脚控个人运输器的制作方法
脚控个人运输器
1.交叉引用的相关专利申请
2.本专利申请要求上述发明人于2018年7月28日提交的临时申请第62/711,527号,题为"脚控个人运输器"的优先权。
技术领域
3.本发明涉及个人运输器,更具体地说,涉及平台下驱动轮和/或单脚平台的此类运输器,以及此类运输器的扩展用途。
背景技术:
4.目前技术包括美国专利号 8,738,278 颁发给 shane chen(本文中的发明人)的两轮自平衡车,具有独立可移动脚放置部分。本专利特此通过参考纳入,仿佛全文在此披露。'278 专利说明了两个可移动脚平台的前后自平衡,以及驱动电机、控制电路和相关组件。
5.在'278专利中,脚平台彼此耦合,虽然前后独立旋转,但它们保持固定的平行关系。没有横向或纵向相对独立的运动。
6.由本发明者的美国专利申请号 15/916,985,说明了其自动平衡车允许这种横向和/或纵向彼此运动。这些装置可以单独容纳每只脚,因此可以作为"单脚"装置。这些装置还具有低或更小的轮廓,包括将驱动轮放在脚平台下,从而使上车下车不会(或很少)有难度。
7.具有独立单脚平台的自动平衡装置,尤其是脚平台下驱动轮,具有多种优点。其中包括容纳不同大小和优选脚间距的骑手,以及通过允许骑手自由的前后或侧向移动他们的腿和脚来增强骑行体验。独立的脚运动还允许骑手躲绕障碍物和在狭窄的路径上行走,并且障碍物可已是一系列的(一个又一个),而不是像通常稳定的双脚平行(同时的)行走。
8.与本发明人发明的扭扭车和更大的赛格威车相比,两个独立的小型运输器的另一个好处是本发明的单脚平台运输器体积相对较小且重量轻。这使得他们很容易携带或存放,例如,在工作,在公共汽车上,或在家里。在使低调的单脚运输器成为可行的通勤选择时,后一种好处可能尤为重要。
9.'985 专利申请描述了具有圆柱形车轮结构的实施例,其整个宽度的车轮接触地面。虽然'985所描述的两个运输器作为一起用时圆柱形运输器轮不影响转向,但单个这样的运输器单独使用将很难转向。虽然圆柱形车轮提供横向稳定性,但如把车轮做成从一侧到另一侧具有凸出的曲面时,可使车轮自然地转向到其倾斜的一侧,可以扩大该运输器的潜在用途范围。
10.'985 专利申请描述了脚平台前后方向对称的实施方案,以便骑手可以没有区别的站在任一方向上。虽然这对于方便踩到朝向任一方向的运输器很有用,但一些骑手可能觉得站在距离车轮向前延申比向后延申更多的平台上更舒适,以匹配人脚相对于脚踝关节的比例。
11.自动平衡个人运输器的日益普及,部分原因在于其操作简单性和易用性。由于移动体重以启动加速是人类行走和跑步机制的一部分,许多用户发现操作自动平衡车辆感觉自然和直观。同时,电动滑板和滑板车的运行方法在现有技术中往往缺乏自动平衡车的方便性和直观性。自动平衡单轴滑板虽然存在,但与传统的动力滑板是一种根本不同的车辆类型。需要一种个人运输器但本身不是自动平衡,而是具有自动平衡驱动方法的一些优点。
技术实现要素:
12.因此,提供具有倾斜转向功能的单脚控制的脚控个人运输器是本发明的对象。
13.提供具有定向脚平台的单脚控制个人运输器也是本发明的对象。
14.将自动平衡驱动方法应用于已熟悉的个人车辆(如滑板和滑板车)是本发明的另一个目的,而不是车辆本身自动平衡。
15.在回顾了以下与图纸一起对本发明的更详细的描述后,本发明的实现和相关优势和特征应更容易为本领域技术人员所了解。
附图说明
16.图1-2根据本发明显示一对单脚平台自动平衡运输器的透视视图。
17.图 3-4 显示了图 1-2 及平台被掀起来的运输器透视视图。
18.图5-6显示了根据本发明脚控个人运输器的另一个实施例的透视视图。
19.图7-9根据本发明显示脚控个人运输器的透视、正面和侧面视图。
20.图10显示了本发明的一个实施例的透视视图,该实施例配有脚支撑附件。
21.图11显示了本发明运输器驱动的电动滑板的体现的透视图。
22.图12显示了本发明运输器驱动的电动滑板实施例的另一个视图的透视视图。
23.图13显示了本发明运输器驱动的滑板车的体现的透视图。
24.图14显示了本发明运输器的两个单元驱动的滑板车的另一个实施例的透视图。
具体实施方式
25.参考图1-2,根据本发明,显示了一对单脚平台自动平衡运输器10,50的透视视图。运输器 10,50 基本相同,可互换使用(左脚或右脚,向前或向后)。也就是说,本发明内配对的单脚平台运输器可专门配置用于左右脚,类似于鞋子,而与本发明不偏离。
