一种基于虚拟编组的列车协同控制方法
本发明涉及列车协同控制,尤其涉及一种列基于虚拟编组的列车协同控制方法。
背景技术:
1、近年来,随着轨道交通发展迅速,大中型城市均已建成了较为完善的轨道交通网络。编队列车之间通过控制策略之间的协同作用实现安全防护及紧追踪运行,然而,在上下班高峰期或节假日乘客出行需求激增时,客流时空分布复杂多变,导致轨道交通网络出现运力不足现象。
2、目前,编队列车协同控制方法主要有两种,一种是基于移动闭塞模式追踪运行方法,该方法中列车根据计轴器、应答器、速度传感器等设备计算得到自身的位置、速度等状态信息,并将车-地通信网络发送到无线闭塞中心;无线闭塞中心根据线路运行条件以及前方列车运行状态信息生成后车行车许可,计算后车安全防护曲线;列车根据安全防护曲线以及行车许可终点位置计算行车曲线指定控车策略追踪运行。但是,在移动闭塞模式下,列车根据移动授权及安全防护曲线行车,列车之间无控制策略上的协同、缺乏互操作性;此外,由于列车只能通过移动闭塞中心发送的移动授权获取允许运行的范围,无法直接获取与前方列车之间的实时安全距离,因此为了保障绝对行车安全,列车安全追踪间隔需要设置较大冗余,难以进一步提升线路利用率,进而提升轨道交通运营效率。
3、另一种是基于虚拟编组模式编队运行方法,在虚拟编组下同一线路列车分组编队运行,编队之间根据移动闭塞防护模式在列车自动防护曲线防护下追踪运行,编队内各列车基于虚拟编组模式追踪运行;编队内列车可以通过车车通信(一种重要的列车信息交互手段,使得列车可以直接获取一定范围内的相邻列车实时运行状态以及发送自身运行状态)直接获取通信范围内的前方列车和后方列车速度、位置以及列车驾驶策略等信息,列车基于获取的前方及后方列车的实时运行信息,考虑前方列车和后方列车未来一段时间内的运行状态,综合制定本车驾驶策略;列车之间通过驾驶策略之间的协同,实现安全防护、紧追踪运行,与基于移动闭塞模式追踪运行方法相比,该方法可以进一步缩短安全间隔冗余,提高线路利用率。但是,列车运行环境电磁环境比较复杂,车车通信范围有限,列车只可获取一定范围内的临近列车信息,无法获取线路所有列车全局信息。此外,现有的多列车协同控制方法主要是基于线路列车全局信息采用集中式的计算框架,计算出列车编队中每列车控制策略,然后发送给每辆车分别执行,集中式计算框架对于列车之间通信网络的要求较高,算法复杂度随着编队内列车数量的增加呈指数倍增长,对车载计算资源占用较大难以快速求解,这将导致整体控制性能降低,难以适应实际工程需要。
4、因此,需要提出一种新型基于车车通信技术的虚拟编组模式下的一种基于局部信息的分布式列车编队协同运行控制框架,在保证列车编队协同运行控制性能的前提下,有效减少计算复杂度和控制策略求解时间。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种一种列车虚拟编组运行协同控制方法及系统,其解决了现有的虚拟编组模式编队运行方法中集中式计算框架下算法复杂度高、求解时间长以及难以获取线路所有列车全局信息等问题对列车协同控制性能的影响。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
5、第一方面,本发明实施例提供一种列车虚拟编组运行协同控制方法,包括:
