一种泊车控制方法、装置、车辆和存储介质与流程
本技术涉及车辆领域,并且更具体地,涉及车辆领域中一种泊车控制方法、装置、车辆和存储介质。
背景技术:
1、近年来,随着国内汽车数量的不断增加,停车拥挤问题成为困扰众多车主的一大难题,一些新手停车技术不成熟,往往造成车辆无法停入车位或者车辆虽停入停车位但造成与其他车辆发生剐蹭的事故。为了避免因车主技术不成熟而导致车辆受损,目前许多车辆中都配备自动泊车辅助功能,该功能主要依靠智能泊车技术。
2、但是,现有的智能泊车技术通常以停车位的划线或者基于车辆宽度自行泊入最中间的车位中,即与相邻的2个车位保持大致相等的距离。但在某些车位狭小的车位,当待泊入的车位与其左边或右边的相邻车位距离太近,可能会造成旁边车辆开门碰到自己的车辆,进而造成车门的刮擦、车门的碰撞凹痕,影响车辆的外观也给车主带来一定的损失。
技术实现思路
1、本技术提供了一种泊车控制方法、装置、车辆和存储介质,该方法能够提高自动泊车功能的智能性,减少因停车方式不合适引起的磕碰事件的发生,减少用户不必要的损失。
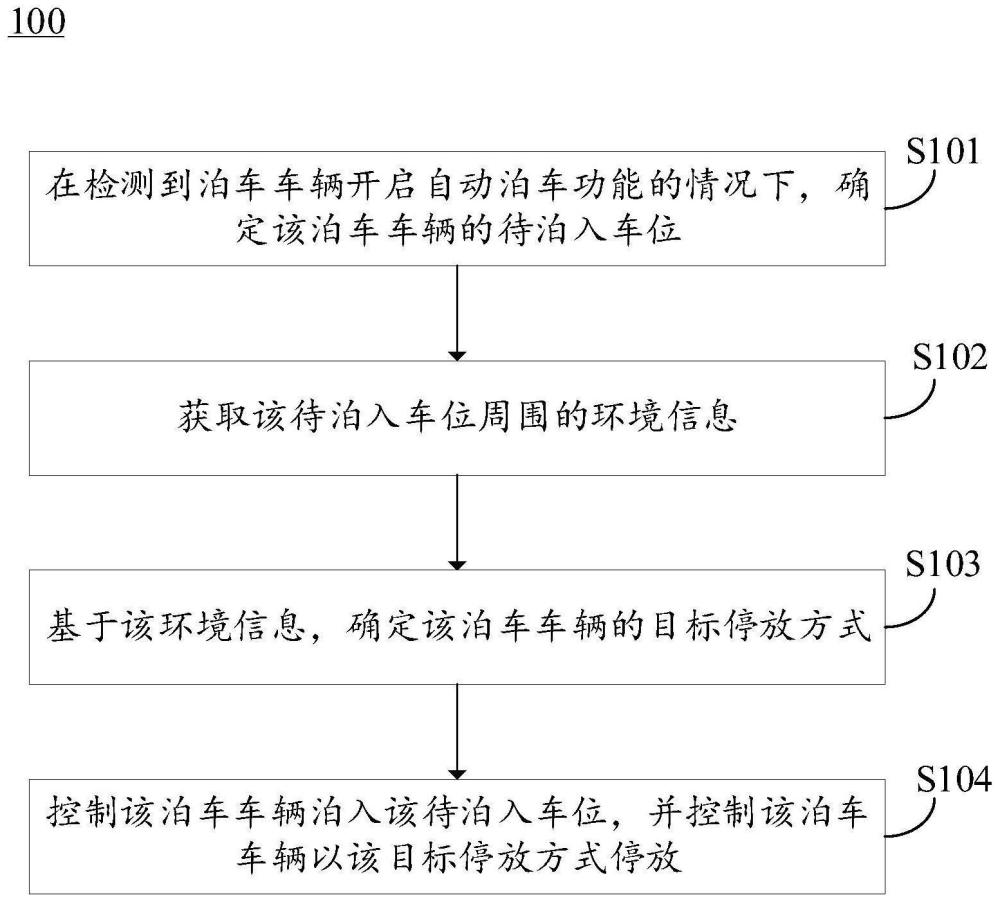
2、第一方面,提供了一种泊车控制方法,该方法包括:在检测到泊车车辆开启自动泊车功能的情况下,确定该泊车车辆的待泊入车位;获取该待泊入车位周围的环境信息;基于该环境信息,确定该泊车车辆的目标停放方式;控制该泊车车辆泊入该待泊入车位,并控制该泊车车辆以该目标停放方式停放。
3、上述技术方案,在检测到车辆开启自动泊车功能的情况下,确定泊车车辆的待泊入车位,然后获取该待泊入车位周围的环境信息,基于该环境信息,确定泊车车辆的目标停放方式,通过待泊入车位周围的环境信息可以获知该车位附近的情况,从而确定合适的目标停放方式,而不是直接控制泊车车辆居中停放在待泊入车位,本技术中确定合适的目标停放方式能够有效地提高自动泊车功能的智能性,减少因停车方式不合适引起的磕碰事件的发生,减少用户不必要的损失。
4、结合第一方面,在第一方面的某些实现方式中,该确定该泊车车辆的待泊入车位,包括:获取泊车车辆周围的空闲车位;其中,该空闲车位为该泊车车辆所处的停车场所中暂未停放车辆的车位;若确定该空闲车位中存在目标车位,则在该目标车位中选择该待泊入车位;其中,该目标车位为任意一侧车位边界线与立柱之间的垂直距离小于或等于第一预设距离的车位。
5、结合第一方面和上述实现方式,在第一方面的某些实现方式中,在该空闲车位中存在多个目标车位的情况下,该在该目标车位中选择该待泊入车位,包括:将该多个目标车位展示给该泊车车辆的用户,以供该用户在该多个目标车位中选择该待泊入车位;将该用户选择的车位确定为该待泊入车位。
6、上述技术方案,在获取泊车车辆周围的空闲车位之后,可以确定该空闲车位中是否存在靠近立柱的目标车位,如果存在靠近立柱的目标车位,则可以在该目标车位中选择待泊入车位。由于在泊车车辆停放在靠近立柱的车位时,泊车车辆可能会有一侧下车的空间较大,便于用户下车,所以在靠近立柱的目标车位中选择待泊入车位,能够为用户提供便利,提升自动泊车功能的智能性,提升用户的用车体验。并且在存在多个目标车位时,由用户在多个目标车位中选择待泊入车位,也可以提升用户与车辆的交互性,充分考虑到用户的选择,进一步提升用户的使用体验。
