转向操作元件的制作方法
1.本发明涉及车辆的一种转向操作元件。
背景技术:
2.作为自主车辆的方向盘,有这样一种方向盘,该方向盘包括设置有诸如液晶监视器之类的显示部的环形部(例如,专利文件1)。该方向盘使显示部显示根据转向角在周向上移动的转向角图像,从而使乘员识别转向角。此外,还有一种方向盘,该方向盘包括设置有发光元件的环形部(例如,专利文件2)。该方向盘使发光元件在转向方向上按顺序发光,从而显示车辆的未来轨迹。此外,该方向盘根据偏航率和横向加速度的大小来改变发光的颜色。
3.现有技术文件
4.专利文件
5.专利文件1:日本特开2018
‑
83523号公报
6.专利文件2:国际公开第2015
‑
145674号
技术实现要素:
7.本发明要完成的任务
8.当乘员(驾驶员)监视车辆前部时,如果设置在环形部上的发光元件根据车辆的行为而发光,则光在乘员的视线底部闪烁,这可能使乘员感到厌烦。
9.鉴于以上背景,本发明的一个目的是在车辆的转向操作元件中适当地显示信息,而不会使乘员感到厌烦。
10.完成任务的手段
11.为了实现这样的目的,本发明的一个方面提供一种车辆2的转向操作元件10,所述转向操作元件包括:毂部31,所述毂部相对于车身15能旋转地设置;延伸部32,所述延伸部从所述毂部的外周径向向外延伸;外边缘部33,所述外边缘部设置在所述延伸部的外边缘上;显示器40,所述显示器设置在所述毂部上;至少一个第一光源27a,所述至少一个第一光源设置在所述延伸部上;以及界面控制装置41,所述界面控制装置配置成控制所述显示器和所述第一光源,其中,所述界面控制装置配置成使所述显示器显示与表示所述车辆的状态的车辆状态信息和表示所述车辆的周围环境的环境信息中的至少一者相对应的图像。
12.根据本方面,第一光源不是设置在外边缘部上,而是设置在外边缘部内侧的延伸部上,从而能够防止来自第一光源的光使乘员感到厌烦。此外,设置在毂部上的显示器显示与车辆状态信息相对应的图像,从而可以将信息适当地传递给乘员。
13.在以上方面中,优选地,所述环境信息包括由外部环境识别装置获取并表示所述车辆与所述车辆周围存在的周围车辆之间的相对位置关系的周围车辆信息,并且所述界面控制装置配置成使所述显示器显示表示所述周围车辆信息的第一图像91、92。
14.根据本方面,乘员可以通过检查显示器来识别周围车辆的存在和位置。
15.在以上方面中,优选地,所述界面控制装置配置成根据包括在所述车辆状态信息中并包括关于自主驾驶模式和手动驾驶模式的信息的驾驶模式信息改变所述第一图像。
16.根据本方面,显示器可以将适合于每种驾驶模式的信息传递给乘员。例如,在手动驾驶模式中,乘员视觉监测包括周围车辆在内的外部环境,因此,显示器显示本车辆的状态比显示关于周围车辆的信息更好。
17.在以上方面中,优选地,所述界面控制装置使所述车辆周围的区域在所述自主驾驶模式的情况下比所述手动驾驶模式的情况下更宽,所述区域显示在所述第一图像中。
18.根据本方面,在手动驾驶模式中,显示器可以显示关于本车辆的信息要多于显示关于周围车辆的信息。
19.在以上方面中,优选地,在所述手动驾驶模式的情况下,所述界面控制装置基于所述车辆状态信息确定所述车辆的加速/减速状态,并且根据所述加速/减速状态改变与所述车辆相对应的本车辆图像,所述本车辆图像包括在所述第一图像中。
20.根据本方面,乘员可以基于本车辆图像来识别车辆的加速/减速。
21.在以上方面中,优选地,所述界面控制装置配置成在所述本车辆图像中显示多个物体图像105,所述物体图像的移动速度根据车辆速度变化。
22.根据本方面,乘员可以根据本车辆图像来识别车辆的加速/减速。
23.在以上方面中,优选地,在所述自主驾驶模式的情况下,所述界面控制装置基于所述车辆状态信息获取所述车辆的预期轨迹,并且使所述显示器显示表示所述预期轨迹的第二图像92、102。
24.根据本方面,乘员可以基于显示器上显示的第二图像识别本车辆的行驶方向。
25.在以上方面中,优选地,所述界面控制装置配置成使所述第二图像在所述显示器上位于所述第一图像上方,并且根据所述预期轨迹横向移动所述第二图像。
26.根据本方面,能够通过使用相对较小的空间来显示第二图像。
27.在以上方面中,优选地,至少一个触摸传感器(35至37)设置在所述外边缘部上,并且所述界面控制装置配置成根据所述触摸传感器检测到的操作输入使所述第一光源发光。
