AGV车的充电控制方法、装置、存储介质、电子装置及AGV车与流程
本发明涉及agv车的充电控制,具体而言,涉及一种agv车的充电控制方法、装置、存储介质、电子装置及agv车。
背景技术:
1、自动导向车(automated guided vehicle,简称agv),也称为自动导向搬运车、自动引导搬运车,其是一种能够自主行驶、识别环境并执行任务的机器人,在物流、制造业等领域有广泛应用。在厂区内运行的agv车有多种补能方式,包括每天定时充电、每跑一圈定点大电流快速充电以及电量不足时自动充电等。以定点大电流充电的补能方式为例,agv车沿着固定路线运行,每绕一圈到固定的补能点进行快速充电补能(比如运行一圈需要20分钟,快速充电需要2分钟)。该种运行模式下的特点是要求能快速补充每圈消耗的能量,因此充电电流较大,每天充电的次数较多。
2、当前的agv车辆大多采用铅酸蓄电池。但是铅酸蓄电池的寿命短,一般只能用2年左右,而且铅酸蓄电池的污染性较大。因此,通常需要对在运行的agv车辆进行电池更换,使用锂电池替代铅酸蓄电池。然而,使用铅酸蓄电池的agv车辆是通过电池总压对铅酸蓄电池进行充电管理,在更换为锂电池后,agv车存在电池控制方式匹配的问题,导致锂电池无法与agv车直接进行通信。
3、因此,agv车无法实时监测锂电池的单体电压,无法判断电池即将充满而提前关闭充电机,以及无法判断电池即将处于欠压状态需进行充电,导致电池单体电压触发充电/放电保护电压,在大电流充电时或在电池处于欠压时断开继电器,进而导致继电器触点黏连或拉弧,引起继电器故障和agv车的停机,极大地降低了继电器和电池的使用寿命以及agv车的工作效率,存在严重的安全风险。同时,改造agv车的充电机结构、系统或对agv车加装额外的装置以解决上述问题需要较高的人力和物力成本。
4、有鉴于此,有必要设计一种agv车的充电控制方法、装置、存储介质、电子装置及agv车,能够避免agv车在运行的过程中触发过压或欠压保护而断开继电器,防止继电器发生触点黏连和拉弧,进而提升agv车的可靠性、安全性和工作效率,延长电池的使用寿命。同时,无需对现有agv车和充电机的结构或系统进行改造,降低了agv车的使用成本。
技术实现思路
1、本发明的目的在于提供一种agv车的充电控制方法、装置、存储介质、电子装置及agv车,以解决现有技术中agv车在大电流充电时或在电池处于欠压时断开继电器,进而导致继电器触点黏连或拉弧,引起继电器故障和agv车的停机的问题。
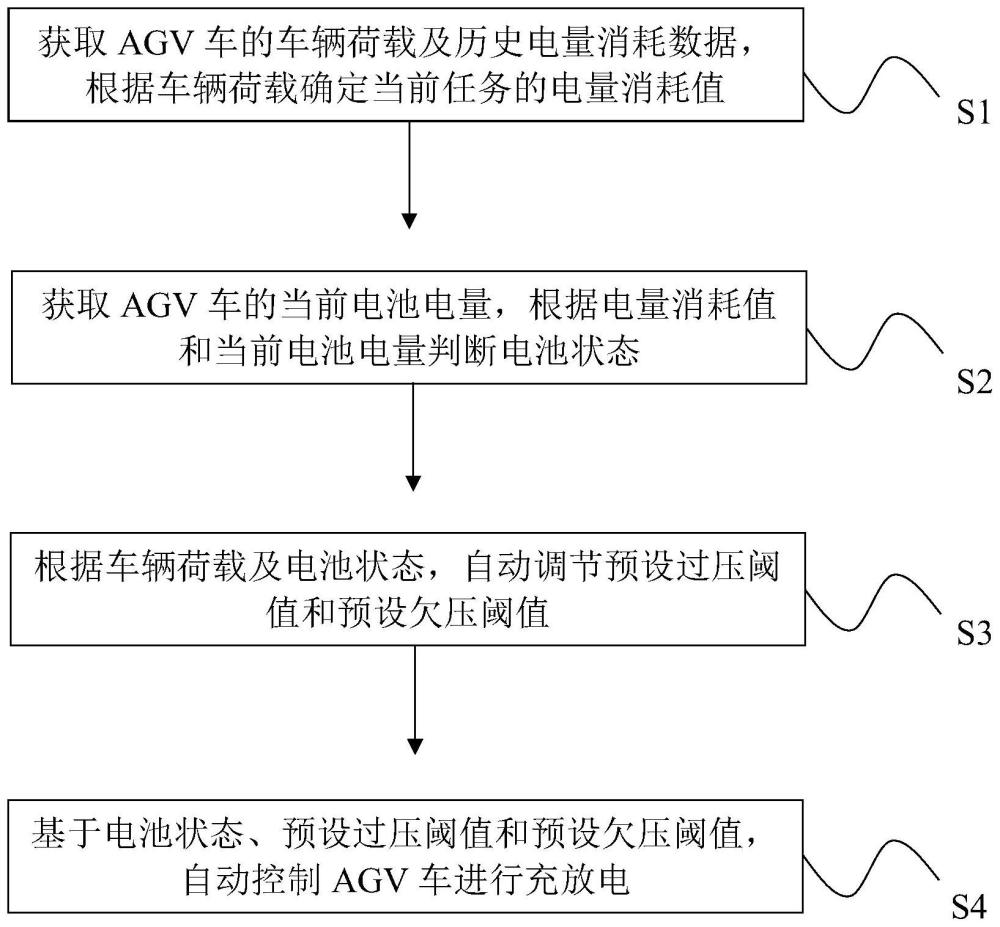
2、为实现上述目的,本发明提供一种agv车的充电控制方法,包括如下步骤:获取agv车的车辆荷载及历史电量消耗数据,根据车辆荷载确定当前任务的电量消耗值;获取agv车的当前电池电量,根据电量消耗值和当前电池电量判断电池状态;根据车辆荷载及电池状态,自动调节预设过压阈值和预设欠压阈值;以及,基于电池状态、预设过压阈值和预设欠压阈值,自动控制agv车进行充放电。
