一种分布式驱动汽车底盘功能互冗余容错控制方法
本发明涉及,具体为一种分布式驱动汽车底盘功能互冗余容错控制方法。
背景技术:
1、近年来,分布式驱动汽车以其可控自由度高、响应速度快、底盘线控集成度高的优点受到广泛关注和研究,有着巨大的应用潜力。该驱动构型多由轮毂电机或轮边电机作为执行器,独立驱动单个车轮,能够实现动力系统总体需求转矩的集中分配与单个车轮转矩的精准响应,适用于多种工况下的车辆稳定性控制需求。然而,由于分布式驱动汽车是一个典型的过驱动系统,系统复杂性高、耦合性强、执行器与传感器数量增多,因此底盘子系统发生故障的风险将大幅增加,且故障后引起的整车动力学响应也将更加复杂,容易导致车辆出现甩尾、激转等危险状况,从而威胁到乘客、行人或其他交通参与者的生命安全。为保证分布式驱动汽车在底盘执行机构发生故障时仍能具备安全稳定行驶的能力,设计一种安全有效的容错控制方法是十分有必要的。
2、鲁棒模型预测控制(rmpc)与传统模型预测控制(mpc)相比,不仅继承了传统mpc具有的在线滚动优化优势,而且在算法设计初始就能将系统的不确定性以及外部扰动考虑进去,使得整个控制系统在实际控制过程中面对一定的故障时仍能表现出良好的性能。对于分布式驱动汽车而言,由于考虑了执行器故障对系统带来的不利影响,rmpc控制算法能够有效地提升底盘系统的容错能力,从而保证车辆行驶过程中的安全性与稳定性。
3、现有分布式驱动汽车底盘容错控制方法中,大多数研究针对执行器故障采用了单一的控制策略,并没有考虑到执行器的故障程度。然而,执行器故障的严重程度对车辆系统动力学的影响有着巨大的差别,轻微的故障只需通过对该执行器的输出量进行约束调整就能解决,而当某执行器故障较为严重时,其本身将不再具备自调整能力,也无法响应控制器下达的任何指令,但由于分布式驱动汽车底盘子系统之间存在功能相似的特性,可以考虑使用未发生故障的子系统所具有的功能特性去补偿发生严重故障的子系统所缺失的能力,从而达到一种功能互助冗余的效果,在软件算法层面就能很好的进行底盘容错控制。某现有专利利用分布式驱动汽车前轮可差动转向的能力对故障的转向电机进行补偿,并在此基础上通过计算转向电机的效率损失系数以及调用不同的转角追踪策略模块,以实现方向盘转角与前轮转角的连续对应。虽然该方法能够有效提升车辆在转向电机严重失效情况下的行驶安全性,但缺乏对驱动轮故障情况的考虑,无法保证底盘的综合容错能力。
技术实现思路
1、本发明的目的在于提供一种分布式驱动汽车底盘功能互冗余容错控制方法,以解决上述背景技术中提出的问题。
2、为实现本发明的目的,本发明采用如下技术方案加以实施。
3、一种分布式驱动汽车底盘功能互冗余容错控制方法,包括以下步骤:
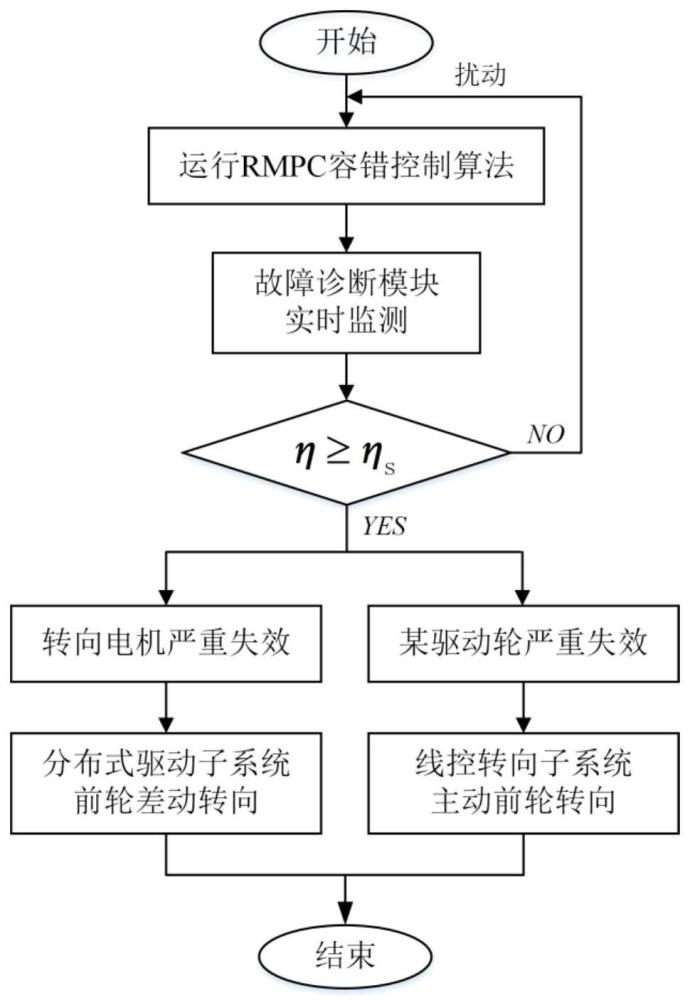
4、步骤一:针对分布式驱动汽车底盘执行器增多,故障风险增大的问题,将鲁棒模型预测控制算法应用于车辆底盘,以增强其容错能力;
5、步骤二:利用底盘控制器中的故障诊断模块实时监测底盘转向子系统执行器和驱动子系统执行器的故障率η,并设定安全阈值ηs;