28.根据本方面,在不存在乘员对触摸传感器的操作输入的情况下,设置在延伸部上的第一光源不发光。因此,能够防止来自第一光源的光使乘员感到厌烦。
29.在以上方面中,优选地,至少一个第二光源设置在所述外边缘部上,并且所述界面控制装置配置成根据对所述触摸传感器的所述操作输入改变所述第一光源和所述第二光源的发光模式。
30.根据本方面,第一光源和第二光源根据乘员的操作而发光,从而乘员能够识别且操作已经被转向操作元件检测到。另外,当乘员不操作触摸传感器时,第一光源和第二光源不发光,从而乘员不太可能感到厌烦。
31.在以上方面中,优选地,所述界面控制装置配置成基于所述车辆状态信息确定是否生成驾驶干预请求,在所述自主驾驶模式改变为所述手动驾驶模式时生成所述驾驶干预请求,并且所述界面控制装置配置成根据以下情况变更所述第一光源的发光模式,所述情况包括生成所述驾驶干预请求并且检测到与乘员对所述外边缘部的抓握操作对应的所述操作输入的情况以及未生成所述驾驶干预请求并且检测到与所述乘员对所述外边缘部的抓握操作对应的所述操作输入的情况。
32.根据本方面,乘员可以识别出其对驾驶干预请求的响应操作已经被转向操作元件检测到。
33.本发明的效果
34.因此,根据以上方面,在车辆的转向操作元件中,能够适当地显示信息而不使乘员感到厌烦。
附图说明
35.[图1]是根据一个实施方式的车辆控制系统的框图;
[0036]
[图2]是转向操作元件的侧视图;
[0037]
[图3]是转向操作元件的正视图;
[0038]
[图4]是示出设置在转向操作元件中的第一电容传感器至第三电容传感器之间的位置关系的说明图;
[0039]
[图5]是转向操作元件的外边缘部(环形部)的剖视图(沿图3的线v
‑
v剖切的剖视图);
[0040]
[图6]是显示在显示器上的图像,(a)门打开时图像;(b)停止时图像;(c)自主驾驶时图像;(d)手动驾驶时图像;
[0041]
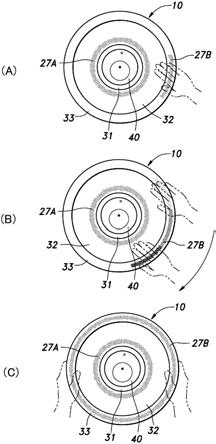
[图7]示出转向操作元件响应于以下操作的发光模式的说明图:(a)自主驾驶期间的单击操作;(b)自主驾驶期间的划动操作;(c)在生成驾驶干预请求时的抓取操作。
具体实施方式
[0042]
下文中,将参照图示描述根据本发明的一个实施方式的车辆控制系统。如图1中所示,车辆控制系统1设置在能够自主驾驶的车辆2中。车辆2可以在其中乘员主要进行驾驶操作的手动驾驶模式下行驶或者在其中车辆2主要进行驾驶操作的自主驾驶模式下行驶。如图1中所示,车辆2包括:转向装置4,其配置成使车辆2的车轮转向;驱动装置5,其配置成使车轮旋转;以及制动装置6,其配置成对车轮的旋转实施制动。
[0043]
车辆控制系统1包括:转向操作元件10,其设置有各种传感器;以及行驶控制装置11,其配置成根据来自转向操作元件10的信号控制转向装置4、驱动装置5和制动装置6中的至少一者。转向操作元件10是配置成接收乘员的输入操作以操纵车辆2的装置。转向操作元件10可以包括例如方向盘或控制杆。转向操作元件10的轮廓可以形成为诸如圆形形状、矩形形状、通过切断圆的一部分而形成的形状或者通过结合左、右弧形部分和上下直线部分而形成的形状之类的形状。
[0044]
如图2中所示,转向操作元件10经由支撑装置16被车身15可旋转地支撑。支撑装置16构成车身15的一部分。支撑装置16包括:导轨21,其横向延伸并设置在构成车辆2的车舱17的前壁的仪表板18上;滑动器22,其由导轨21支撑;臂23,其从滑动器22向后延伸;以及底座24,其设置在臂23后端。滑动器22由导轨21支撑,使得滑动器22可以沿导轨21横向移动。臂23包括至少一个接头25,并支撑底座24,使得底座24可以相对于滑动器22在前后方向和上下方向上移动。臂23可以包括例如多个平行连杆机构。
[0045]
如图2和图3中所示,转向操作元件10包括:毂部31,其相对于臂23的底座24可旋转地设置;延伸部32,其从毂部31的外周径向向外延伸;外边缘部33,其设置在延伸部32的外
边缘上。延伸部32构成与毂部31同轴设置的圆盘部。在本实施方式中,延伸部32从毂部31向在转向操作元件10(毂部31)的转动轴线a的方向上与底座24相对的那一侧径向向外延伸,并形成圆锥形状,毂部31位于该锥形形状的顶部。如冲压金属板那样,延伸部32可以具有多个通孔。优选地,延伸部32由树脂材料或金属材料制成。
