一种电动物流车的安全控制系统及方法与流程
本发明涉及汽车安全控制,提供了一种电动物流车的安全控制系统及方法。
背景技术:
1、近年来,随着我国经济的高速发展以及人们生活水平的逐渐提高,汽车作为主要的代步工具,其普及数量已经非常之多,由此也造成了石油等传统燃料的大量消耗和生态环境的严重破坏。
2、在这种情况下,人们开始将目光放在了新能源的开发与研究上,与传统汽车相比,能源汽车在各方面都具有明显优势,已成为未来汽车发展的主要方向,其已经广泛用于家用驾乘及物流运输。
3、目前新能源电动汽车采用永磁驱动电机作为动力输出,存在超强的加速动力及高速大扭矩特性,然而优异的动力性能也会因驾驶行为和环境因素等对控制带来一定的安全隐患。若车辆行驶中出现车辆刹车失灵等现象,可能导致严重的车辆事故。
技术实现思路
1、鉴于此,本申请提供一种电动物流车的安全控制方法,旨在提高电动物流城行驶过程中的安全性。
2、具体而言,包括以下的技术方案:
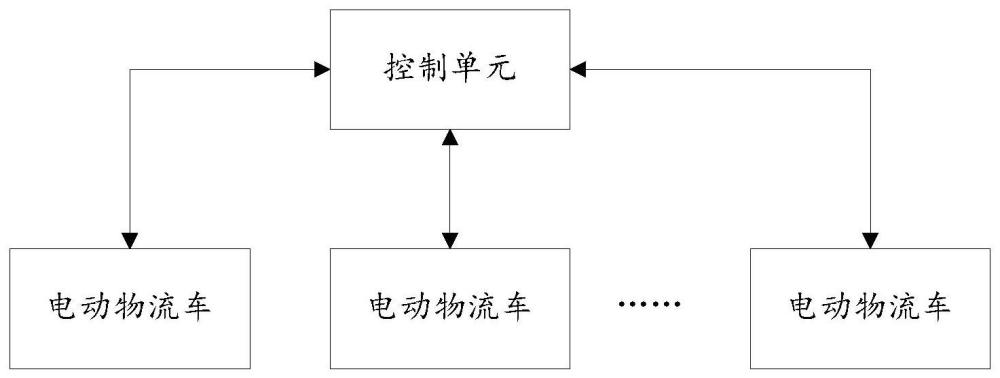
3、一方面,本申请实施例提供了一种电动物流车的安全控制系统,所述系统包括:
4、设于货物运送区域内的多辆电动物流车,货物运送区域内存在至少一条双向行驶的车道,所有的电动物流车与控制单元无线通讯连接;
5、每辆电动物流车包括:驱动底盘,及设于驱动底盘上的金属货箱,金属货箱的金属内均匀的掺入可充磁物质;
6、无人驾驶系统,集成于驱动底盘上,无人驾驶系统控制驱动底盘在设定的货物运送区域内运动,将货物运送至货物运送区域内的目标位置;
7、电机控制器,与驱动电机通过硬线通讯连接,电机控制器控制驱动电机对金属货箱进行pwm高频谐波注入,以使金属货箱内的可充磁物质产生磁性。
8、在一些实施例中,可充磁物质为铁氧体材料。
9、另一方面,本申请实施例提供了一种基于上述电动物流车的安全控制系统的电动物流车安全控制方法,具体如下:
10、本车在行驶过程中,若检测到与其他电动物流车存在碰撞风险时,控制本车及其他电动物流车进行充磁,以降低两者时间的碰撞风险。
11、在一些实施例中,若存在碰撞风险的其他车辆位于本车的前方,则电动物流车的控制方法具体如下:
12、将本车所在车道前方距本车最近的其他电动物流车作为目标车辆,实时检测目标车辆距本车的距离是否小于预警距离,若检测结果为是,且两者相向行驶,此时本车及目标车辆的自动驾驶系统会进行减速或制动操作,控制单元向本车和目标车辆发送充磁指令,同时向优先级低的车辆发出避障指令,低优先级车辆的自动驾驶系统基于避障指令进行变道操作,在变道完成后,控制单元向本车及目标车辆发送充磁停止指令。
13、在一些实施例中,若目标车辆与本车的行驶方向相同,本车及目标车辆的自动驾驶系统在进行减速或制动同时,控制单元向本车和目标车辆发送充磁指令,在目标车辆距本车的距离大于预警距离时,控制单元向本车及目标车辆发送充磁停止指令。
14、在一些实施例中,基于目标物流车运送货物的紧急程度来确定本车和目标车辆的优先级,或者是基于本车及目标车辆距目标位置的距离来确定优先级。
15、在一些实施例中,若目标车辆位于本车的左侧,则电动物流车的控制方法具体如下:
