车辆控制装置的制作方法
[0001]
本发明涉及对车辆的驾驶进行自动控制的车辆控制装置。
背景技术:
[0002]
在车载系统中搭载有多种多样的电子器件。伴随着近年来的电子器件的多功能化、复杂化,用于控制这些电子器件的被称为ecu(electronic control unit:电子控制单元)的车载控制装置的搭载数不断增加。特别是在近来研究开发不断加速的自动驾驶系统中,设计了通过使车辆的发动机控制、制动控制、转向控制协作从而实现高度的自动驾驶的系统。
[0003]
在有效用于自动驾驶的电动动力转向控制装置(转向控制装置)中,在系统的一部分产生故障的情况下,需要实现故障操作(fail operation)工作。另外,在故障操作也较困难的情况下,需要使用故障对象以外的功能,利用最低极限的功能来实现故障保护。
[0004]
有时搭载有对转向控制装置的控制进行限制的功能,使得即便在转向控制装置中产生了异常的情况下也不进行意外的转向操作。例如,在专利文献1中,通过得到能够从导航装置得到的本车的行驶路径的道路信息,从而根据道路信息对作为目标的转向角设置限制。另外,在专利文献2中公开了如下方法:检测用转向控制装置运算的致动器的输出电流,并检测异常输出。
[0005]
现有技术文献
[0006]
专利文献
[0007]
专利文献1:国际公开第2017/077807号
[0008]
专利文献2:日本特开2015-209140号公报
技术实现要素:
[0009]
发明要解决的课题
[0010]
在专利文献1中,虽然为了不进行意外的转向操作而对作为目标的转向角设置限制,但在转向控制装置的致动器工作量的运算部本身产生故障的情况下,可认为不论作为目标的转向角如何,都有可能进行意外的输出。另外,在专利文献2中,通过将用转向控制装置运算的致动器的输出电流与阈值进行比较,从而能够将输出电流过大的状态检测为异常。但是,当自动驾驶高度自动化时,除了高速公路这样的直线道路的行驶以外,还会产生在一般道路上的左右转向时及驻车时等需要各种大小的转向操作的用例,因此存在如下课题:当使用固定的阈值时,不能进行适当的控制。并且,在专利文献2中,虽然监视输出电流的上限,但没有提及下限的监视,因此也存在如下课题:例如不能应对在弯道行驶中不进行转向这样的状况。
[0011]
本发明为解决上述问题而做出,其目的在于提供能够适当地设定转向控制量的阈值的车辆控制装置。
[0012]
用于解决课题的手段
[0013]
本发明的车辆控制装置具备:自动驾驶控制装置,所述自动驾驶控制装置基于车辆的周边环境信息及位置信息决定执行自动驾驶时的行驶路径,并输出与该行驶路径对应的控制目标值;以及转向控制装置,所述转向控制装置基于所述控制目标值运算转向控制量,基于所述转向控制量进行所述车辆的转向控制,所述自动驾驶控制装置基于自动驾驶控制信息动态地决定控制量阈值并提供给所述转向控制装置,所述自动驾驶控制信息表示所述车辆的自动驾驶中的控制状态,所述控制量阈值规定所述转向控制量的极限,所述转向控制装置在所述转向控制量超过所述控制量阈值的情况下,以不超过所述控制量阈值的方式变更所述控制量。
[0014]
发明的效果
[0015]
根据本发明的车辆控制装置,能够适当地设定转向控制的控制量阈值,能够兼顾自动驾驶中的功能性的扩展和安全性。
附图说明
[0016]
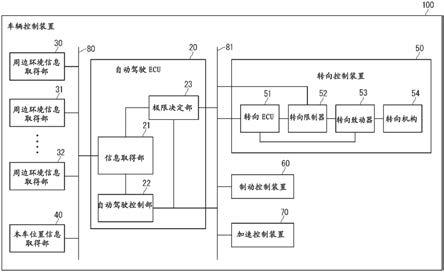
图1是示出本发明的实施方式1的车辆控制装置的结构的功能框图。
[0017]
图2是示出本发明的实施方式1的车辆控制装置的控制量阈值的决定工作的流程图。
[0018]
图3是说明本发明的实施方式1的车辆控制装置中的控制状态的转变例的图。
[0019]
图4是示出用于决定本发明的实施方式1的车辆控制装置的控制量阈值的表的一例的图。
[0020]
图5是说明在本发明的实施方式1的车辆控制装置中进行控制量阈值的校正的条件的图。
[0021]
图6是说明在本发明的实施方式1的车辆控制装置中进行控制量阈值的校正的条件的图。