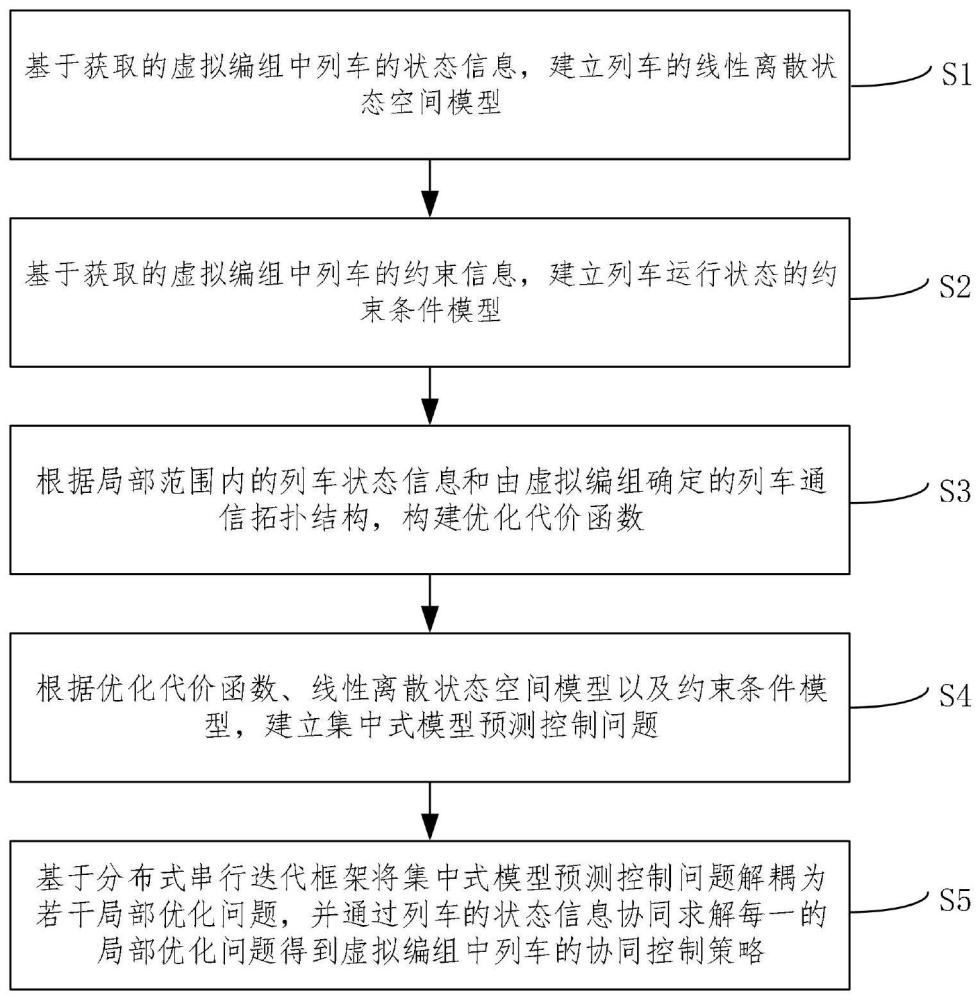
6、基于获取的虚拟编组中列车的状态信息,建立列车的线性离散状态空间模型;
7、基于获取的虚拟编组中列车的约束信息,建立列车运行状态的约束条件模型;
8、根据局部范围内的列车状态信息和由虚拟编组确定的列车通信拓扑结构,构建优化代价函数;
9、根据优化代价函数、线性离散状态空间模型以及约束条件模型,建立集中式模型预测控制问题;
10、基于分布式串行迭代框架将集中式模型预测控制问题解耦为若干局部优化问题,并结合列车的状态信息协同求解每一的局部优化问题得到虚拟编组中列车的协同控制策略。
11、可选地,基于获取的虚拟编组中列车的状态信息,建立列车的线性离散状态空间模型包括:
12、通过获取的虚拟编组中列车的驱动力信息、制动力信息以及运行阻力信息建立列车运动模型;
13、基于戴维斯方程和牛顿第二定律的加速度/减速度表达式将列车运动模型进行简化处理,得到三阶非线性模型;
14、将三阶非线性模型进行线性化处理,得到以列车的位移、速度以及加速度\减速度为状态变量的线性离散状态空间模型;
15、其中,
16、列车运动模型为:
17、
18、式(1)中,pi(t)表示第i辆列车的位移,vi(t)表示第i辆列车的速度,t代表列车运行时刻,fi(t)表示由伺服电机/制动单元基于控制输入产生的实际驱动/制动力,c0、cv、ca表示戴维斯方程系数,τ表示纵向动力学的惯性,mi表示第i辆列车的质量,ηi表示与特定类型列车相关的传动系统的机械效率,fi(t)表示期望的驱动/制动力;
19、戴维斯方程为:
20、
21、牛顿第二定律的加速度/减速度表达式为:
22、
23、三阶非线性模型为:
24、
25、线性离散状态空间模型为:
26、
27、列车运行状态变量:
28、xi(t)=[pi(t),vi(t),ai(t)]t (5.1)
29、离散的控制输入变量:
30、xi(k+1)=a′xi(k)+b′ui(k),i=1,…,n (5.2)
31、
32、
33、式(5)中,ui(t)代表列车的控制输入向量,k表示第k次采样列车状态的时刻,n表示列车总数,a'和b'表示与列车运行相关的系统矩阵,ts表示列车状态的采样周期。
34、可选地,基于获取的虚拟编组中列车的约束信息,建立列车运行状态的约束条件模型包括:
35、获取虚拟编组中两辆相邻列车之间的追踪距离和安全行驶距离;
36、基于追踪距离大于等于安全行驶距离的条件和每一辆虚拟编组列车的极限速度,确定虚拟编组列车在运行过程中的安全距离约束;
37、根据安全距离约束,结合虚拟编组列车的速度限制、加速度/减速度限制以及驱动力\制动力控制输入限制,建立虚拟编组中列车运行状态的约束条件模型;
38、其中,
39、虚拟编组列车在运行过程中的安全距离约束为:
40、
41、式(6)中,pi(k)表示第i辆列车在时刻k的位移,pi+1(k)表示第i+1辆列车在时刻k的的位移,lre表示两辆相邻列车在任何运行情况下需要保持的最小冗余距离,tbr表示简化表达式结构的恒定系数,vi(k)表示第i个列车的在时刻k的速度,vi+1(k)表示第i+1个列车的在时刻k的速度;
42、列车运行状态的约束条件模型为:
43、