6、步骤三:根据安全阈值ηs判定执行器故障程度,当执行器发生轻微故障时,视该故障为车辆系统外部扰动,并仍使用rmpc算法对车辆底盘执行器响应行为进行控制,以降低扰动对车辆正常行驶产生的影响;当执行器发生严重故障时,该执行器已无法准确响应控制器指令,极易导致车辆失稳,则停止使用rmpc算法,并切换至底盘子系统功能互冗余容错控制策略弥补严重故障执行器所缺失的执行能力;
7、步骤四:基于步骤三中所述底盘子系统功能互冗余容错控制策略,当转向子系统中转向电机严重失效时,则基于滑膜控制理论利用分布式驱动汽车前轮可差动转向的功能特性补偿前轮转角的不足或超出;当驱动子系统中某驱动轮严重失效时,则基于合作博弈理论利用转向电机可主动施加额外前轮转角的功能特性帮助车辆快速纠正姿态。
8、作为本发明的优选方案,所述步骤一中的鲁棒模型预测控制算法具体为:
9、给定车辆底盘实际离散化被控系统:
10、
11、其中,x(k)为系统状态,y(k)为系统输出,u(k)为控制输入,w(k)为有界的系统外部扰动,a,b,d为对应的系数矩阵;
12、将以上线性离散化被控系统中的外部扰动w(k)置为0,得到其名义系统:
13、
14、式中,为名义系统的状态量,为名义系统的输出量,为名义系统的控制量;
15、则实际被控系统的鲁棒模型预测控制问题被转化为两部分,第一部分为求解名义系统的控制律第二部分为求解基于实际系统状态x(k)与名义系统状态之间误差的线性反馈控制律将两部分相加即为实际被控系统的控制输入。
16、作为本发明的优选方案,所述故障率的计算公式如下所示:
17、
18、式中,tc为执行器发生故障后的控制动作且tc∈[0,2td),td为执行器正常工作时期望的控制输出量。
19、作为本发明的优选方案,所述安全阈值的计算公式如下所示:
20、
21、式中,k为比例系数,δf为车辆前轮转角,vx为车辆行驶速度,μ为路面附着系数,ηs为安全阈值且ηs∈[0,1];
22、当μ较小,δf、vx较大时,车辆处于较不安全的行驶工况,此时安全阈值较小,对执行器故障的容忍程度较低;反之,当μ较大,δf、vx较小时,车辆处于较稳定的行驶工况,此时安全阈值较大,对执行器故障的容忍程度较高。
23、作为本发明的优选方案,所述故障程度的判定方法为:根据故障诊断模块实时计算执行器故障率和安全阈值并将两者进行对比:
24、若执行器故障率η小于安全阈值ηs,则认定执行器发生轻微故障,使用rmpc算法控制;
25、若执行器故障率η大于等于安全阈值ηs,则认定执行器发生严重故障,并触发底盘子系统功能互冗余容错控制策略。
26、作为本发明的优选方案,在步骤四中,利用分布式驱动子系统前轮的可差动转向的特性补偿前轮转角的计算公式为:
27、
28、式中,δf′为前轮差动力矩产生的转角,δc为转向电机故障后输出的前轮转角,δd为期望的前轮转角,df为转向执行机构的等效阻尼,τf为左前轮和右前轮分别绕各自主销的回正力矩之和,mf′为前轴两侧车轮纵向力绕各自主销所产生的差动力矩。