[0022]
图7是说明在本发明的实施方式1的车辆控制装置中进行控制量阈值的校正的条件的图。
[0023]
图8是说明在本发明的实施方式1的车辆控制装置中进行控制量阈值的校正的条件的图。
[0024]
图9是示出路肩宽度与校正系数的关系的图。
[0025]
图10是示出路面摩擦系数与校正系数的关系的图。
[0026]
图11是示出车速与校正系数的关系的图。
[0027]
图12是示出本发明的实施方式1的车辆控制装置的自动驾驶ecu的硬件结构的框图。
[0028]
图13是示出本发明的实施方式1的车辆控制装置的自动驾驶ecu的硬件结构的框图。
[0029]
图14是示出本发明的实施方式2的车辆控制装置的结构的功能框图。
[0030]
图15是示出本发明的实施方式2的车辆控制装置的控制量阈值的决定工作的流程图。
[0031]
图16是示出本发明的变形例的车辆控制装置中的极限决定部的异常检测时的工作的流程图。
[0032]
图17是示出本发明的变形例的车辆控制装置中的接收到异常检测的通知后的自动驾驶控制部的工作的流程图。
具体实施方式
[0033]
<实施方式1>
[0034]
图1是示出本发明的实施方式1的车辆控制装置100的结构的功能框图。如图1所示,车辆控制装置100具备:搭载于车辆并取得车辆的周边环境的信息的多个周边环境信息取得部30、31及32;基于从取得本车位置信息的本车位置信息取得部40输出的周边环境信息及本车位置信息控制自动驾驶的自动驾驶ecu20(自动驾驶控制装置);以及由自动驾驶ecu20控制的转向控制装置50、制动控制装置60及加速控制装置70。
[0035]
周边环境信息取得部30~32及本车位置信息取得部40经由网络80与自动驾驶ecu20连接,转向控制装置50、制动控制装置60及加速控制装置70经由网络81与自动驾驶ecu20连接。
[0036]
作为周边环境信息取得部30~32,除了相机、毫米波雷达、声呐等各种传感器之外,还可列举车车间-路车间通信模块等。此外,在图1中,作为周边环境信息取得部30~32,例示了三个,但不限定于此。另外,作为本车位置信息取得部40,可列举gps(global positioning system:全球定位系统)信号等的接收装置及绝对位置精度为厘米级的高精度地图信息的接收装置等。
[0037]
自动驾驶ecu20具备信息取得部21、自动驾驶控制部22及极限决定部23,信息取得部21经由网络80从周边环境信息取得部30~32及本车位置信息取得部40分别取得周边环境信息及本车位置信息并汇集信息。汇集的信息输入到自动驾驶控制部22中。
[0038]
在自动驾驶控制部22中,基于输入的信息,决定执行自动驾驶时的本车应行进的行驶路径,运算与该行驶路径对应的目标转向角并作为自动驾驶ecu20的输出,并输入到转向控制装置50中。在转向控制装置50中,基于输入的目标转向角,运算用于使转向致动器53工作的转向控制量(转矩量)。为了实现自动驾驶,也从自动驾驶ecu20向制动控制装置60及加速控制装置70发送目标制动量、目标加速量,通过由制动控制装置60及加速控制装置70分别进行致动器控制从而实现自动驾驶。从自动驾驶ecu20输出的目标转向角、目标制动量、目标加速量成为用于实现自动驾驶的控制目标值。
[0039]
极限决定部23从信息取得部21取得本车周边的道路信息及障碍物信息,并且从自动驾驶控制部22取得表示通过自动驾驶怎样控制本车的信息。将该信息称为自动驾驶控制信息。在由自动驾驶控制部22生成的自动驾驶控制信息中,例如包含用于判定直线行驶中、弯道行驶中、车道变更中、左右转向中及自动驻车中等控制状态的状态信息。另外,在自动驾驶控制信息中也可以包含目标转向角、目标制动量、目标加速量等控制目标值。极限决定部23基于这些控制信息,判断本车的以后的目标转向角,与该目标转向角对应地决定控制量阈值,所述控制量阈值规定用转向控制装置50运算的转向控制量的上限值及下限值。另外,极限决定部23将所决定的控制量阈值输入到转向控制装置50内的转向限制器52中。该控制量阈值是针对转向致动器53的转向控制量(转矩量)的阈值。例如,在驱动致动器的电机的电流值与转向控制量(转矩量)对应的情况下,控制量阈值成为针对电机的电流值的阈值。