[0046]
外边缘部33沿延伸部32的外边缘延伸。在本实施方式中,外边缘部33绕转向操作元件10(毂部31)的转动轴线a形成环形形状,并构成环形部。外边缘部33具有圆形截面。外边缘部33在截面中的直径大于延伸部32的厚度。外边缘部33起抓握部的作用,乘员抓握该抓握部以对转向操作元件10进行转动操作。外边缘部33的表面可以由诸如橡胶之类的柔性材料制成。
[0047]
如图1中所示,转向操作元件10包括第一电容传感器35、第二电容传感器36、第三电容传感器37、转向角传感器38和力传感器39。转向角传感器38配置成检测转向操作元件10相对于车身15的转向角。转向角传感器38可以由旋转编码器、旋转变压器等构成。在另一实施方式中,转向操作元件10可以包括配置成检测转向操作元件10的转向速度的陀螺仪传感器。力传感器39可以是已知的压电传感器或已知的应变仪传感器,并且设置在底座24和毂部31之间。
[0048]
如图2、图4和图5中所示,第一电容传感器35至第三电容传感器37是触摸传感器,配置成基于电容的变化来检测诸如乘员的手指之类的物体的接近和接触。第一电容传感器35至第三电容传感器37设置在转向操作元件10的外边缘部33上。
[0049]
外边缘部33包括面对乘员侧的正面部33a和与正面部33a相对的背面部33b。更具体地,在外边缘部33在包括外边缘部33的外周边缘(外边缘部33在转向操作元件10的转动轴线a周围具有最大直径的部分)和内周边缘(外边缘部33在转向操作元件10的转动轴线a周围具有最小直径的部分)的一个平面上分成两部分的情况下,布置在底座24侧的一个部分被定义为背面部33b,而布置在底座24的相反侧的另一部分被定义为正面部33a。第一电容传感器35设置在外边缘部33的正面部33a和背面部33b中的一者上。第二电容传感器36设置在外边缘部33的正面部33a和背面部33b中的另一者上。在本实施方式中,第一电容传感器35设置在正面部33a上,而第二电容传感器36设置在背面部33b上。
[0050]
第一电容传感器35是形成环形形状的单个传感器,并且沿外边缘部33的正面部33a与外边缘部33同轴设置。在另一个实施方式中,多个第一电容传感器35可以沿外边缘部33的正面部33a在周向上布置。优选地,第一电容传感器35设置在正面部33a的内周侧。更具体地,当沿转向操作元件10的转动轴线a的方向观察时,优选地,第一电容传感器35相对于穿过外边缘部33的宽度方向中心部的中心圆设置在径向内侧。即,优选地,第一电容传感器35设置在外边缘部33的内周部33d上。
[0051]
第二电容传感器36是形成为环形形状的单个传感器,并且沿外边缘部33的背面部33b与外边缘部33同轴地设置。在另一个实施方式中,多个第二电容传感器36可以沿外边缘部33的背面部33b在周向上布置。优选地,第二电容传感器36沿背面部33b的宽度方向中心部延伸。优选地,第二电容传感器36具有比第一电容传感器35大的直径。
[0052]
第三电容传感器37沿包括外边缘部33的外周边缘的外周部33c在周向上布置。第三电容传感器37在周向上均具有相同的角长度,并且以相等的间隔彼此相邻布置。优选地,相邻的第三电容传感器37之间的间隙尽可能小。在本实施方式中,设置有三十六个第三电
容传感器37,其各自具有约10度的角长度。
[0053]
第一电容传感器35至第三电容传感器37配置成输出对应于其电容的信号。物体越接近相应的传感器35至37、接近物体的尺寸越大,接近物体的相对介电常数越高,第一电容传感器35至第三电容传感器37的电容越大。
[0054]
如图3中所示,延伸部32和外边缘部33中的至少一者上设置有至少一个光源27。在本实施方式中,光源27包括设置在延伸部32上的至少一个第一光源27a和设置在外边缘部33上的至少一个第二光源27b。至少一个第一光源27a和至少一个第二光源27b可以由例如led构成。多个第一光源27a可以均匀地分散在延伸部32的正面部32a中,绕毂部31径向布置,或绕毂部31布置在多个同心圆上。第一光源27a可以使延伸部32的每个部分独立发光。多个第二光源27b可以沿外边缘部33的正面部33a沿周向布置。另选地,一个第二光源27b可以沿外边缘部33的正面部33a在周向上设置为环形形状。第二光源27b可以使外边缘部33的每个周向部分独立发光。
[0055]