44、式(7)中,xi表示列车运行状态向量,ui表示列车驱动力\制动力控制输入向量,r+表示正数的集合,xi表示列车运行状态向量的约束,ui表示列车驱动力\制动力控制输入向量的约束,vi,max表示第i辆列车的最大行驶速度,bmax表示最大制动减速度,amax,i表示第i辆列车的最大驱动加速度,umix,i表示第i辆列车的最小驱动力\制动力控制输入向量,umax,i表示第i辆列车的最大驱动力\制动力控制输入向量。
45、可选地,根据局部范围内的列车状态信息和由虚拟编组确定的列车通信拓扑结构,构建优化代价函数包括:
46、将虚拟编组中列车的底层信息交换结构建模为通信拓扑结构;
47、根据通信拓扑结构,获取虚拟编组中局部范围内的列车集合;
48、通过获取的虚拟编组的参考速度曲线,确定列车的参考速度和列车的参考控制输入向量;
49、通过代数riccati方程求取得到的权重矩阵,结合局部范围内的列车状态信息、列车的参考速度以及列车的参考控制输入向量构建每一辆列车的优化代价函数;
50、其中,
51、通信拓扑结构为:
52、g={v,e,a} (8)
53、式(8)中,v={v′1,v′2,…,v′n}表示列车集合,表示边(v′i,v′j)的集合,边(v′i,v′j)表示列车i和列车j可以相互通信,a是图g的邻接矩阵;
54、虚拟编组中局部范围内的列车集合为:
55、n″i={v′j|j=i-1,i+1,i+2} (9)
56、虚拟编组的参考速度曲线为:
57、x0(k+1)=a′x0(k)+b′u0(k) (10)
58、式(10)中,x0(k)表示列车的参考速度,u0(k)表示列车的参考控制输入向量;
59、代数riccati方程为:
60、
61、式(11)中,ri表示优化代价函数中控制输入的权重矩阵,qi表示优化代价函数中的中间列车状态的权重矩阵,pi表示优化代价函数中的终端列车状态的权重矩阵,hi表示代数riccati方程对应的解,h表示增益矩阵,hit表示矩阵hi的转置;
62、每一辆列车的优化代价函数为:
63、
64、式(12)中,np表示列车在虚拟编组中的预测区间,d0=[l,0,0]t,l表示恒定列车间距策略,表示从当前时刻k开始,在k+j时刻第i辆列车运行状态向量,表示从当前时刻k开始,在k+j时刻第i辆列车响应的控制输入向量。
65、可选地,根据优化代价函数、线性离散状态空间模型以及约束条件模型,建立集中式模型预测控制问题包括:
66、从线性离散状态空间模型获取虚拟编组中列车的离散的状态变量;
67、从约束条件模型中获取获取列车运行状态向量的约束和列车驱动力\制动力控制输入向量的约束;
68、基于虚拟编组中每一辆列车的优化代价函数,建立集中式模型预测控制问题;
69、其中,集中式模型预测控制问题为:
70、
71、满足
72、
73、式(13)中,s1=[1 tbr 0],s2=[1 0 0]。
74、可选地,局部优化问题为:
75、
76、满足
77、