3、采用本发明的agv车的充电控制方法,能够避免agv车在运行的过程中触发过压或欠压保护而断开继电器,防止继电器发生触点黏连和拉弧,进而提升agv车的可靠性、安全性和工作效率,延长电池的使用寿命。同时,无需对现有agv车和充电机的结构或系统进行改造,降低了agv车的使用成本。
4、上述的agv车的充电控制方法,判断电池状态的步骤进一步包括:根据当前电池电量与电量消耗值之间的差值以及预设欠压阈值,判断电池状态为电量充足、电量不足或电量严重不足。
5、上述的agv车的充电控制方法,判断电池状态为电量充足、电量不足或电量严重不足的步骤进一步包括:若当前电池电量与电量消耗值之间的差值大于预设欠压阈值,判断电池状态为电量充足;或者,若当前电池电量与电量消耗值之间的差值小于或等于预设欠压阈值且大于零,判断电池状态为电量不足;或者,若当前电池电量与电量消耗值之间的差值小于或等于零,判断电池状态为电量严重不足。
6、上述的agv车的充电控制方法,自动调节预设过压阈值和预设欠压阈值的步骤进一步包括:若电池状态为电量充足,保持预设过压阈值及预设欠压阈值不变;或者,若电池状态为电量不足或电量严重不足,根据车辆荷载上调预设过压阈值和/或下调预设欠压阈值。
7、上述的agv车的充电控制方法,根据车辆荷载上调预设过压阈值和/或下调预设欠压阈值的步骤进一步包括:若车辆荷载大于或等于预设载重,上调预设过压阈值为第一过压阈值,下调预设欠压阈值为第一欠压阈值;或者,若车辆荷载小于预设载重,上调预设过压阈值为第二过压阈值,下调预设欠压阈值为第二欠压阈值。
8、上述的agv车的充电控制方法,第一过压阈值大于第二过压阈值,第一欠压阈值小于第二欠压阈值。
9、上述的agv车的充电控制方法,自动控制agv车进行充放电的步骤进一步包括:若电池状态为电量充足,控制agv车不进行充电;或者,若电池状态为电量不足或电量严重不足,控制agv车行驶至充电补能点进行充电。
10、上述的agv车的充电控制方法,控制agv车行驶至充电补能点进行充电的步骤进一步包括:若电池状态为电量不足,控制agv车完成当前任务后再行驶至充电补能点进行充电;或者,若电池状态为电量严重不足,控制agv车直接行驶至充电补能点进行充电。
11、上述的agv车的充电控制方法,当电池状态为电量不足或电量严重不足时,保持充电继电器处于闭合状态直到agv车行驶至充电补能点进行充电;以及,当当前电池电量充电达到预设过压阈值时,控制agv车驶离充电补能点,断开充电继电器。
12、为了更好地实现本发明的目的,本发明还提供一种agv车的充电控制装置,包括:第一数据采集与分析模块,用于获取agv车的车辆荷载及历史电量消耗数据,根据车辆荷载确定当前任务的电量消耗值;第二数据采集与分析模块,用于获取agv车的当前电池电量,根据电量消耗值和当前电池电量判断电池状态;阈值调节模块,用于根据车辆荷载及电池状态,自动调节预设过压阈值和预设欠压阈值;控制模块,用于基于电池状态、预设过压阈值和预设欠压阈值,自动控制agv车进行充放电;以及,数据库,用于存储历史电量消耗数据。
13、上述的agv车的充电控制装置,在第二数据采集与分析模块中,判断电池状态的步骤进一步包括:根据当前电池电量与电量消耗值之间的差值以及预设欠压阈值,判断电池状态为电量充足、电量不足或电量严重不足。