[0040]
转向控制装置50具有转向ecu51、转向限制器52、转向致动器53及转向机构54。在转向控制装置50中,在转向ecu51中,基于从自动驾驶ecu20输入的控制目标值(目标转向角),运算驱动转向致动器53的转向控制量(转矩量),并输入到转向限制器52及转向致动器53中。
[0041]
在转向限制器52中,检测输入的转向致动器53的转向控制量(转矩量)是否超过从极限决定部23输入的控制量阈值,在超过控制量阈值的情况下,以落在不超过控制量阈值的范围内的方式进行变更。例如,变更为与控制量阈值对应的值。然后,用变更后的转向控制量(转矩量)所对应的电机电流驱动转向致动器53,成为与转向致动器53机构连接的转向机构54的转向转矩而用于转向控制。由此,能够防止车辆进行危险的控制。
[0042]
此外,在转向致动器53的转向控制量(转矩量)不超过控制量阈值的情况下,用从转向ecu51直接输入到转向致动器53的转向控制量(转矩量)所对应的电机电流驱动转向致动器53。转向致动器53在从转向ecu51及转向限制器52双方输入转向控制量(转矩量)的情况下,选择从转向限制器52输入的转向控制量(转矩量)。此外,在此,将转向控制量例示为转矩量,但转向控制量也可以是电机电流。
[0043]
在图2中示出极限决定部23决定控制量阈值的工作的流程图。本流程以一定的周期执行,但也可以与自动驾驶控制部22的执行周期相匹配地执行。在此,上述一定的周期是指自动驾驶控制部22向转向控制装置50、制动控制装置60及加速控制装置70发送目标转向角、目标制动量、目标加速量的周期,自动驾驶控制部22的执行周期是指决定一个目标转向角的周期。
[0044]
如图2所示,极限决定部23首先在步骤s101中从信息取得部21及自动驾驶控制部22取得周边环境信息、本车位置信息及自动驾驶控制信息,确认周边状况、当前及以后的本车控制状态及本车速度。
[0045]
接着,在步骤s102中,判别与后述的阈值的变更相伴随的本车的周边状况、控制状态及本车速度中的任一个是否有变化。然后,在判别为有变化的情况下,在步骤s103中,选择控制量阈值(上限值及下限值)并转移至步骤s104。选择方法通过参照后述的表来决定。另一方面,在判别为没有变化的情况下,维持控制量阈值并结束一系列的工作。
[0046]
在步骤s104中,根据周边状况及本车的行驶速度,校正在步骤s103中选择的控制量阈值。将在后面说明校正的方法。
[0047]
接着,在步骤s105中,向转向限制器52通知校正后的控制量阈值。此外,由于步骤s104中的校正不是必须的处理,所以在不设置步骤s104的情况下,在步骤s103中选择的控制量阈值被通知给转向限制器52。
[0048]
在图3中示出控制状态的转变例。如图3所示,控制状态大致分为停车中c1、手动行驶中c2、自动驻车中c3及自动行驶中c4。
[0049]
在点火装置(ig)接通(on)的时刻,车辆处于停车中c1。另外,自动行驶中c4分类为在直线道路或弯道曲率较小(小于r1)的道路上行驶中的直线(曲率<r1)行驶中c41、在平缓的弯道道路上行驶中的弯道(r1≤曲率<r2)行驶中c42、在较急的弯道道路上行驶中的弯道(r2≤曲率)行驶中c43及进行左右转向的左右转向中c44。
[0050]
并且,直线(曲率<r1)行驶中c41分类为行车道变换c411及通常行驶c412。另外,弯道(r1≤曲率<r2)行驶中c42分类为行车道变换(弯道方向)c421、行车道变换(弯道反方向)
c422及通常行驶c423。另外,弯道(r2≤曲率)行驶中c43分类为行车道变换(弯道方向)c431、行车道变换(弯道反方向)c432及通常行驶c433。
[0051]