如图2中所示,毂部31的正面部31a侧(乘员侧)设置有显示器40。显示器40由例如液晶显示器或有机el显示器构成,并能显示彩色图像。显示器40形成为圆形,并占据毂部31的正面部31a的50%或更多的面积。
[0056]
行驶控制装置11与配置成检测车辆2的各种状态量的车辆传感器45以及配置成检测车辆2周围的环境信息的外部环境识别装置46连接。车辆传感器45包括例如:配置成检测车辆2的车辆速度的车辆速度传感器;配置成检测车辆2的加速度的加速度传感器;配置成检测车辆2的偏航率的偏航率传感器;以及配置成检测门的开闭状态的门开闭传感器。行驶控制装置11配置成从车辆传感器45获取车辆2的各种状态量。
[0057]
外部环境识别装置46配置成获取周围车辆信息和周围环境信息,从而将周围车辆信息和周围环境信息输出到行驶控制装置11。外部环境识别装置46包括:配置成捕获本车辆2周围的图像的摄像头47;配置成检测本车辆2周围存在的物体的诸如激光或激光雷达之类的物体检测传感器48;以及导航装置49。外部环境识别装置46配置成基于由摄像头47捕获的图像获取道路和车道上的车道标记,并基于由摄像头47捕获的图像和物体检测传感器48的检测信号获取周围车辆信息,该周围车辆信息包括关于在本车辆2周围行驶的周围车辆的位置和速度的信息。另外,外部环境识别装置46配置成基于本车辆2的位置和来自导航装置49的地图信息获取周围环境信息,该周围环境信息包括关于车辆正在行驶的一条车道、与该一条车道相邻的另一车道以及车辆2周围的岔路的信息。
[0058]
在第一操作控制中,行驶控制装置11基于来自转向角传感器38的信号控制转向装置4,并且根据对转向操作元件10的推拉操作和对第一电容传感器35至第三电容传感器37的触摸操作控制驱动装置5和制动装置6。行驶控制装置11基于例如来自力传感器39的信号检测转向操作元件10的移动。由行驶控制装置11检测到的转向操作元件10的移动包括沿转动轴线a朝推动侧(远离乘员的那一侧)和朝拉动侧(靠近乘员的那一侧)的移动。当转向操作元件10朝拉动侧操作时,行驶控制装置11可以控制驱动装置5和制动装置6以使车辆2减速。当转向操作元件10朝推动侧操作时,行驶控制装置11可以控制驱动装置5以使车辆2加速。因此,乘员可以通过转动转向操作元件10来操纵车辆2,通过对转向操作元件10进行推动操作来使车辆2加速,并通过对转向操作元件10进行拉动操作来使车辆2减速。另外,在第一操作控制中,行驶控制装置11可以基于来自转向角传感器38的信号控制转向装置4,基于
来自加速踏板52的信号控制驱动装置5,并且基于来自制动踏板53的信号控制驱动装置5和制动装置6。此外,加速踏板52和制动踏板53可以整合为一个构件,并且当按压以上构件时,可以输出对应于加速的信号,当释放以上构件的按压时,可以输出对应于减速的信号。
[0059]
行驶控制装置11执行第一操作模式以根据来自检测转向操作元件10的转向角的转向角传感器38的信号控制转向装置4,并且执行第二操作模式以根据来自第一电容传感器35至第三电容传感器37中的至少一者的信号控制转向装置4。行驶控制装置11可以根据车辆2的驾驶模式在第一操作模式和第二操作模式之间改变操作模式。行驶控制装置11可以在手动驾驶模式期间执行第一操作模式,并且在自主驾驶模式期间执行第二操作模式。
[0060]
在第一操作模式中,行驶控制装置11根据乘员对转向操作元件10的转动操作来控制转向装置4,并且改变车轮的转向角。在第二操作模式中,行驶控制装置11根据乘员对第一电容传感器35至第三电容传感器37的触摸操作来控制转向装置4和驱动装置5中的至少一者。
[0061]
第一电容传感器35和第二电容传感器36向行驶控制装置11输出对应于电容的信号。行驶控制装置11根据从第一电容传感器35和第二电容传感器36输出的信号控制驱动装置5和制动装置6中的至少一者。例如,在对应于自主驾驶模式的第二操作模式中,行驶控制装置11可以根据从第一电容传感器35和第二电容传感器36输出的信号控制驱动装置5和制动装置6中的至少一者。在本实施方式中,行驶控制装置11在接收到来自第一电容传感器35的规定信号时执行加速控制。在加速控制中,行驶控制装置11控制驱动装置5来使车辆2加速。行驶控制装置11在接收到来自第二电容传感器36的规定信号时执行减速控制。在减速控制中,行驶控制装置11控制驱动装置5和制动装置6中的至少一者,以使车辆2减速。加速控制包括:将目标车辆速度从当前值增加规定值的控制;以及将目标车辆间距离(本车辆2和在本车辆2前面行驶的前行车辆之间的距离)从当前值缩短规定值的控制。减速控制包括:将目标车辆速度从当前值减少规定值的控制;以及将目标车辆间距离从当前值加长规定值的控制。
