一种单线双向运行常导磁浮线路辅助停车区布置方法与流程
[0001]
本发明涉及磁浮列车运行控制领域,尤其是涉及一种单线双向运行常导磁浮线路辅助停车区布置方法。
背景技术:
[0002]
常导磁浮列车无车轮,列车的高速运行借助了列车与轨道间磁力的多种相互作用。其中,常导磁浮列车的悬浮与内部照明灯所需电力主要来自于车载电源及车载发电装置。当列车在高速运行时,车载发电装置可为列车设备供电,并给车载电源供电。当列车静止或低速运行时,车载电源为列车供电。当电量不足时,需要供电轨为电源充电。然而,磁浮线路仅在辅助停车区(简称为停车区)设置有供电轨和应急通道。因此,在“故障-安全”的思想指导下,磁浮列车的运行需要实时考虑前方的辅助停车区,即借助“停车点步进”运行模式来保证列车在任何时候都能在辅助停车区停车。
[0003]
常导磁浮线路建设过程中,辅助停车区的布置常参考上海磁浮示范线的名义值,难以应对复杂工况,且速度参考范围较小,通用性有限。基于此,虞翊等2019年发表在《同济大学学报(自然科学版)》的文献“基于防护速度的高速磁浮辅助停车区设置”提出了基于防护速度曲线的单向运营线路辅助停车区布置方法。该方法是一种以终点车站为第一个基准辅助停车区,进而结合停车区的危险点和可达点、安全制动曲线与安全悬浮曲线依次方向起点站逼近,实现停车区的布置(简称为逆向布置法)。该原始的逆向布置法具有一定的通用性,但针对的线路是单向运营线路,而实际中存在建设单线双向运营线路的可能性,针对此类线路,仅基于该方法不是一种可行的方法。同时,列车运行控制系统以最大速度防护曲线、最小速度防护曲线和最大区间限速为列车安全运行的防护基础,这使得仅借助安全制动曲线和安全悬浮曲线来确定辅助停车区的位置并不能保证列车的安全运行。此外,公开号为cn109050585a的专利“一种高速磁浮列车线路轨道运行辅助停车区确定方法”提出了一种以起点站为第一个基准辅助停车区,进而模拟列车运行,确定下一个辅助停车区的布置方式。并基于该方式讨论了单线双向运行线路的辅助停车区布置方法,即均以相应的起点站进行单方向的布置,将重复的辅助停车区进行合并。然而,该专利实质上仍旧借助安全制动曲线和安全悬浮曲线进行辅助停车区位置的确定,不能保障列车安全运行的要求。同时,简单地采用双向单独布置再整合的策略,不利于停车区布置的经济性,难以在保证列车安全运行的前提下实现成本节约。
技术实现要素:
[0004]
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种单线双向运行常导磁浮线路辅助停车区布置方法。
[0005]
本发明的目的可以通过以下技术方案来实现:
[0006]
一种单线双向运行常导磁浮线路辅助停车区布置方法,该方法包括以下步骤:
[0007]
步骤s1:利用改进逆向布置法得到主方向停车区,将次方向终点车站的加速区作
为次方向基准停车区;
[0008]
步骤s2:利用改进逆向布置法得到次方向临时停车区;
[0009]
步骤s3:根据次方向临时停车区与其基准停车区之间是否存在主方向停车区得到双方向停车区或次方向正式停车区;
[0010]
步骤s4:双方向停车区或次方向正式停车区作为反向基准停车区,重复步骤 s2-s4,直至双方向停车区或次方向正式停车区进入主方向起点车站的加速区,根据主方向停车区、双方向停车区和次方向正式停车区进行单线双向运行常导磁浮线路辅助停车区布置。
[0011]
利用改进逆向布置法得到主方向停车区包括以下步骤:
[0012]
步骤s101:将终点车站的加速区作为主方向的当前基准停车区;
[0013]
步骤s102:根据当前基准停车区的可达点作安全悬浮速度曲线,根据安全悬浮速度曲线确定最小速度防护曲线,最小速度防护曲线与目标速度曲线交于交点;
[0014]
步骤s103:根据交点计算最大速度防护曲线,以最大速度防护曲线计算安全制动速度曲线,根据安全制动速度曲线确定的危险点得到下一主方向停车区的位置;
[0015]
步骤s104:将下一主方向停车区作为当前基准停车区,重复步骤s102-s104,直至下一主方向停车区进入主方向起点车站的加速区。
[0016]
所述危险点是停车区末端位置,根据停车区长度和危险点得到停车区首段位置,停车区首段位置为可达点,根据危险点和可达点得到下一主方向停车区的位置。
[0017]
所述安全悬浮速度曲线的计算公式为:
[0018][0019]
其中,为安全悬浮速度曲线第i时刻的速度分量,为安全悬浮速度曲线第i时刻的里程分量,δt为采样间隔,a
i
为第i时刻列车的加速度。
[0020]
所述最小速度防护曲线的计算公式为:
[0021][0022]
其中,为最小速度曲线上的速度分量,为距离分量,δtt为牵引切断命令发出至涡流制动启用过程中的系统延时,δv为测速误差,δs为定位误差,a
worst
为列车最不利条件下的加速度,即列车空载、遭遇最大逆风风速(最大逆风风速为列车可能遇到的最大逆风风速)、且轨道面与列车滑撬摩擦系数达到最大的情景。
[0023]
所述最大速度防护曲线的计算公式为:
[0024][0025]
其中,为最大速度防护曲线第i时刻的速度分量,为最大速度防护曲线第i时刻的里程分量,δt为采样间隔,a
i
为第i时刻列车的加速度。
[0026]
所述安全制动速度曲线的计算公式为:
[0027][0028]