上述本车的控制状态由极限决定部23基于来自信息取得部21及自动驾驶控制部22的信息判定。在来自信息取得部21的信息中包含本车周边的地图信息、本车周边的障碍物的信息及本车位置信息,例如,从地图信息取得本车正在怎样的道路上行驶或以后在怎样的道路上行驶,判定是否为直线、是否为弯道、弯道的曲率、弯道的方向等。在来自自动驾驶控制部22的信息中包含用于判定是否为自动行驶中、是否为自动驻车中这样的控制状态的自动驾驶控制信息。由极限决定部23判定的控制状态是使用来自信息取得部21的信息,将自动驾驶控制信息中包含的状态信息更详细化而得到的状态。
[0052]
另外,在周边环境信息中包含前车信息,关于行车道变换,例如在前车的速度较慢且来自自动驾驶控制部22的自动驾驶控制信息中包含“进行超车”这样的信息的情况下及包含本车在稍前方的十字路口“右转”这样的信息的情况下,判定为向右侧车道进行行车道变换。
[0053]
自动驻车中c3分类为通常的移动时的通常移动c31及执行打轮移位(日文:切
り
返
し
)控制的打轮移位c32。通过定义这样的状态转变,从而极限决定部23在图2的步骤s102中判断状态变化的有无。即,在由自动驾驶控制部22生成的自动驾驶控制信息中包含这些控制状态的信息,极限决定部23基于该信息判断状态变化的有无。这样,极限决定部23在控制状态变化的情况下,决定与变化后的控制状态对应的控制量阈值。
[0054]
在图4中示出用于决定控制量阈值的表的一例。极限决定部23在图2的步骤s103中基于自动驾驶控制信息选择控制量阈值时参照图4的表。
[0055]
在图4所示的表中,在图3中定义的本车的控制状态和与控制状态对应的控制量阈值的上限值及下限值表示为与转向致动器53的转矩量对应的电机电流值。
[0056]
例如,在车辆为小于曲率r1的直线行驶中的情况下,由于不存在需要较大的转向的可能性,所以上限值设定为l1
high
这样的值作为为了确保车辆的稳定性而能够实施充分的控制的较低的阈值。另外,由于也有可能几乎不进行转向控制,所以不设定作为下限值的阈值。
[0057]
在根据行驶环境的变化而变化为曲率为r1以上且小于r2的弯道行驶的情况下,在阈值上追加与沿弯道行驶所需的转向力相当的量的电机电流值,设定l1
high
+l2
high
作为上限值,为了防止不进行转向控制而与壁面碰撞,设定l2
low
作为下限值。根据在弯道行驶时与弯道的曲率相匹配地维持方向盘所需的转向保持力来决定l2
low
的值。
[0058]
并且,在较大的曲率(r2以上)的弯道的情况下,设定l1
high
+l3
high
作为上限值,设定l3
low
作为下限值。在此,由于弯道的曲率变得越大,则弯道行驶所需的电机电流值变得越大,所以l2
high
与l3
high
的关系成为l2
high
<l3
high
。另外,关于下限值,也成为l2
low
<l3
low
。这样,通过设为能够根据弯道的曲率变更控制量阈值,从而能够进行更适当的转向控制。
[0059]
另外,在直线行驶中进行行车道变换时,进行比直线行驶时大的转向,因此,作为上限值,在直线行驶时的上限值l1
high
上追加通过行车道变换的转向而可能产生的控制量阈值的最大值l4
high
,设定为l1
high
+l4
high
。此外,关于下限值,在基于行车道变换的转向的开始及结束时返回到直线行驶的转向,因此不设定阈值。
[0060]
另外,在曲率为r1以上且小于r2的弯道中的行车道变换时,根据进行行车道变换
的方向来设定阈值。在与弯道相同的方向上进行行车道变换的情况下,作为上限值,设定在弯道行驶时的上限值上加上通过行车道变换的转向而可能产生的控制量阈值的最大值l4
high
而得到的l1
high
+l2
high
+l4
high
,作为下限值,设定弯道行驶时的下限值l2
low
。
[0061]
另外,在与弯道相反的方向上进行行车道变换的情况下,不会成为比弯道行驶时大的控制量阈值,所以设定与弯道行驶时相同的上限值l1
high
+l2
high
。此外,关于下限值,在图4中设定与弯道行驶时相同的下限值,但也可以设定比l2
