一种ABS+ASR与ECAS联合控制实现驱动防滑的方法与流程
本发明涉及车辆控制领域,具体涉及一种abs+asr与ecas联合控制实现驱动防滑的方法。
背景技术:
1、目前的车辆控制系统有abs系统,其充分发挥制动器的效能,缩短制动时间和距离;能有效防止车辆紧急制动时打滑和甩尾,行驶稳定性好;能在紧急制动时转弯,具有良好的转向机动性;可以避免轮胎与地面的剧烈摩擦,减少轮胎的磨损,制动时,abs可以根据来自各个轮速传感器的速度信号,快速判断车轮的抱死状态,并关闭开始抱死的车轮上的常开输入电磁阀,使制动力保持不变;有asr系统,其是在驱动轮打滑时asr通过对比各轮子转速,电子系统判断出驱动轮打滑,自动立刻减少节气门进气量,降低引擎转速,从而减少动力输出,对打滑的驱动轮进行制动;还有ecas系统,其由ecas电控单元、电磁阀、高度传感器、气囊等部件组成,高度传感器负责检测车辆高度的变化,电控单元将接受输入信息,判断当前车辆状态,激发电磁阀工作,电磁阀实现对各个气囊的充放气调节。
2、目前驱动防滑控制策略都是单一的通过制动车轮的速度来实现,这种控制方法存在控制效果不佳的问题,如专利号cn201710264411.5公开了一种基于abs/asr的车辆自动紧急制动系统,电子控制单元来调节abs电磁阀实现防滑,但这种结构不能完全达到防滑效果。
技术实现思路
1、本发明要解决的技术问题是提供一种abs+asr与ecas联合控制实现驱动防滑的方法,其通过abs+asr与ecas联合控制,来改变打滑轮的载荷,从而实现双重防滑。
2、为解决上述问题,本发明采用如下技术方案:一种abs+asr与ecas联合控制实现驱动防滑的方法,包括以下步骤:
3、步骤一、abs+asr控制器外部触发的方式采集轮速传感器,并根据轮速传感器传递的脉冲信号来计算车辆的每个轮子的车速信号;
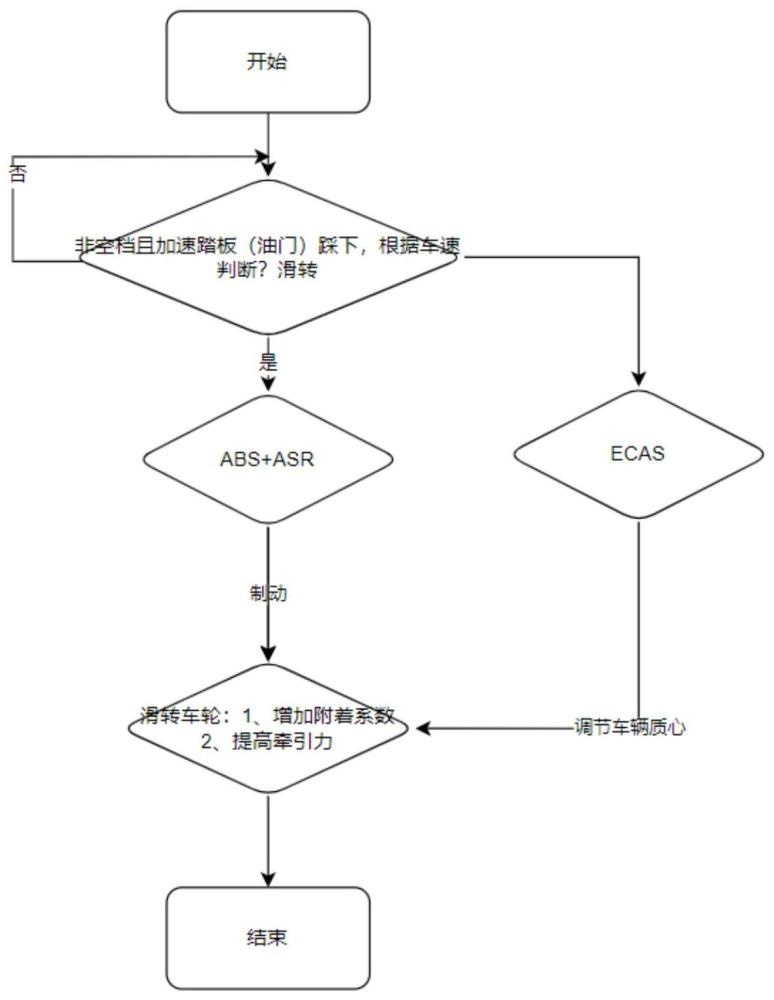
4、步骤二、abs+asr控制器在整车处于非空挡且加速踏板不为零情况下,根据驱动轮车速与从动轮车速之间的差值来判断当前车辆是否处于滑转(打滑),单一驱动轮滑转还是多驱动轮滑转;
5、步骤三、abs+asr控制模块通过对滑转车轮施以制动力或控制发动机的动力输出来增加汽车的牵引力;
6、步骤四、ecas控制器接收到abs+asr发送出来的车轮滑转信息,自动调整整车的车身高度,即ecas升降车身,改变车辆的质心位置,从而来调节滑转车轮所承受的载荷重量,使滑转车轮承受更多的载荷,从而增加滑转车轮与地面的附着系数(摩擦系数),从而增加车轮的牵引力实现防滑。
7、在步骤一中,车轮周长=轮胎直径(0.625m)*π,π取3.14,每分钟车轮转速(rpm)=60/48*传感器信号的频率,其中传感器信号的频率为轮速传感器发出,由abs+asr控制器采集,车速(km/小时)=每分钟车轮转速*车轮周长*60/1000。
8、进一步的技术方案为,在步骤二中,abs+asr控制器在车辆处于非空挡且加速踏板踩下(油门)情况下,比较左右驱动轮与从动轮之间的车速差,公式为|vqx—vcx|,其中q代表驱动,x代表左轮或右轮,c代表从动轮,v代表速度。
9、进一步的技术方案为,在步骤四中,ecas对车身高度的调节来改变车辆的质心位置以及来改变驱动轴荷的大小,ecas系统根据车身高度传感器自动识别车身高度变化量δh=|h左-h右|。
10、进一步的技术方案为,ecas系统根据气囊压力传感器计算出当前车辆的载荷。
11、进一步的技术方案为,不同δh下载荷变化是个标定量。
12、进一步的技术方案为,摩擦系数与载荷成正相关性即随着载荷的增加,摩擦系数也增加。