78、式(14)中,表示局部优化代价函数的加权和,wi≥0,wi表示加权系数,表示第i+1辆列车的假设控制输入向量,表示第i+1辆列车的假设运行状态向量,表示从当前时刻k开始k+j时刻的第i-1辆列车的最优运行状态向量,表示从当前时刻k开始k+j时刻的第i+2辆列车的虚拟运行状态向量,表示从当前时刻k开始k+j时刻的第i+1辆列车的假设运行状态向量,表示从当前时刻k开始k+j时刻的第i+1辆列车响应的假设控制输入向量,表示第i辆列车的虚拟优化代价函数,表示第i辆列车的虚拟运行状态向量,表示第i辆响应的虚拟控制输入向量,表示在时刻k的上一时刻的第i辆列车的最优运行状态向量,x0(k-1|k-1)表示在时刻k的上一时刻的列车参考速度,为在时刻k的上一时刻的第i辆列车的响应的最优控制输入向量,u0(k-1|k-1)表示列车的参考控制输入向量。
79、可选地,列车的虚拟运行状态向量是通过当前列车在上一时刻的最优运行状态向量求取得到的,列车的虚拟运行状态向量是通过当前列车在上一时刻的最优控制输入向量求取得到的;
80、列车列车的虚拟控制输入向量为:
81、
82、式(14)中,κi表示第i辆列车的终端控制率;
83、列车的虚拟运行状态向量为:
84、
85、可选地,当i=1时,去除局部优化问题(14)中条件约束(17),得到该列车的局部优化问题
86、ui(k+j|k)∈ui,xi(k+j|k)∈xi(17)
87、当i=n-1时,去除局部优化问题(14)中条件约束(18),得到该列车的局部优化问题
88、
89、当i=n时,控制所述加权系数wi为0,去除局部优化问题(14)中条件约束(19)得到该列车的局部优化问题
90、
91、可选地,通过列车的状态信息协同求解每一的局部优化问题得到虚拟编组中列车的协同控制策略包括:
92、通过获取的当前列车在虚拟编组中的位置信息,接收局部范围内的列车的当前运行状态向量、最优运行状态向量以及虚拟运行状态向量中的一种运行状态向量;
93、通过列车的运行状态向量协同求解当前列车的局部优化问题,得到当前列车的最优运行状态向量和最优控制输入向量;
94、依据当前列车的最优运行状态向量和最优控制输入向量,求取下一时刻当前列车的虚拟运行状态向量和虚拟控制输入向量;
95、在将当前列车的最优运行状态向量传输至相邻的下一辆列车后,遍历虚拟编组中每一辆列车的控制预测,输出列车的协同控制策略。
96、可选地,通过获取的当前列车在虚拟编组中的位置信息,接收局部范围内的列车的当前运行状态向量、最优运行状态向量以及虚拟运行状态向量中的一种运行状态向量包括:
97、判断当前列车在虚拟编组中的位置;
98、若当前列车为虚拟编组中的第一辆列车时,则接收当前列车后第一辆列车的当前运行状态向量和当前列车后第二辆列车的虚拟运行状态向量;
99、若当前列车为虚拟编组中第一辆列车与最后一辆之间的任意一辆列车时,则接收当前列车后第一辆列车的当前运行状态向量、当前列车后第二辆列车的虚拟运行状态向量以及当前列车前第一辆列车的最优运行状态向量;
100、若当前列车为虚拟编组中的最后一辆列车时,则接收当前列车前第一辆列车的最优运行状态向量。
101、(三)有益效果
102、本发明的有益效果是:本发明采用分布式串行迭代框架将根据优化代价函数、线性离散状态空间模型以及约束条件模型建立集中式模型预测控制问题进行解耦后,在优化本车控制性能的同时也兼顾局部范围内的列车控制性能的影响,协同优化列车编队的驾驶策略的技术方案。与现有相比较,本发明中列车在求解自身驾驶策略时综合考虑了自身控制性能及局部范围内的列车控制性能的影响,有效降低了串行迭代求解框架所制定驾驶策略对于全局控制性能的保守性,降低对通信系统的要求。
- 还没有人留言评论。精彩留言会获得点赞!