16、检测本车所在车道的相邻左侧车道内是否存在其他电动物流车,若检测结果为是,将相邻左侧车道内距本车最近的其他电动物流车作为目标车辆,实时监测目标车辆距本车的横向距离,若横向距离小于预警距离,则控制单元向本车及目标车辆发送充磁指令,在目标车辆距本车的纵向距离大于预警距离时,控制单元向本车及目标车辆发送充磁停止指令。
17、在一些实施例中,在电动物流车达到物运送区域内的目标位置时,将对应电动物流车的状态变更为锁定状态。
18、在一些实施例中,处理单元向处于非锁定态的电动物流出发送充磁指令及充磁停止指令。
19、在两个电动物流车存在碰撞风险时,通过向两车的金属车厢引入相同的磁性,两车距离越近,两车之间的排斥力越大,以此辅助自动驾驶系统来降低两车的碰撞风险,此外,即使电动物流车出现刹车失灵时,也能降低车的碰撞风险。
技术特征:
1.一种电动物流车的安全控制系统,其特征在于,所述系统包括:
2.如权利要求1所述电动物流车的安全控制系统,其特征在于,可充磁物质为铁氧体材料。
3.基于权利要求1或2所述电动物流车的安全控制系统的电动物流车安全控制方法,其特征在于,所述方法具体如下:
4.基于权利要求3所述的电动物流车安全控制方法,其特征在于,若存在碰撞风险的其他车辆位于本车的前方,则电动物流车的控制方法具体如下:
5.如权利要求4所述的电动物流车安全控制方法,其特征在于,若目标车辆与本车的行驶方向相同,本车及目标车辆的自动驾驶系统在进行减速或制动同时,控制单元向本车和目标车辆发送充磁指令,在目标车辆距本车的距离大于预警距离时,控制单元向本车及目标车辆发送充磁停止指令。
6.基于权利要求4所述的电动物流车安全控制方法,其特征在于,基于目标物流车运送货物的紧急程度来确定本车和目标车辆的优先级,或者是基于本车及目标车辆距目标位置的距离来确定优先级。
7.基于权利要求3所述的电动物流车安全控制方法,其特征在于,若目标车辆位于本车的左侧,则电动物流车的控制方法具体如下:
8.基于权利要求3所述的电动物流车安全控制方法,其特征在于,在电动物流车达到物运送区域内的目标位置时,将对应电动物流车的状态变更为锁定状态。
9.基于权利要求8所述的电动物流车安全控制方法,其特征在于,处理单元向处于非锁定态的电动物流出发送充磁指令及充磁停止指令。
技术总结
本发明提供了一种电动物流车的安全控制系统,包括:设于货物运送区域内的多辆电动物流车,与控制单元通讯连接,货物运送区域内存在至少一条双向行驶的车道;电动物流车包括:驱动底盘,及设于驱动底盘上的金属货箱,金属货箱的金属内均匀的掺入可充磁物质;无人驾驶系统,集成于驱动底盘上,无人驾驶系统控制驱动底盘的运动,将货物运送至货物运送区域内的目标位置;电机控制器,与驱动电机通讯连接,控制驱动电机对金属货箱进行pwm高频谐波注入,以使金属货箱内的可充磁物质产生磁性。在两个电动物流车存在碰撞风险时,通过向两车的金属车厢引入相同的磁性,两车距离越近,两车之间的排斥力越大,以此辅助自动驾驶系统来降低两车的碰撞风险。
技术研发人员:陈茜兵,高东洋,何孝祥,王栋,程仁恒
受保护的技术使用者:芜湖泰瑞汽车有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!