low
小的值,或者也可以不设定下限值。
[0062]
在曲率为r2以上的弯道中的行车道变换时,在与弯道相同的方向上进行行车道变换的情况下,作为上限值,设定为l1
high
+l3
high
+l4
high
,作为下限值,将l3
low
设定为控制量阈值。另外,在与弯道相反的方向上进行行车道变换的情况下,作为上限值,设定与弯道行驶时相同的上限值l1
high
+l3
high
,作为下限值,设定l3
low
。
[0063]
另外,在左右转向中,设定l5
high
作为上限值,不设定下限值。在驻车中,在通常移动时及打轮移位时,将上限值分别设定为l6
high
及l7
high
这样的不同的控制量阈值,不设定下限值。这是因为,在驻车中的情况下,由于在车辆打轮移位时和通常移动时转向的转向量较大地不同,所以根据状况而设为不同的控制量阈值。需要说明的是,图4所示的控制量阈值的设定为一例,除此之外,也可以根据车辆的状况来设定控制量阈值。
[0064]
通过按这种方式使用用于选择控制量阈值的表,从而控制量阈值的设定变得容易。
[0065]
接着,使用图5~图8,说明在直线行驶中极限决定部23进行控制量阈值的校正的条件。能够考虑作为安全分析的结果而得到的、从设想的异常的产生到车辆产生危险事态为止的时间(ftti:fault tolerant time interval:故障容错时间间隔)及路面状况来决定该校正。
[0066]
关于ftti,根据车辆的周边状况而变化。例如,在设想从自动驾驶ecu20提供的目标转向角的数据在转向ecu51中变化,成为在直线行驶中行进路线突然变化的转向状态的情况下,ftti根据到与障碍物例如护栏碰撞为止的距离是长还是短而变化。图5表示车辆以速度v=60km/h行驶于从车道到护栏gr的宽度即路肩宽度没有富余且设想为干的路面的路面摩擦系数μ=0.8的道路的状况。在该状况下,即使是由意外的转向导致的稍微的横向移动,与护栏gr碰撞的可能性也较高,所以不校正在步骤s103中选择的控制量阈值的上限值l1
high
。
[0067]
另一方面,在如图6所示路肩宽度有富余的情况下,即使以相同的速度v=60km/h行驶,在因意外的转向而与护栏gr碰撞之前也有时间上的富余,所以也可以进行增大控制量阈值(上限值)这样的校正。如以上那样,可认为ftti越短,则较小的横向的变化导致危险的可能性越高,所以极限决定部23减小或不变更控制量阈值。
[0068]
另外,作为极限决定部23进行控制量阈值的校正的条件,也能够使用作为周边状况而推定出的路面状态。图7表示车辆以速度v=60km/h行驶于设想为湿的路面的路面摩擦系数μ=0.5的道路的状况。在如图7所示行驶于路面摩擦系数μ较低的路面(低μ道路)的情况下,即使是由意外的转向导致的较小的转向转矩,也会打滑,有可能与护栏gr碰撞。因此,如果能够推定路面的状态作为周边状况,则在行驶于低μ道路的情况下,极限决定部23以将控制量阈值(上限值)设定为较小的方式进行校正。
[0069]
此外,作为推定路面的状态的方法,例如,能够基于车载相机的影像取得降雨及降雪的信息,推定大致的摩擦系数。另外,也能够考虑气温及湿度来推定路面是否冻结。此外,积雪路面的摩擦系数为0.5~0.2,结冰路面的摩擦系数为0.2~0.1。
[0070]
另外,作为极限决定部23进行控制量阈值的校正的条件,也能够使用本车的速度(车速)。图8表示车辆以速度v=100km/h高速行驶于路面摩擦系数μ=0.8的道路的状况。在如图8所示车辆以100km/h高速行驶中的情况下,即使是由意外的转向导致的较小的转向转矩,也会成为较大的横向的移动,所以以将控制量阈值(上限值)设定为较小的方式进行校正。相反,在低速的情况下,也可以以增大控制量阈值(上限值)的方式进行校正。此外,在图5~图8中基于到与护栏碰撞为止的时间说明了校正方法,但在根据周边环境信息检测到路肩上的行人的情况下,也可以基于与行人的碰撞的可能性进行校正。此外,在路肩宽度包含于地图信息的情况下利用该值,在未包含于地图信息的情况下,也能够根据本车位置、本车的横宽及地图信息的路面宽度进行计算。
