一种虚拟编组列车动态编组建立的控制方法及系统
本发明涉及轨道交通信号控制,特别是涉及一种虚拟编组列车动态编组建立的控制方法及系统。
背景技术:
1、随着城市轨道交通(以下简称“城轨”)网络化规模增长,客流时空分布不均衡的特点愈发凸显。为解决这一特点带来的城轨“高峰拉不走,低峰装不满”问题,列车虚拟编组(virtual coupling,vc)技术受到了业界的广泛关注。该技术通过缩短不存在物理连挂关系的列车单元的追踪间距,从而使它们提供像物理连挂的列车一样的运输作业服务。基于这种灵活地编组方式,虚拟编组技术能够动态地调整编组车辆数量,从而实现线路运力与客流需要的实时灵活匹配,也因此成为了当今业内的研究热点。
2、目前,针对虚拟编组列车动态编组建立的研究大多关注列车调度管理层的方法设计,而针对列车控制层的方法设计较少。在动态编组建立过程中,列车单元间的追踪间距需要从建立前的较大值缩小至编组后的较小值。列车控制层则负责控制各列车单元运行,在满足安全防护条件的前提下缩短追踪间距。
3、虚拟编组中会设置一个紧急制动触发(emergent braking intervention,ebi)速度作为安全防护条件,当列车单元超过ebi速度后则施加紧急制动。实际中,ebi速度通常由一个多输入参数(位置、速度、加速度、列车性能)、高次非线性(用以计算列车的相对制动轨迹)的函数计算。因此,计算一次ebi速度需要占用大量的计算资源。
4、在动态编组建立过程中,后车应尽可能地以更高的速度运行,从而逐渐缩短与前车的追踪间距。但同时,后车ebi速度同样在不断减小。因此,若采用现有的控制方法,仅考虑当前时刻的ebi速度,会出现控制命令调整不及时、后车超速紧急的问题;而由于ebi速度计算的复杂性,使用预测控制类的方法(例如模型预测控制)所需要的计算资源过高、难以满足工程算法实时性的要求。
技术实现思路
1、本发明的目的是提供一种虚拟编组列车动态编组建立的控制方法及系统,可在不触发紧急制动的前提下,高效、快速地缩短列车单元的追踪间距,实现虚拟编组列车动态编组建立。
2、为实现上述目的,本发明提供了如下方案:
3、一种虚拟编组列车动态编组建立的控制方法,包括:
4、后车接收前车在上一时刻生成的预测运行轨迹;
5、以达到目标运行速度为目标,规划前车的推荐驾驶曲线;
6、根据前车在上一时刻生成的预测运行轨迹,结合紧急制动触发速度计算函数,以最快缩短与前车的追踪间距为目标,规划后车的推荐驾驶曲线;
7、根据前车和后车的当前状态以及推荐驾驶曲线,结合目标速度的计算函数,分别计算前车和后车在未来控制周期的预测运行轨迹;
8、以前车和后车在未来控制周期的预测运行轨迹作为控制目标,分别计算前车和后车在当前时刻的控制命令;
9、根据当前时刻的控制命令分别控制前车和后车,以控制前车和后车按照推荐驾驶曲线规划的方式运行。
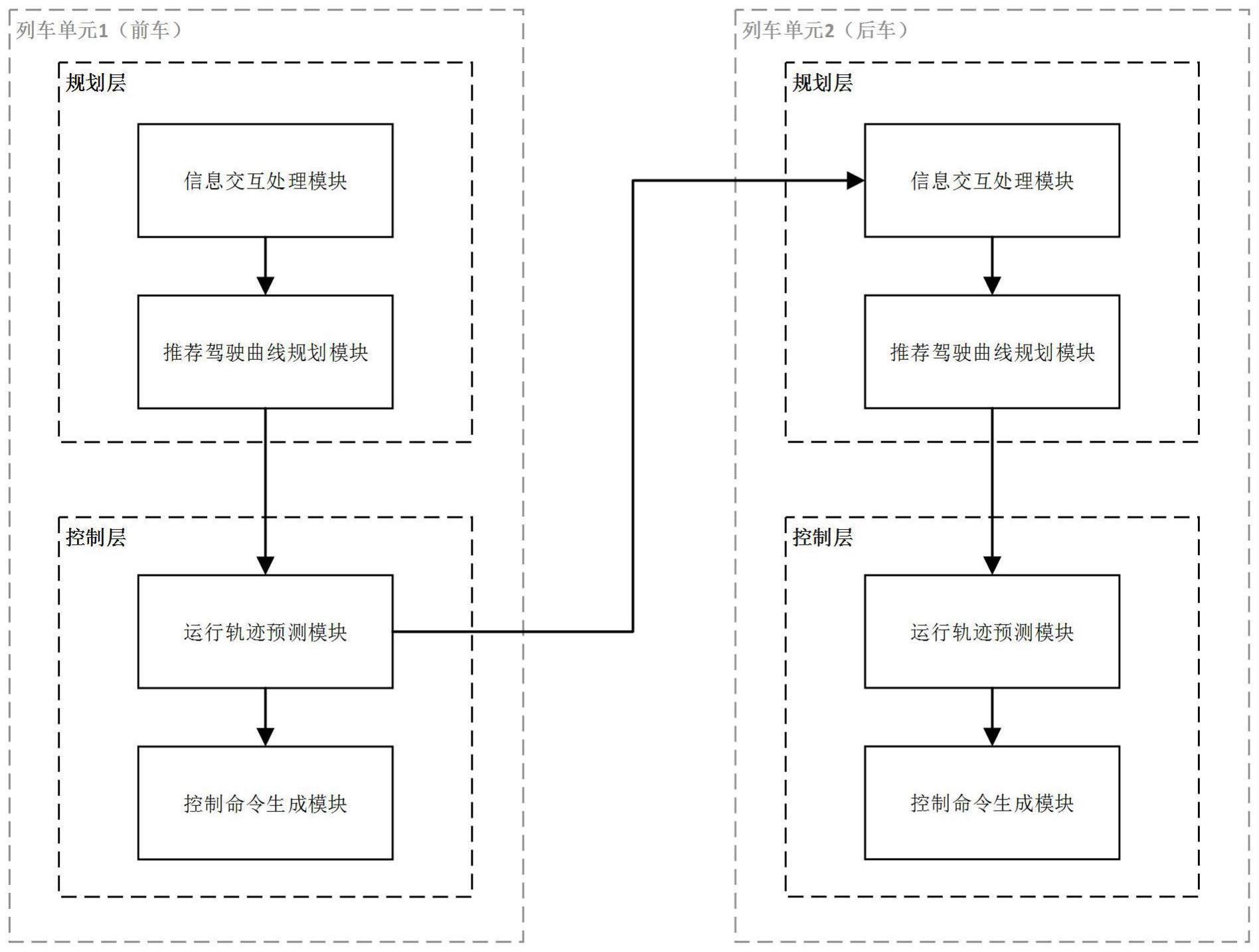
10、一种虚拟编组列车动态编组建立的控制系统,所述控制系统包括:在每辆列车单元上配备的规划层和控制层;
11、规划层用于接收其他列车单元的预测运行轨迹,并根据所述预测运行轨迹规划本列车单元的推荐驾驶曲线;