[0062]
在乘员对第一电容传感器35进行规定操作的情况下,第一电容传感器35向行驶控制装置11输出规定信号。乘员对第一电容传感器35进行的规定操作可以是产生规定电容变化的操作,例如单击操作、双击操作或长按操作。在本实施方式中,行驶控制装置11在检测到与乘员对第一电容传感器35的单击操作对应的第一电容传感器35的电容变化时执行加速控制。
[0063]
在乘员对第二电容传感器36进行规定操作的情况下,第二电容传感器36向行驶控制装置11输出规定信号。乘员对第二电容传感器36进行的规定操作可以是产生规定电容变化的操作,例如单击操作、双击操作或长按操作。在本实施方式中,行驶控制装置11在检测到与乘员对第二电容传感器36的单击操作对应的第二电容传感器36的电容变化时执行减速控制。
[0064]
另外,当车辆2停止时,行驶控制装置11可以根据从第一电容传感器35至第三电容传感器37中的至少一者接收到的信号执行行驶启动控制。在行驶启动控制中,行驶控制装置11控制驱动装置5以启动车辆2的行驶。此外,当车辆2正在行驶时,行驶控制装置11可以根据从第一电容传感器35至第三电容传感器37中的至少一者接收到的信号执行停止控制。在停止控制中,行驶控制装置11控制驱动装置5和制动装置6中的至少一者以停止车辆2的
行驶。行驶控制装置11可以通过使用车辆传感器45来获取车辆速度,并且当车辆速度为0或当车辆速度等于或小于规定值时,可以确定车辆2停止。例如,当车辆速度等于或小于规定值,并且布置在特定周向区域中的第三电容传感器37检测到与单击操作对应的电容变化时,行驶控制装置11可以执行行驶启动控制,从而控制驱动装置5以启动车辆2的行驶。此外,例如,当车辆速度大于规定值,并且布置在特定周向区域中的第三电容传感器37检测到与单击操作对应的电容变化时,行驶控制装置11可以执行停止控制,从而停止车辆2。
[0065]
另外,行驶控制装置11基于来自第三电容传感器37的信号,检测包括与外边缘部33接触的乘员的手在内的物体的移动方向(沿外边缘部33的周向的顺时针方向或与顺时针方向相反的逆时针方向)。行驶控制装置11基于物体的移动方向执行转向控制以控制转向装置4。当物体在外边缘部33的外周部33c上沿周向移动时,沿周向布置的第三电容传感器37的电容依次增加,然后减少。因此,行驶控制装置11可以通过检测第三电容传感器37的电容的变化来检测物体相对于外边缘部33的周向移动。因此,通过使用第三电容传感器37,行驶控制装置11可以检测乘员对外边缘部33的外周部33c的划动操作。第三电容传感器37的电容的变化顺序根据外边缘部33上的顺时针划动操作或逆时针划动操作而变更。因此,行驶控制装置11可以区分和识别乘员的顺时针划动操作和逆时针划动操作。此外,行驶控制装置11可以基于来自第三电容传感器37的信号来辨识外边缘部33的被乘员进行划动操作的部分(区域)。当乘员对外边缘部33的特定部分进行划动操作时,行驶控制装置11可以执行转向控制。
[0066]
如图1中所示,显示器40、第一光源27a和第二光源27b由界面控制装置41控制。界面控制装置41使显示器40显示与表示车辆2的状态的车辆状态信息和表示车辆2的周围环境的环境信息中的至少一者相对应的图像。界面控制装置41使第一光源27a和第二光源27b根据由第一电容传感器35至第三电容传感器37检测到的乘员输入的操作而发光。车辆状态信息包括车辆2的驾驶模式(自主驾驶模式或手动驾驶模式)、车辆2的行驶方向或预期轨迹、车辆2的车辆速度以及车辆2的转向角中的至少一者。环境信息至少包括车辆2和存在于车辆2周围的周围车辆之间的相对位置关系,并且可以包括周围车辆的速度、车辆2和周围车辆的相对速度。界面控制装置41从行驶控制装置11、稍后将描述的外部环境识别装置46和车辆传感器45获取车辆状态信息和环境信息。界面控制装置41可以直接从外部环境识别装置46和车辆传感器45获取信息,或者可以经由行驶控制装置11从外部环境识别装置46和车辆传感器45获取信息。此外,界面控制装置41配置成基于来自第一电容传感器35至第三电容传感器37和行驶控制装置11的信号来控制第一光源27a和第二光源27b的发光模式。来自第一电容传感器35至第三电容传感器37的信号可以直接输入到界面控制装置41,或者可以经由行驶控制装置11输入到界面控制装置41。