[0071]
接着,使用图9~图11,说明进行使用图5~图8说明的控制量阈值的校正的状况下的校正系数与路肩宽度、路面摩擦系数及车速的关系。
[0072]
图9是将横轴设为路肩宽度[m],将纵轴设为校正系数,并用曲线图表示路肩宽度与校正系数的关系的图,将使用图5及图6说明的路肩宽度没有富余的情况和有富余的情况分别作为图5及图6并用箭头示出。
[0073]
如图9所示,路肩宽度即从车辆到障碍物的距离变得越大则越增大校正系数,从而控制量阈值变大。
[0074]
图10是将横轴设为路面摩擦系数,将纵轴设为校正系数,并用曲线图表示路面摩擦系数与校正系数的关系的图,将使用图7及图8说明的路面摩擦系数较小的情况和较大的情况分别作为图7及图8并用箭头示出。
[0075]
如图10所示,路面摩擦系数变得越小则越减小校正系数,从而控制量阈值变小。
[0076]
图11是将横轴设为车速[km/h],将纵轴设为校正系数,并用曲线图表示车速与校正系数的关系的图,将使用图5及图8说明的车速为60km/h的情况和100km/h的情况分别作为图5及图8并用箭头示出。
[0077]
如图11所示,车速变得越大则越减小校正系数,从而控制量阈值变小。
[0078]
此外,图9~11所示的曲线图为一例,曲线图的形状(特征)也不限定于这些,也可考虑:考虑车辆的特性、作用于车辆的力、车辆向横向的移动量、到自动驾驶系统或驾驶员应对为止的时间等进行计算,并采用比例关系、二次曲线、向上凸的形状、向下凸的形状等。
[0079]
极限决定部23通过在图2所示的步骤s104中将上述校正系数乘以控制量阈值,从而校正控制量阈值。
[0080]
如以上说明的那样,通过根据周边状况及本车的控制状态适当地设定转向控制装置50的控制量阈值,从而能够兼顾自动驾驶中的功能性的扩展和安全性。
[0081]
以上说明的自动驾驶ecu20的各结构能够使用计算机构成,这些各结构通过计算机执行程序而实现。即,图1所示的自动驾驶ecu20的信息取得部21、自动驾驶控制部22及极限决定部23例如利用图12所示的处理电路120实现。通过在处理电路120中应用cpu(central processing unit:中央处理单元)、dsp(digital signal processor:数字信号处理器)等处理器并执行存储于存储装置的程序,从而实现上述各结构的功能。
[0082]
此外,在处理电路120中也可以应用专用的硬件。在处理电路120为专用的硬件的情况下,处理电路120例如对应于单一电路、复合电路、程序化的处理器、并行程序化的处理器、asic(application specific integrated circuit:专用集成电路)、fpga(field programmable gate array:现场可编程门阵列)或将它们组合而成的电路等。
[0083]
另外,在图13中示出使用处理器构成图1所示的自动驾驶ecu20的各结构(信息取得部21、自动驾驶控制部22及极限决定部23)的情况下的硬件结构。在该情况下,自动驾驶ecu20的各结构的功能通过与软件等(软件、固件或者软件和固件)的组合而实现。软件等记述为程序,并存储于存储器122。作为处理电路120发挥功能的处理器121通过读出并执行存储于存储器122(存储装置)的程序,从而实现各部分的功能。
[0084]
<实施方式2>
[0085]
图14是示出本发明的实施方式2的车辆控制装置200的结构的功能框图。图14所示的车辆控制装置200与图1所示的车辆控制装置100的不同点在于如下点:向自动驾驶ecu20中的极限决定部23的输入仅为来自自动驾驶控制部22的输入。即,在实施方式2的车辆控制装置200中,极限决定部23进行的控制量阈值的决定根据自动驾驶控制部22作为自动驾驶控制信息而输出的控制目标值来决定。
[0086]