13、进一步的技术方案为,牵引力计算公式为f=μt*w,即作用在车轮上的牵引力=车轮摩擦系数*车轮(车轴)上承载的载荷重量。
14、本发明的有益效果是:
15、本发明abs+asr与ecas联合控制实现驱动防滑的方法,先采集轮速传感器计算出每个车轮车速,然后驱动轮车速与从动轮车速之间的差值判断是否打滑,然后对滑转车轮增加牵引力,最后ecas根据abs+asr发出的信号来改变车辆的质心位置,使滑转车轮承受更多的载荷,使得滑转车轮与地面增加附着系数,从而增加车轮的牵引力,最终车辆通过abs+asr与ecas联合控制来实现改变滑轮的载荷,从而实现双重防滑。
技术特征:
1.一种abs+asr与ecas联合控制实现驱动防滑的方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种abs+asr与ecas联合控制实现驱动防滑的方法,其特征在于:在步骤一中,车轮周长=轮胎直径*π,每分钟车轮转速=60/48*传感器信号的频率,其中传感器信号的频率为轮速传感器发出,由abs+asr控制器采集,车速=每分钟车轮转速*车轮周长*60/1000。
3.根据权利要求1所述的一种abs+asr与ecas联合控制实现驱动防滑的方法,其特征在于:在步骤二中,abs+asr控制器在车辆处于非空挡且加速踏板踩下情况下,比较左右驱动轮与从动轮之间的车速差,公式为|vqx—vcx|,其中q代表驱动,x代表左轮或右轮,c代表从动轮,v代表速度。
4.根据权利要求1所述的一种abs+asr与ecas联合控制实现驱动防滑的方法,其特征在于:在步骤四中,ecas对车身高度的调节来改变车辆的质心位置以及来改变驱动轴荷的大小,ecas系统根据车身高度传感器自动识别车身高度变化量δh=|h左-h右|。
5.根据权利要求4所述的一种abs+asr与ecas联合控制实现驱动防滑的方法,其特征在于:ecas系统根据气囊压力传感器计算出当前车辆的载荷。
6.根据权利要求4所述的一种abs+asr与ecas联合控制实现驱动防滑的方法,其特征在于:不同δh下载荷变化是个标定量。
7.根据权利要求4所述的一种abs+asr与ecas联合控制实现驱动防滑的方法,其特征在于:摩擦系数与载荷成正相关性即随着载荷的增加,摩擦系数也增加。
8.根据权利要求1所述的一种abs+asr与ecas联合控制实现驱动防滑的方法,其特征在于:在步骤四中,牵引力计算公式为f=μt*w,即作用在车轮上的牵引力=车轮摩擦系数*车轮上承载的载荷重量。
技术总结
本发明公开一种ABS+ASR与ECAS联合控制实现驱动防滑的方法,包括步骤一、ABS+ASR控制器采集轮速传感器,并根据脉冲信号来计算车辆的每个轮子的车速信号;步骤二、ABS+ASR控制器在整车处于非空挡且加速踏板不为零情况下,根据驱动轮与从动轮车速之间的差值来判断车辆是否处于滑转,单一还是多驱动轮滑转;步骤三、ABS+ASR控制模块通过对滑转车轮施以制动力或控制发动机的动力输出来增加汽车的牵引力;步骤四、ECAS控制器接收到ABS+ASR发送出来的车轮滑转信息,自动调整整车的车身高度和质心位置,从而调节滑转车轮所承受的载荷重量,使滑转车轮承受更多载荷,增加滑转车轮与地面附着系数,从而增加车轮牵引力,本发明通过ABS+ASR与ECAS联合控制,来改变滑轮的载荷,从而实现双重防滑。
技术研发人员:李少峰,金何锟,王剑平,李明哲,冯小凯,马阿龙,张文祥
受保护的技术使用者:武汉沃兴科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!