[0067]
接下来,将描述界面控制装置41使显示器40显示的图像。如图6的(a)至图(d)中所示,显示在显示器40上的图像根据车辆状态(例如,门打开状态、停止状态(待机状态)、自主驾驶状态和手动驾驶状态)而变化。
[0068]
界面控制装置41经由行驶控制装置11从包括在车辆传感器45中的门打开/关闭传感器获取信号,并且在确定车辆2的门打开时使显示器40显示图6的(a)中所示的门打开时图像70。门打开时图像70可以是任何预设的图像。根据本实施方式的门打开时图像70包括黑色背景和布置在显示器40中心的白色徽记71。
[0069]
界面控制装置41经由行驶控制装置11获取来自包括在车辆传感器45中的车辆速度传感器的信号、与驻车制动装置的操作状态相关的信号以及与车辆2的电源通/断状态相关的信号,并且在基于这些信号确定车辆2的电源处于接通状态并且车辆2处于停止状态时,使显示器40显示图6的(b)中所示的停止时图像80。停止时图像80包括:本车辆图像81,其在显示器40的中央显示本车辆2;以及行驶方向图像82(第二图像),其显示在显示器40的上边缘附近并在本车辆图像81上方,并且与车辆2的行驶方向相对应。本车辆图像81是抽象地显示本车辆2的图像,并被绘制成灰色圆。停止时图像80的本车辆图像81具有恒定的形状,以使乘员识别到本车辆2停止,并以给予惰性印象的颜色(例如灰色)示出。停止时图像80的行驶方向图像82由圆点构成。由于本车辆2没有行驶,因此停止时图像80的行驶方向图像82显示在中性位置,即横向方向上的中央位置。
[0070]
界面控制装置41从行驶控制装置11获取驾驶模式,并在确定驾驶模式为自主驾驶模式时使显示器40显示图6的(c)中所示的自主驾驶时图像90。自主驾驶时图像90包括:本车辆图像91,其在显示器40的中央显示本车辆2;行驶方向图像92(第二图像),其显示在显示器40的上边缘附近并在本车辆图像91上方,并且与车辆2的行驶方向相对应;以及一个或多个障碍物图像93,其对应于本车辆2周围存在的一个或多个障碍物。障碍物包括存在于本车辆周围的周围车辆、人、坠落物等。本车辆图像91和每个障碍物图像93形成相对位置图像94(第一图像),该相对位置图像表示车辆2和存在于车辆2周围的周围车辆之间的相对位置关系。相对位置图像94是示出车辆2周围区域的平面图。
[0071]
自主驾驶时图像90的本车辆图像91被绘制成大致圆形的形状。本车辆图像91的周向边缘可以像液体流动一样摇摆,以使乘员识别到车辆2正在行驶。此外,可以以与停止时图像80的本车辆图像81的颜色不同的颜色示出本车辆图像91,以使乘员识别到车辆2正在行驶,并且该本车辆图像91可以示为给予积极印象的颜色(例如,蓝色)。本车辆图像91可以根据加速而向下移动,根据减速而向上移动,根据右转弯而向左移动,并根据左转弯而向右移动。乘员可以基于本车辆图像91的移动来识别车辆2的加速/减速状态和转弯状态。
[0072]
自主驾驶时图像90的行驶方向图像92是圆点。界面控制装置41根据从行驶控制装置11获取的车辆2的预期轨迹,围绕显示器40沿周向横向移动行驶方向图像92。例如,在车辆2的预期轨迹向右转弯的情况下,行驶方向图像92可以移动到布置在显示器40中心上方的中性位置的右侧。行驶方向图像92的横向移动量可以对应于车辆2的预期轨迹的转弯量。
[0073]
自主驾驶时图像90的每个障碍物图像93均包括圆点和围绕该点的圆。界面控制装置41经由行驶控制装置11获取外部环境识别装置46获取的周围车辆信息,并绕本车辆图像91显示与各周围车辆对应的障碍物图像93。
[0074]
界面控制装置41从行驶控制装置11获取驾驶模式,并在确定驾驶模式为手动驾驶模式时使显示器40显示图6的(d)中所示的手动驾驶时图像100。手动驾驶时图像100包括:本车辆图像101,其在显示器40的中央显示本车辆2;行驶方向图像102(第二图像),其显示在显示器40的上边缘附近并在本车辆图像101上方,并且与车辆2的行驶方向相对应;以及一个或多个障碍物图像103,其对应于本车辆2周围存在的一个或多个障碍物。本车辆图像101和每个障碍物图像103形成相对位置图像104(第一图像),该相对位置图像表示车辆2和存在于车辆2周围的周围车辆之间的相对位置关系。
