列车轮对运动状态检测方法及装置与流程
本发明涉及轨道交通,尤其涉及一种列车轮对运动状态检测方法及装置。
背景技术:
1、轨道列车的轮对与钢轨之间的相互作用引导列车前行,为了保障列车运行的安全性及稳定性,有必要监测列车轮对的抬升及横移状态。
2、现有研究有使用mems(microelectro mechanical systems,微机电系统)加速度传感器和角加速度传感器监测列车轮对抬升及横移状态。mems加速度传感器和角加速度传感器安装于转向架及车体内。
3、有研究利用安装在列车车轮上的电磁位移式传感器,实时检测车轮与钢轨的横移相对位移,另一位移传感器检测车轮和钢轨的竖向相对位移。加速度传感器实时检测车轮横向加速度,速度传感器实时检测车轮转速。
4、还有研究提出基于图像处理的检测方法。该方法通过简化轮轨接触结构,建立轮轨偏移测量模型,从而对获取的高速列车运行时的轮轨图像数据进行处理获取轮对横移量。
5、上述的几种检测方法检测装置成本高,系统复杂,维护难度大,检测精度低,计算量大。
技术实现思路
1、本发明提供一种列车轮对运动状态检测方法及装置,用以解决现有技术中检测装置成本高,系统复杂,维护难度大,检测精度低,计算量大的缺陷,实现检测简单,成本低,检测精度高。
2、本发明提供一种列车轮对运动状态检测方法,包括:
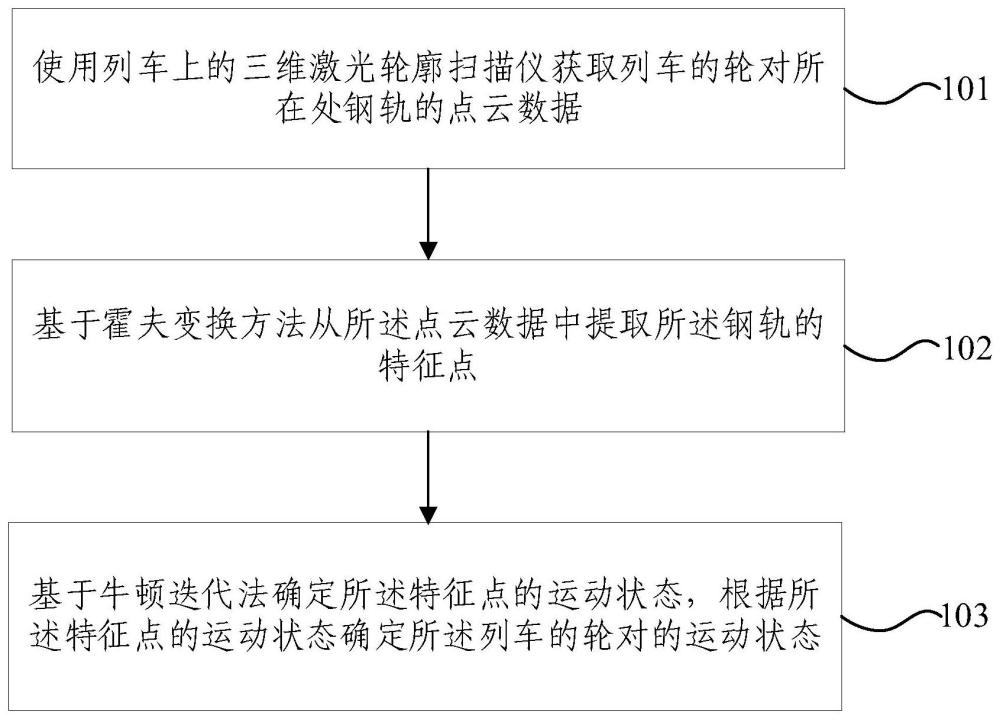
3、使用列车上的三维激光轮廓扫描仪获取列车的轮对所在处钢轨的点云数据;
4、基于霍夫变换方法从所述点云数据中提取所述钢轨的特征点;
5、基于牛顿迭代法确定所述特征点的运动状态,根据所述特征点的运动状态确定所述列车的轮对的运动状态。
6、根据本发明提供的一种列车轮对运动状态检测方法,所述基于霍夫变换方法从所述点云数据中提取所述钢轨的特征点,包括:
7、基于霍夫变换方法从所述点云数据中提取所述钢轨的边缘;
8、根据所述边缘的形状特征,将所述边缘划分为多个线段;
9、确定相邻所述线段之间的交点,将所述交点作为所述钢轨的特征点。
10、根据本发明提供的一种列车轮对运动状态检测方法,所述基于牛顿迭代法确定所述特征点的运动状态,包括:
11、确定所述特征点的初始坐标,将所述特征点在所述点云数据中的坐标作为所述特征点运动后的坐标;
12、根据所述特征点的初始坐标、运动后的坐标、抬升量、横移量和转动角度,构建方程组;
13、基于牛顿迭代法对所述方程组求解,得到所述特征点的抬升量、横移量和转动角度。
14、根据本发明提供的一种列车轮对运动状态检测方法,在所述基于牛顿迭代法对所述方程组求解,得到所述特征点的抬升量、横移量和转动角度之前,还包括:
15、基于退火算法确定所述特征点的抬升量的初始值、横移量的初始值和转动角度的初始值。
16、根据本发明提供的一种列车轮对运动状态检测方法,所述根据所述特征点的运动状态确定所述列车的轮对的运动状态,包括:
17、根据所述转动角度,对所述三维激光轮廓扫描仪的相机坐标系进行旋转;
18、根据所述相机坐标系与世界坐标系之间的夹角,将所述旋转后的所述相机坐标系进行再次旋转,得到所述世界坐标系;
19、确定所述世界坐标系下特征点的抬升量和横移量;
20、根据所述世界坐标系下特征点的抬升量,确定所述轮对的抬升量;
21、根据所述世界坐标系下特征点的横移量,确定所述轮对的横移量。
22、根据本发明提供的一种列车轮对运动状态检测方法,在所述基于霍夫变换方法从所述点云数据中提取所述钢轨的特征点之前,还包括:
23、基于统计滤波算法去除所述点云数据中的离群点;和/或,
24、基于拉普拉斯滤波法对所述点云数据进行降噪。
25、根据本发明提供的一种列车轮对运动状态检测方法,所述基于统计滤波算法去除所述点云数据中的离群点,包括:
26、对于每时刻的所述点云数据中的各数据点,从每时刻的所述点云数据中查找与所述各数据点距离最近的预设个数的数据点;
27、确定查找的所述数据点与所述各数据点之间的第一平均距离;
28、确定所有所述数据点对应的第一平均距离的标准差和第二平均距离;
29、根据所述标准差和所述第二平均距离,确定所述第一平均距离的范围;
30、在所述第一平均距离不处于所述范围内的情况下,将所述第一平均距离对应的数据点作为离群点从所述点云数据中去除。
31、本发明还提供一种列车轮对运动状态检测装置,包括:
32、获取模块,用于使用列车上的三维激光轮廓扫描仪获取列车的轮对所在处钢轨的点云数据;
33、提取模块,用于基于霍夫变换方法从所述点云数据中提取所述钢轨的特征点;
34、确定模块,用于基于牛顿迭代法确定所述特征点的运动状态,根据所述特征点的运动状态确定所述列车的轮对的运动状态。
35、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述列车轮对运动状态检测方法。
36、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述列车轮对运动状态检测方法。
37、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述列车轮对运动状态检测方法。
38、本发明提供的列车轮对运动状态检测方法及装置,通过利用三维激光轮廓扫描仪获得钢轨的点云数据,使用霍夫变换方法从点云数据中准确提取钢轨的特征点,基于牛顿迭代法还原特征点的运动变化,从而准确检测列车轮对的运动状态,且检测设备和方法简单,提高检测效率,降低检测成本。
技术特征:
1.一种列车轮对运动状态检测方法,其特征在于,包括:
2.根据权利要求1所述的列车轮对运动状态检测方法,其特征在于,所述基于霍夫变换方法从所述点云数据中提取所述钢轨的特征点,包括:
3.根据权利要求1所述的列车轮对运动状态检测方法,其特征在于,所述基于牛顿迭代法确定所述特征点的运动状态,包括:
4.根据权利要求3所述的列车轮对运动状态检测方法,其特征在于,在所述基于牛顿迭代法对所述方程组求解,得到所述特征点的抬升量、横移量和转动角度之前,还包括:
5.根据权利要求3所述的列车轮对运动状态检测方法,其特征在于,所述根据所述特征点的运动状态确定所述列车的轮对的运动状态,包括:
6.根据权利要求1-5任一所述的列车轮对运动状态检测方法,其特征在于,在所述基于霍夫变换方法从所述点云数据中提取所述钢轨的特征点之前,还包括:
7.根据权利要求6所述的列车轮对运动状态检测方法,其特征在于,所述基于统计滤波算法去除所述点云数据中的离群点,包括:
8.一种列车轮对运动状态检测装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述列车轮对运动状态检测方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述列车轮对运动状态检测方法。
技术总结
本发明提供一种列车轮对运动状态检测方法及装置,该方法包括:使用列车上的三维激光轮廓扫描仪获取列车的轮对所在处钢轨的点云数据;基于霍夫变换方法从所述点云数据中提取所述钢轨的特征点;基于牛顿迭代法确定所述特征点的运动状态,根据所述特征点的运动状态确定所述列车的轮对的运动状态。本发明准确检测列车轮对的运动状态,且检测设备和方法简单,提高检测效率,降低检测成本。
技术研发人员:孙丽霞,江桦,胡晓依,常崇义,周春阳,成棣,华泽玺,池长欣,赵光伟,赵明静,王林祯,谭闵瀚,胡蝶,薛恒,庞艳杰
受保护的技术使用者:中国铁道科学研究院集团有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!