7、结合第一方面和上述实现方式,在第一方面的某些实现方式中,该环境信息包括立柱分布信息,该立柱分布信息包括该立柱与该待泊入车位之间的距离,在该基于该环境信息,确定该泊车车辆的目标停放方式之前,该方法还包括:确定该待泊入车位的车位类型;该基于该环境信息,确定该泊车车辆的目标停放方式,包括:在确定该车位类型为垂直车位的情况下,基于该立柱分布信息,确定该泊车车辆的目标停放方式。
8、结合第一方面和上述实现方式,在第一方面的某些实现方式中,该基于该立柱分布信息,确定该泊车车辆的目标停放方式,包括:在该待泊入车位的左侧车位边界线与该立柱的垂直距离小于或等于第一预设距离且该立柱不影响该泊车车辆开启左侧车门的情况下,确定该泊车车辆的目标停放方式包括:与该待泊入车位的左侧车位边界线平行停放且该泊车车辆的左侧车轮外侧与左侧车位边界线之间的垂直距离小于或等于第二预设距离;或;以小于或等于第一预设角度的倾斜角度倾斜停放在该待泊入车位中;其中,该倾斜角度为该泊车车辆的左侧车轮与该左侧车位边界线之间的夹角;在该待泊入车位的右侧车位边界线与该立柱的垂直距离小于或等于第一预设距离且该立柱不影响该泊车车辆开启右侧车门的情况下,确定该泊车车辆的目标停放方式包括:与该待泊入车位的右侧车位边界线平行停放且该泊车车辆的右侧车轮外侧与右侧车位边界线之间的垂直距离小于或等于第三预设距离;或;以小于或等于第二预设角度的倾斜角度倾斜停放在该待泊入车位中;其中,该倾斜角度为该泊车车辆的右侧车轮与该右侧车位边界线之间的夹角。
9、上述技术方案,确定该泊车车辆的目标停放方式可以是控制泊车车辆靠近立柱一侧与待泊入车位的车位边界线平行停放在该待泊入车位中,能够为泊车车辆的另一侧留出更大的下车空间,增大泊车车辆与其相邻车位的车辆之间的距离,避免因两车距离过近而导致车辆间产生磕碰。还可以是控制该泊车车辆倾斜停放在该待泊入车位中,可以降低该待泊入车位的相邻车位的车辆开门时与泊车车辆发生磕碰的概率。通过确定的上述目标停放方式能够进一步提升自动泊车功能的智能性,减少磕碰事件的发生,减少用户不必要的损失。
10、结合第一方面和上述实现方式,在第一方面的某些实现方式中,该方法还包括:展示确定的该泊车车辆的目标停放方式,以供该泊车车辆的用户选择;该控制该泊车车辆泊入该待泊入车位,并控制该泊车车辆以该目标停放方式停放,包括:控制该泊车车辆泊入该待泊入车位,并控制该泊车车辆以该用户选择的目标停放方式停放。
11、结合第一方面和上述实现方式,在第一方面的某些实现方式中,在该控制该泊车车辆泊入该待泊入车位,并控制该泊车车辆以该目标停放方式停放之后,该方法还包括:获取该泊车车辆以该目标停放方式停放的停放原因和该泊车车辆泊入该待泊入车位后的停放效果;展示该停放原因和该停放效果,以供该泊车车辆的用户知悉该停放原因和该停放效果。
12、上述技术方案,在控制该泊车车辆泊入该待泊入车位,并控制该泊车车辆以该目标停放方式停放之后,可以向泊车车辆的用户展示以该目标停放方式停放车辆的原因以及泊车车辆当前的停放效果,能够让该用户及时获知该停放原因和停放效果,避免泊车车辆的用户因车辆的停放方式不常规而误以为车辆的泊车功能故障。通过向用户展示车辆当前的停放效果,可以增强用户与车辆的交互感,提升用户的用车体验。
13、第二方面,提供了一种泊车控制装置,该装置包括:第一确定模块,用于在检测到泊车车辆开启自动泊车功能的情况下,确定该泊车车辆的待泊入车位;获取模块,用于获取该待泊入车位周围的环境信息;第二确定模块,用于基于该环境信息,确定该泊车车辆的目标停放方式;控制模块,用于控制该泊车车辆泊入该待泊入车位,并控制该泊车车辆以该目标停放方式停放。