其中,为安全制动速度曲线速度分量,为里程分量,δtt为牵引切断命令发出至牵引切断完成过程中的系统延时,δv为测速误差,δs为定位误差,a
worst
为列车最不利条件下的加速度,即列车满载、涡流制动力受损、遭遇最大顺风风速(最大顺风风速为列车可能遇到的最大逆风风速)、且轨道面与列车滑撬摩擦系数达到最小的情景。
[0029]
所述的步骤s3中,若次方向临时停车区与其基准停车区之间存在主方向停车区,则距离该次方向临时停车区最近的主方向停车区设置为双方向停车区,同时取消该次方向临时停车区,若计算得到的次方向临时停车区与反向基准停车区之间不存在主方向停车区,则该次方向临时停车区为次方向正式停车区。
[0030]
利用改进逆向布置法得到的主方向停车区或次方向临时停车区位于不宜设置停车区的位置,将该主方向停车区或次方向临时停车区向终点车站方向移动。
[0031]
与现有技术相比,本发明具有以下优点:
[0032]
(1)使用了改进逆向布置法,并且设置了主方向和次方向,利用单向优先法,将部分停车区更合理地设置为双方向停车区,实现线路建设成本的节约,提高了线路规划与设计的科学性与经济性。
[0033]
(2)改进逆向布置法使用最小速度防护曲线和最大速度防护曲线,而不是安全悬浮速度曲线和安全制动速度曲线,使停车区的布置结果更加精确与合理。
附图说明
[0034]
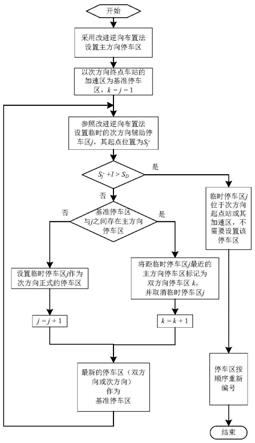
图1为本发明的整体流程图;
[0035]
图2为本发明改进逆向布置法流程图;
[0036]
图3为本发明改进逆向布置法示意图;
[0037]
图4为现有技术的停车区布置结果;
[0038]
图5为本发明的停车区布置结果。
具体实施方式
[0039]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0040]
实施例
[0041]
本实施例提供一种单线双向运行常导磁浮线路辅助停车区布置方法,创新点在于使用改进逆向布置法和单向优先法。
[0042]
(1)改进逆向布置法
[0043]
将图3车站o和车站d之间线路视为单向运行线路,即正常运营方向为od 方向。其中,h
i
和r
i
(i取1,2,3,
…
,n)分别代表危险点和可达点,p
i
为目标速度曲线和最小速度防护曲线的交点。同时,令l表示停车区的长度,停车区i的位置为 [s
i
,s
i
+l]。并令s
o
为车站o危险点位置(位于加速区),s
d
为车站d可达点位置。则改进逆向布置法的流程如图2所示,若以
车站d作为终点车站,其步骤如下:
[0044]
步骤1:基于终点车站d的可达点作安全悬浮速度曲线,进而确定最小速度防护曲线。最小速度防护曲线与目标速度曲线交于点p1。
[0045]
步骤2:根据点p1或其下方点(由附加的安全余量确定)计算最大速度防护曲线。进而以最大速度防护曲线计算安全制动速度曲线,并根据该安全制动速度曲线所确定的危险点,即可确定第一个停车区的位置。
[0046]
步骤3:将新确定的停车区作为当前基准停车区,以它的可达点计算安全悬浮速度曲线与最小速度防护曲线,并根据目标速度曲线与最小速度防护曲线的交点绘制最大速度防护曲线与安全制动速度曲线,即可确定下一个停车区。
[0047]
步骤4:重复步骤3,并为停车区按顺序编号。当下一个停车区的位置位于起点车站o加速区时,则停止,布置完成。
[0048]
其中,若按照改进逆向布置法得到的某个停车区位于不宜设置停车区的位置 (如,桥梁、陡坡道),可将其向终点车站方向偏移,进而再作为基准停车区进行其它停车区的布置。
[0049]
(2)单向优先法
[0050]
图4为专利cn109050585a得到的停车区布置情况。可见,尽管该结果能够满足列车安全的双向运行,但停车区较为密集,经济性不理想。
[0051]
单向优先法首先将车站区间的一个方向为主方向,另一个方向为次方向。进而使用改进逆向布置法先进行主方向的布置,之后依次布置次方向的停车区,合理地将已有的主方向停车区设置为双方向停车区。若以图5中od方向为主方向,do 方向为次方向,则单向优先法的流程如图1所示,主要步骤如下:
[0052]
步骤a:先采用改进逆向布置法对主方向进行停车区的布置,将次方向终点车站的加速区作为次方向当前基准停车区。
[0053]
步骤b:参照改进逆向布置法确定当前的次方向临时停车区,并判断是否进入步骤c。当次方向临时停车区的位置超过车站区间时,则该次方向临时停车区不需要布置,车站区间停车区布置完成。否则,进入步骤c。
[0054]
步骤c:判断是否设置双方向停车区或将次方向临时停车区确定为次方向正式停车区,并返回步骤b。其中,若计算得到的次方向临时停车区与其基准停车区之间存在主方向停车区,则将距离该次方向临时停车区最近的主方向停车区设置为双方向停车区,并取消该次方向临时停车区。若计算得到的次方向临时停车区与其基准停车区之间不存在主方向停车区,则将该次方向临时停车区设置为次方向正式停车区。
[0055]
采用单向优先法流程进行停车区的布置结果如图5所示。对比图4和图5可知,图4有17个停车区,且没有两方向停车区相互重叠的现象,而图5只有13个停车区,即本发明较现有技术能较显著地降低了辅助停车区的数量,较大幅度提高了经济性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1