29、作为本发明的优选方案,在步骤四中,利用滑膜控制理论得到转向电机失效时前轮的差动转向补偿转角的控制律,构造滑模面的过程如下:
30、s=|δc-δd|=δf′,
31、对滑模面求导可得:
32、
33、为了减小参数不确定性的影响,采用指数趋近律:
34、
35、式中,k1、k2为控制增益且均大于0,sgn()为符号函数;
36、则差动转向所需差动力矩的滑膜控制律为:
37、mf′=-df(k1s+k2sgn(s))-τf,
38、为了抑制系统的高频抖振现象,采用饱和函数sat()代替符号函数sgn():
39、
40、式中,p为滑模面的边界层厚度。
41、作为本发明的优选方案,在步骤四中,使用差动力矩补偿前轮转角会导致车辆横摆角速度发生瞬时变化,从而影响车辆横摆稳定性,为解决该问题,则同时改变后轴两侧车轮驱动力矩,使得同侧两车轮的驱动力矩之和在控制前后始终保持一致。
42、作为本发明的优选方案,在步骤四中,基于合作博弈理论的主动转向补偿方式为:将剩余的三个健康驱动轮和转向电机建模为四个玩家,利用分布式模型预测控制理论建立四个玩家各自的二次型成本函数并写成加权和的形式,四个玩家同时求解该加权和成本函数的最小优化问题,从而求得转向电机额外施加的转角控制量以及三个健康驱动轮的驱动力矩控制量,各个玩家的二次型成本函数ji(k)公式如下:
43、
44、式中,i∈{1,2,3,4}分别代表合作博弈中的四个玩家,即剩余的三个健康驱动轮和转向电机,n代表分布式模型预测控制中的预测时域和控制时域,k代表采样时刻,x(k+j)代表k采样时刻中第j步的系统状态量,ui(k+j-1)代表k采样时刻中第j-1步玩家i的控制量,ri对应玩家i控制量的权重矩阵,qi代表了玩家i所追求状态量的权重矩阵,转向电机追求车辆的目标路径跟踪性能,剩余的三个健康驱动轮追求车辆横摆角速度以及车速的跟踪性能;
45、将四个玩家的成本函数写成加权和形式,即得到基于合作博弈的最优化算法:
46、
47、式中,为k采样时刻中能够使某失效驱动轮给车辆带来的影响降到最小的各玩家的最优控制量,ρi为各玩家成本函数所对应的权值系数且σρi=1。
48、为避免执行器达到输出饱和,满足如下约束形式:
49、
50、式中,ui_min、ui_max分别为各玩家控制量的最小值和最大值。
51、有益效果
52、1、本发明设计了一种用于判断执行器故障程度的安全阈值,能够根据车速、车辆前轮转角以及路面附着系数的变化而在线实时更新,为分布式驱动汽车底盘容错控制的策略切换提供了可靠的依据。
53、2、本发明针对分布式驱动汽车底盘执行器失效的问题设计了两种控制策略,当执行器轻微失效时,使用具有强抗扰能力的rmpc容错算法;当执行器严重失效时,则切换为底盘子系统功能互冗余容错控制策略,两种策略的联合使用最大程度地保障了车辆行驶过程中的安全性与稳定性。
54、3、本发明针对底盘执行器严重失效问题所使用的子系统功能互冗余容错控制策略,能够巧妙地利用健康子系统所具有的功能特性去弥补失效子系统所缺失的能力,仅在软件算法层面就可以有效实现容错控制,具有一定的经济效益。
- 还没有人留言评论。精彩留言会获得点赞!