14、结合第二方面,在第二方面的某些实现方式中,该第一确定模块具体用于:获取泊车车辆周围的空闲车位;其中,该空闲车位为该泊车车辆所处的停车场所中暂未停放车辆的车位;若确定该空闲车位中存在目标车位,则在该目标车位中选择该待泊入车位;其中,该目标车位为任意一侧车位边界线与立柱之间的垂直距离小于或等于第一预设距离的车位。
15、结合第二方面和上述实现方式,在第二方面的某些实现方式中,该第一确定模块包括确定单元,在该空闲车位中存在多个目标车位的情况下,该确定单元用于:将该多个目标车位展示给该泊车车辆的用户,以供该用户在该多个目标车位中选择该待泊入车位;将该用户选择的车位确定为该待泊入车位。
16、结合第二方面和上述实现方式,在第二方面的某些实现方式中,该环境信息包括立柱分布信息,该立柱分布信息包括该立柱与该待泊入车位之间的距离,该装置还包括第三确定模块,该第三确定模块用于:确定该待泊入车位的车位类型;该第二确定模块具体用于:在确定该车位类型为垂直车位的情况下,基于该立柱分布信息,确定该泊车车辆的目标停放方式。
17、结合第二方面和上述实现方式,在第二方面的某些实现方式中,该第二确定模块具体用于:在该待泊入车位的左侧车位边界线与该立柱的垂直距离小于或等于第一预设距离且该立柱不影响该泊车车辆开启左侧车门的情况下,确定该泊车车辆的目标停放方式包括:与该待泊入车位的左侧车位边界线平行停放且该泊车车辆的左侧车轮外侧与左侧车位边界线之间的垂直距离小于或等于第二预设距离;或;以小于或等于第一预设角度的倾斜角度倾斜停放在该待泊入车位中;其中,该倾斜角度为该泊车车辆的左侧车轮与该左侧车位边界线之间的夹角;在该待泊入车位的右侧车位边界线与该立柱的垂直距离小于或等于第一预设距离且该立柱不影响该泊车车辆开启右侧车门的情况下,确定该泊车车辆的目标停放方式包括:与该待泊入车位的右侧车位边界线平行停放且该泊车车辆的右侧车轮外侧与右侧车位边界线之间的垂直距离小于或等于第三预设距离;或;以小于或等于第二预设角度的倾斜角度倾斜停放在该待泊入车位中;其中,该倾斜角度为该泊车车辆的右侧车轮与该右侧车位边界线之间的夹角。
18、结合第二方面和上述实现方式,在第二方面的某些实现方式中,该装置还包括第一展示模块,该第一展示模块用于:展示确定的该泊车车辆的目标停放方式,以供该泊车车辆的用户选择;该控制模块具体用于:控制该泊车车辆泊入该待泊入车位,并控制该泊车车辆以该用户选择的目标停放方式停放。
19、结合第二方面和上述实现方式,在第二方面的某些实现方式中,该装置还包括第二展示模块,该第二展示模块具体用于:获取该泊车车辆以该目标停放方式停放的停放原因和该泊车车辆泊入该待泊入车位后的停放效果;展示该停放原因和该停放效果,以供该泊车车辆的用户知悉该停放原因和该停放效果。
20、第三方面,提供了一种车辆,包括存储器和处理器。该存储器用于存储可执行程序代码,该处理器用于从存储器中调用并运行该可执行程序代码,使得该车辆执行上述第一方面和第一方面任一项可能的实现中的泊车控制方法。
21、第四方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面和第一方面任一项可能的实现中的泊车控制方法。
22、第五方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面和第一方面任一项可能的实现中的泊车控制方法。
- 还没有人留言评论。精彩留言会获得点赞!