14、上述的agv车的充电控制装置,在第二数据采集与分析模块中,判断电池状态为电量充足、电量不足或电量严重不足的步骤进一步包括:若当前电池电量与电量消耗值之间的差值大于预设欠压阈值,判断电池状态为电量充足;或者,若当前电池电量与电量消耗值之间的差值小于或等于预设欠压阈值且大于零,判断电池状态为电量不足;或者,若当前电池电量与电量消耗值之间的差值小于或等于零,判断电池状态为电量严重不足。
15、上述的agv车的充电控制装置,在阈值调节模块中,自动调节预设过压阈值和预设欠压阈值的步骤进一步包括:若电池状态为电量充足,保持预设过压阈值及预设欠压阈值不变;或者,若电池状态为电量不足或电量严重不足,根据车辆荷载上调预设过压阈值和/或下调预设欠压阈值。
16、上述的agv车的充电控制装置,在阈值调节模块中,根据车辆荷载上调预设过压阈值和/或下调预设欠压阈值的步骤进一步包括:若车辆荷载大于或等于预设载重,上调预设过压阈值为第一过压阈值,下调预设欠压阈值为第一欠压阈值;或者,若车辆荷载小于预设载重,上调预设过压阈值为第二过压阈值,下调预设欠压阈值为第二欠压阈值。
17、上述的agv车的充电控制装置,第一过压阈值大于第二过压阈值,第一欠压阈值小于第二欠压阈值。
18、上述的agv车的充电控制装置,在控制模块中,自动控制agv车进行充放电的步骤进一步包括:若电池状态为电量充足,控制agv车不进行充电;或者,若电池状态为电量不足或电量严重不足,控制agv车行驶至充电补能点进行充电。
19、上述的agv车的充电控制装置,在控制模块中,控制agv车行驶至充电补能点进行充电的步骤进一步包括:若电池状态为电量不足,控制agv车完成当前任务后再行驶至充电补能点进行充电;或者,若电池状态为电量严重不足,控制agv车直接行驶至充电补能点进行充电。
20、上述的agv车的充电控制装置,当电池状态为电量不足或电量严重不足时,保持充电继电器处于闭合状态直到agv车行驶至充电补能点进行充电;以及,当当前电池电量充电达到预设过压阈值时,控制agv车驶离充电补能点,断开充电继电器。
21、为了更好地实现本发明的目的,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被设置为运行时执行如上所述的agv车的充电控制方法。
22、为了更好地实现本发明的目的,本发明还提供一种电子装置,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行如上所述的agv车的充电控制方法。
23、为了更好地实现本发明的目的,本发明还提供一种agv车,设置有或通过网络连接设置有如上所述的agv车的充电控制装置。
24、当然,本发明所提供的充电控制装置、存储介质、电子装置及agv车,与上述agv车的充电控制方法对应,有益技术效果同上。
25、为了对本发明的上述及其他方面有更佳的了解,下文特举实施例,并配合附图详细说明如下,但不作为对本发明专利保护范围的限定。
- 还没有人留言评论。精彩留言会获得点赞!