图15示出极限决定部23决定控制量阈值的工作的流程图。本流程以一定的周期执行,但也可以与自动驾驶控制部22的执行周期相匹配地执行。
[0087]
如图15所示,极限决定部23首先在步骤s201中取得用自动驾驶控制部22运算而得到的向转向控制装置50输入的目标转向角(控制目标值)作为自动驾驶控制信息。
[0088]
在极限决定部23中,预先保持前一周期的目标转向角(控制目标值),并在步骤s202中计算与前一周期的目标转向角的差值,从而能够根据差值来决定应产生的转向致动器53的转向控制量(转矩量)。然后,相对于所决定的转向控制量,例如将大10%的值运算为控制量阈值的上限值,将小10%的值运算为控制量阈值的下限值。此外,上述比率为一例,不限定于此。
[0089]
接着,在步骤s203中,向转向限制器52通知控制量阈值。
[0090]
如以上说明的那样,在本发明的实施方式2的车辆控制装置200中,由于基于向转向控制装置50输入的目标转向角动态地决定转向控制装置50的控制量阈值,所以与将控制量阈值固定的情况相比,能够实现与各种情形对应的自动驾驶。另外,由于设定了控制量阈值,所以也能够确保转向ecu51的故障时的安全性。
[0091]
<变形例>
[0092]
在以上说明的实施方式1及实施方式2中,极限决定部23向转向限制器52发送动态地生成的控制量阈值,从而在转向限制器52中,检测转向致动器53的转向控制量(转矩量)是否超过控制量阈值,在超过控制量阈值的情况下,以落在不超过控制量阈值的范围内的方式变更转向控制量。在此基础上,在本变形例中,具备如下功能:即使在以落在不超过控制量阈值的范围内的方式变更了转向控制量的情况下,在转向限制器52检测到超过控制量阈值的范围的电机电流值的情况下,也将由转向限制器52检测到异常的情况通知给自动驾驶控制部22。
[0093]
在图16中示出转向限制器52中的异常检测的流程图。如图16所示,在转向限制器52中,在步骤s301中,在检测到转向致动器53的电机电流值超过控制量阈值的情况下,判断
为由转向限制器52检测到异常,转移至步骤s302。另一方面,在转向致动器53的转向控制量(转矩量)小于控制量阈值的情况下,结束一系列的处理。
[0094]
在步骤s302中,向自动驾驶控制部22通知检测到异常的情况,结束一系列的处理。
[0095]
此外,检测到超过控制量阈值的范围的电机电流值的情况可认为是从自动驾驶ecu20提供的控制目标值的数据例如由于电气噪声而丢失或变化的情况或者是转向ecu51内的存储器破坏等转向ecu51产生了故障的情况。
[0096]
图17是示出从转向限制器52接收到异常检测的通知后的自动驾驶控制部22的工作的流程图。如图17所示,接收到异常检测的通知的自动驾驶控制部22在步骤s401中基于从信息取得部21输入的周边环境信息确认周边状况,在步骤s402中决定用于确保本车辆的安全的目标转向角、目标制动量、目标加速量。
[0097]
如果在本车辆的周围没有障碍物等,则目标转向角、目标制动量、目标加速量成为实现踩下制动器而停止的工作及停止加速器的控制的工作的控制目标值。另外,当在本车辆的周围有障碍物的情况下,成为能够避开障碍物的范围内的控制目标值、例如在维持本车辆与前后的车辆的车距的状态下实现缓慢踩下制动器而停止的工作的控制目标值。
[0098]
在步骤s402中决定的控制目标值在步骤s403中发送给制动控制装置60及加速控制装置70,实现车辆控制。
[0099]
如以上说明的那样,通过进行本变形例这样的控制,例如即使在转向ecu51产生了异常的情况下,也能够一边保持安全一边使车辆停止。
[0100]
虽然详细说明了本发明,但上述说明在所有方面仅为例示,本发明不限于此。应理解为未例示的无数个变形例是在不脱离本发明范围的情况下能想到的。
[0101]
此外,本发明可以在该发明的范围内对各实施方式自由地进行组合,或对各实施方式适当地进行变形、省略。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1