;
22、和/或,所述轮组包括多个固定轴,多个所述固定轴均与所述第二壳相连,并沿着所述中心齿轮的周向间隔排布,多个所述行星轮一一对应的转动装配于多个所述固定轴的外周侧,每个所述行星轮的相对布置的两个端面上均设有装配槽,所述行星轮的两个所述装配槽内均装配有第二轴承,所述固定轴穿过所述第二轴承,且所述第二轴承夹紧限位在所述固定轴的端头和所述行星轮之间或夹紧限位在所述行星轮和所述第二壳之间。
23、在一些实施例中,包括第三轴承和转动座,所述第三轴承套设在所述机座的外周侧,所述机座的外周侧设有挡环,所述第三轴承的内圈限位在所述挡环和所述机座的轴肩之间,所述转动座固定于所述第三轴承的外圈的外周侧,所述第二驱动可伸缩并设有多个,多个所述第二驱动沿着所述输出轴的周向间隔布置,且每个所述第二驱动的一端均与所述转动座相连,每个所述第二驱动的另一端均与所述壳体铰接。
24、在一些实施例中,所述连杆机构包括第一连杆、第二连杆、第三连杆、第四连杆和第五连杆,所述第一连杆的一端和所述第二连杆的一端均与所述机架转动相连,所述第三连杆的一端与所述第一连杆的另一端转动相连,所述第三连杆的另一端与所述第二连杆的中部转动相连,所述第四连杆的一端与所述第二连杆的另一端转动相连,所述第四连杆的另一端用于与动力转换装置相连,所述第五连杆的一端与所述第一连杆和所述第三连杆的连接处转动相连,所述第五连杆的另一端与所述第四连杆的中部转动相连。
25、在一些实施例中,所述第二连杆和所述第五连杆平行布置,所述第三连杆和所述第四连杆平行布置,所述第三连杆和所述第四连杆之间的所述第二连杆的长度尺寸与所述第五连杆的长度尺寸一致,所述第二连杆和所述第五连杆之间的所述第四连杆的长度尺寸与所述第三连杆的长度尺寸一致,所述第三连杆的长度尺寸和所述第五连杆的长度尺寸相同。
26、在一些实施例中,所述第二连杆、所述第三连杆、所述第五连杆均并行间隔布置有两个,所述第一连杆位于两个所述第二连杆之间并转动装配在两个所述第五连杆之间,所述第四连杆转动装配在两个所述第二连杆之间和两个所述第五连杆之间,两个所述第二连杆和两个所述第五连杆均转动装配在两个所述第三连杆之间。
27、在一些实施例中,包括转动驱动,所述转动驱动设于所述座体,所述驱动齿轮设有两个,两个所述驱动齿轮啮合并均转动装配于所述座体,所述转动驱动与一个所述驱动齿轮相连并通过驱使一个所述驱动齿轮转动实现两个所述驱动齿轮的同步转动,且每个所述驱动齿轮均传动装配有所述转向臂、所述机架、所述连杆机构;
28、和/或,包括起落架和弹性件,所述起落架设于所述座体的底侧,所述起落架可柔性变形,所述弹性件设于所述起落架和所述座体之间,且所述弹性件可弹性变形以缓冲所述起落架着地时受到的冲击。
29、有益效果:本发明实施例的双模式特种机器人兼具飞行和行走的功能,且整体结构简单、稳定可靠,不同模式之间切换方便,充分满足了不同模式和姿态的使用需要。
- 还没有人留言评论。精彩留言会获得点赞!