12、控制层用于根据本列车单元的推荐驾驶曲线计算本列车单元的预测运行轨迹,以预测运行轨迹作为控制目标确定控制命令,同时将本列车单元的预测运行轨迹发送至其他列车单元。
13、根据本发明提供的具体实施例,本发明公开了以下技术效果:
14、本发明公开一种虚拟编组列车动态编组建立的控制方法及系统,根据前车在上一时刻生成的预测运行轨迹,结合紧急制动触发速度计算函数,以最快缩短与前车的追踪间距为目标,规划后车的推荐驾驶曲线,从而能够提前预见ebi速度下降的趋势,达到在不触发紧急制动的前提下高效、快速地缩短列车单元的追踪间距,并通过对列车未来的驾驶轨迹进行预测,实现了虚拟编组列车动态编组建立。
技术特征:
1.一种虚拟编组列车动态编组建立的控制方法,其特征在于,包括:
2.根据权利要求1所述的虚拟编组列车动态编组建立的控制方法,其特征在于,所述以达到目标运行速度为目标,规划前车的推荐驾驶曲线,具体包括:
3.根据权利要求2所述的虚拟编组列车动态编组建立的控制方法,其特征在于,所述根据前车的当前状态,以达到目标运行速度为目标,规划推荐驾驶曲线,具体包括:
4.根据权利要求3所述的虚拟编组列车动态编组建立的控制方法,其特征在于,所述根据前车在上一时刻生成的预测运行轨迹,结合紧急制动触发速度计算函数,以最快缩短与前车的追踪间距为目标,规划后车的推荐驾驶曲线,具体包括:
5.根据权利要求4所述的虚拟编组列车动态编组建立的控制方法,其特征在于,所述根据后车的当前状态,结合紧急制动触发速度计算函数,以最快缩短与前车的追踪间距为目标,规划推荐驾驶曲线,具体包括:
6.根据权利要求5所述的虚拟编组列车动态编组建立的控制方法,其特征在于,所述根据前车和后车的当前状态以及推荐驾驶曲线,结合目标速度的计算函数,分别计算前车和后车在未来控制周期的预测运行轨迹,具体包括:
7.根据权利要求1所述的虚拟编组列车动态编组建立的控制方法,其特征在于,所述根据当前时刻的控制命令分别控制前车和后车的控制方法包括:模型预测控制、pid控制和滑模控制。
8.一种虚拟编组列车动态编组建立的控制系统,其特征在于,所述控制系统包括:在每辆列车单元上配备的规划层和控制层;
9.根据权利要求8所述的虚拟编组列车动态编组建立的控制系统,其特征在于,所述规划层包括:信息交互处理模块和推荐驾驶曲线计算模块;
10.根据权利要求8所述的虚拟编组列车动态编组建立的控制系统,其特征在于,所述控制层包括:运行轨迹预测模块和控制命令生成模块;
技术总结
本发明公开一种虚拟编组列车动态编组建立的控制方法及系统,属于轨道交通信号控制技术领域。根据前车在上一时刻生成的预测运行轨迹,结合紧急制动触发速度计算函数,以最快缩短与前车的追踪间距为目标,规划后车的推荐驾驶曲线,从而能够提前预见EBI速度下降的趋势,达到在不触发紧急制动的前提下高效、快速地缩短列车单元的追踪间距,并通过对列车未来的驾驶轨迹进行预测,实现了虚拟编组列车动态编组建立。
技术研发人员:刘宏杰,罗啸林,唐涛,柴铭,吕继东,宿帅
受保护的技术使用者:北京交通大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!