[0075]
手动驾驶时图像100的本车辆图像101被绘制成大致圆形形状。本车辆图像101的
周向边缘可以像液体流动一样摇摆,以使乘员识别到车辆2正在行驶。优选地,手动驾驶时图像100的本车辆图像101的周向边缘的摇摆(变化)大于自主驾驶时图像90的本车辆图像91的周向边缘的摇摆(变化)。此外,手动驾驶时图像100的本车辆图像101大于自主驾驶时图像90的本车辆图像91。即,界面控制装置41使本车辆2周围的区域在自主驾驶模式的情况下比在手动驾驶模式的情况下宽。
[0076]
界面控制装置41可以根据车辆2是否在加速或减速来改变本车辆图像101的颜色。即,在手动驾驶模式的情况下,界面控制装置41基于车辆状态信息确定车辆2的加速/减速状态,并且根据加速/减速状态改变对应于车辆2的本车辆图像101。例如,当车辆2正在加速时,本车辆图像101可以着色成蓝色,并且当车辆2正在减速时,可以着色成红色。本车辆图像101可以根据加速而向下移动,根据减速而向上移动,根据右转弯而向左移动并且根据左转弯而向右移动。界面控制装置41可以基于由车辆传感器45获取的车辆速度、加速度或减速度或者来自加速踏板52或制动踏板53的信号来确定车辆2的加速/减速状态。
[0077]
界面控制装置41在本车辆图像101中显示多个物体图像105,使得物体图像105的移动速度根据车辆速度而变化。在本实施方式中,每个物体图像105均具有大致圆形的形状,使乘员想到气泡,并从本车辆图像101的中央径向移动。此时,物体图像105的直径随着物体图像105的移动而增大。因此,对于乘员来说,物体图像105看起来就像从显示器40的背面来到前面一样。物体图像105在移动时可以水平和竖直地摆动。此外,界面控制装置41可以随着车辆速度的提高而增加物体图像105的数量并提高其移动速度。界面控制装置41可以经由行驶控制装置11获取由包括在车辆传感器45中的车辆速度传感器检测到的车辆速度。
[0078]
手动驾驶时图像100的行驶方向图像102是圆点。界面控制装置41基于来自转向角传感器38的信号从行驶控制装置11获取转向操作元件10的转向角,并且根据转向操作元件10的转向角围绕显示器40沿周向横向移动行驶方向图像102。
[0079]
手动驾驶时图像100的障碍物图像103与自主驾驶时图像90的障碍物图像93相同。本车辆图像101和每个障碍物图像103形成相对位置图像104,该相对位置图像表示车辆2和存在于车辆2周围的周围车辆之间的相对位置关系。在另一个实施方式中,手动驾驶时图像100中可以不示出障碍物图像103。
[0080]
如上所述,界面控制装置41根据诸如门打开状态、停止状态、自主驾驶状态和手动驾驶状态之类的车辆状态改变显示在显示器40上的图像。界面控制装置41根据包括在车辆状态信息中并包括关于自主驾驶模式和手动驾驶模式的信息的驾驶模式信息来改变包括本车辆图像91、101和障碍物图像93、103的相对位置图像94、104。
[0081]
界面控制装置41配置成基于来自第一电容传感器35至第三电容传感器37的信号控制第一光源27a和第二光源27b。如图7的(a)中所示,界面控制装置41基于来自第一电容传感器35至第三电容传感器37的信号,辨识外边缘部33的被乘员进行触摸操作的区域,并使外边缘部33的被进行了触摸操作的区域中的第二光源27b发光。乘员的触摸操作可以是例如单击操作、双击操作或长按操作。界面控制装置41可以基于来自第三电容传感器37的信号辨识进行了触摸操作的区域。如图7的(b)中所示,在乘员的触摸操作是在外边缘部33上的划动操作的情况下,界面控制装置41可以基于来自第三电容传感器37的信号,使与进行了划动操作的区域对应的第二光源27b沿乘员的手的移动方向依次发光。
[0082]
另外,如图7的(a)中所示,界面控制装置41基于来自第一电容传感器35至第三电容传感器37的信号,在检测到乘员对外边缘部33的触摸操作时,使多个第一光源27a发光。此时,界面控制装置41至少使布置在延伸部32的内周部中的一个或多个第一光源27a发光。此外,如图7的(b)中所示,界面控制装置41可以在检测到乘员对外边缘部33的划动操作时使一个或多个第一光源27a发光。一个或多个第一光源布置在延伸部32的内周部中,并对应于在径向方向上进行了划动操作的区域。通过使第一光源27a根据乘员对外边缘部33的触摸操作而发光,乘员可以理解其触摸操作已经传递到车辆2。
[0083]
当自主驾驶模式切换到手动驾驶模式时,行驶控制装置11生成驾驶干预请求(移交请求)。例如,驾驶干预请求可以借助来自扬声器的语音或警告声或通过显示器40上的指示通知乘员。作为对驾驶干预请求的响应,要求驾驶员通过用双手抓握转向操作元件10的外边缘部33来表达其接受意向。如图7的(c)中所示,界面控制装置41基于从行驶控制装置11获取的驾驶干预请求,确定是否生成驾驶干预请求。当生成驾驶干预请求时,界面控制装置41在基于来自第一电容传感器35至第三电容传感器37的信号检测到乘员用双手抓握外边缘部33时,使外边缘部33的所有第二光源27b发光,并使第一光源27a发光。此时,所有的第一光源27a可以发光,或者第一光源27a的布置在延伸部32的内周部的那一部分可以发光。当对应于手掌宽度的左和右第三电容传感器37的电容增加时,界面控制装置41可以确定乘员已经对外边缘部33进行了抓握操作。当检测到抓握操作时,所有第二光源27b环形地发光,这使得乘员能够理解其对驾驶干预请求的接受响应已经传递到车辆2。
[0084]
在界面控制装置41基于从行驶控制装置11获取的驾驶干预请求确定没有生成驾驶干预请求的情况下,界面控制装置41在基于来自第一电容传感器35至第三电容传感器37的信号检测到乘员用双手抓握外边缘部33时,使对应于该外边缘部33的被乘员抓握的区域的第二光源27b发光,并使第一光源27a发光。这样,界面控制装置41依据驾驶干预请求的存在或不存在,根据乘员对外边缘部33的抓握操作,变更第二光源27b的发光模式。
[0085]
根据以上实施方式的转向操作元件10可以防止来自第一光源27a和第二光源27b的光使乘员感到厌烦,因为在乘员对触摸传感器的操作输入不存在的情况下,第一光源27a和第二光源27b不发光。此外,设置在毂部31中的显示器40显示与车辆状态信息相对应的图像,从而可以将信息适当地传递给乘员。
[0086]
在自主驾驶时和手动驾驶时,显示器40显示表示本车辆2和周围车辆之间的相对位置关系的相对位置图像94、104。因此,乘员可以通过检查显示器40来识别周围车辆的存在和位置。另外,自主驾驶时表示本车辆2的本车辆图像91与手动驾驶时表示本车辆2的本车辆图像101不同,使得乘员可以基于本车辆图像91、101识别当前驾驶模式。另外,乘员可以基于本车辆图像101的颜色来识别车辆2的加速/减速状态。此外,乘员可以基于显示在本车辆图像101上的物体图像105来识别车辆2的速度。此外,乘员可以基于显示在显示器40上的行驶方向图像92、102识别本车辆2的行驶方向。
[0087]
第一光源27a和第二光源27b根据乘员的操作发光,从而乘员可以识别其操作已传递到车辆2。
[0088]
上述内容中已经描述了本发明的具体实施方式,但本发明不应受到上述实施方式的限制,并且在本发明的范围内可以进行各种变型和修改。例如,显示器40上显示的每个图像均是示例,并且其形状、移动、颜色、尺寸和位置可以适当地改变。
[0089]
术语表
[0090]
1:车辆控制系统
[0091]
2:车辆
[0092]
10:转向操作元件
[0093]
11:行驶控制装置
[0094]
27:光源
[0095]
27a:第一光源
[0096]
27b:第二光源
[0097]
31:毂部
[0098]
31a:正面部
[0099]
32:延伸部
[0100]
35:第一电容传感器
[0101]
36:第二电容传感器
[0102]
37:第三电容传感器
[0103]
38:旋转角传感器
[0104]
40:显示器
[0105]
41:界面控制装置
[0106]
45:车辆传感器
[0107]
46:外部环境识别装置
[0108]
70:门打开时图像
[0109]
80:停止时图像
[0110]
81、91、101:本车辆图像
[0111]
82、92、102:行驶方向图像
[0112]
90:自主驾驶时图像
[0113]
93、103:障碍物图像
[0114]
94、104:相对位置图像
[0115]
100:手动驾驶时图像
[0116]
105:物体图像
[0117]
a:转动轴线
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1