26.运输器10优选有轮20,外壳30和平台40。运输器轮 20 最好由轮毂电机 22 驱动(如图 2 所示)。电机 22 可能有一对安装杆 24,耦合到支架 32,支架32固定耦合到外壳 30。这样,电机和车轮牢固地耦合到外壳上。安装杆 24 最好与车轮 20 的旋转轴同轴排列。因此,本实施例中,电机和车轮的旋转轴是相同的。车轮 20 还可能包括轮胎或其他外部处置的牵引力增强和/或减震材料 21。
27.脚平台 40 可用紧固件 41 固定到外壳 30。最好提供防水密封,以保护平台和外壳外壳内部的组件。防滑面(橡胶或其他)、砂纸(用于滑板)或其他摩擦增加材料42可应用于平台40的顶部表面。
28.运输器 50 还优选包括车轮 60、外壳 70 和平台 80。车轮 60 可包括轮胎 61 或类似,最好由安装类似的轮毂电机驱动。这些组件和相关组件可以配置为运输器 10 中
的对应组件。图1说明侧壁86可能从平台80上升。侧壁可以协助运输器控制,允许骑手20用脚对它们施加压力。侧壁以虚线表示,因为它们是可选的。虽然只显示在一台运输器上,但可提供在任何运输器。此外,它们可能具有不同的形状,而不会偏离本发明。但是,低侧壁可减少上下车的难度。
29.运输器 10 最好包括位置传感器 34、控制电路 36、电池 38(如图 3 所示)和驱动电机 22。位置传感器 34 最好是陀螺仪传感器。它能够感应前后俯仰,并可能感应侧向倾斜,以及其他措施。为了响应向前的俯仰角,运输器向前驱动,为响应向后的俯仰角,它反向驱动。速度基于俯仰角的大小。自动平衡部件和技术在领域中是众所周知的。
30.运输器 50 类似包括位置传感器 74、控制电路 76、电池 78 和驱动电机(从视图上模糊,但由驱动电机 22 表示)。运输器 50 的运行方式与运输器 10 类似。
31.因此,运输器 10,50 实际上是独立的自动平衡运输器。在图1-2的实施例中,平台可以宽3-4英寸(横向)和6-8英寸长(纵向),或其他。
32.参考图3和图4,显示了平台40被掀开了的运输器10的透视视图。由于平台 40 纵向延伸,外壳 30 在车轮 20 和平台边缘之间延伸,因此形成了两个体积或空腔 91,92(图 4),每个体积或空腔位于车轮的相反纵向两侧。根据壳体和车轮的形状,车轮 20 的侧侧也可能存在薄体积。
33.电池 38 最好放在体积 91,92 的其中一个或两个。电路板 35 可放置在车轮 20 的侧侧薄腔中(图 3)。位置传感器 34 和控制电路 36 最好放置在此电路板上。这样,运输器 10 的组件可以有效地排列在又小又可用的体积中。
34.虽然两体积91,92是由单个外壳形成的,但应当认识到,部件和外壳可以以其他方式排列,而不用偏离本发明。例如,两个单独的外壳部分可能从平台的底面下伸。此外,随着电池尺寸的减少,电池技术的进步,组件和形状10的外壳30可以以其他方式安排。关于外壳30,外壳的形状可以以其他方式排列,而不管电池尺寸的减小,而不偏离本发明。例如,外壳可以更锥形或凹槽,或圆圆纵向,或以其他方式功能或艺术渲染。
35.运输器 50 最好以与运输器 10 相同的方式在内部排列。
36.车轮 20,60 优选横向居中(或实质上如此),以增强横向平衡,并且通常宽,以提高横向稳定性。图2说明了x的车轮宽度和y的平台宽度。优选x是y的50-100%,虽然它可能小于50%或超过100%(具有延长安装的支架或分轮结构等),而不偏离本发明。更优选的,x 可能是 y 的 60-95% 或 y 的 70-90%。
37.参考图5-6,显示了根据本发的脚控个人运输器110,为另一个实施例的透视视图。
38.与运输器 10 类似,运输器 110 包括车轮 120a、120b、外壳 130 和平台 140。运输器110还优选包括传感器、控制电路和电池,如上所述。图 5 说明了带有平台的运输器 110 和删除平台时的运输器 6。
39.与运输器 10 的单轮相比,运输器 110 包括两个车轮 120a,120b。这些车轮最好在外壳部分127 内由一根轴或类似的东西耦合在一起,这样,如果一个车轮转动,另一个车轮也转动。轮毂电机最好提供在车轮 120a里,因此,当车轮 120a 驱动时,车轮 120b 也被驱动。也可以使用非轮毂电机(或经过改装的轮毂电机),并且可以放置在车轮之间。此电机可以在轴以上或其他。
40.此处使用的术语"单轮结构"是指单轮(如图 1 的车轮 20),与同速转动的成对或
多个耦合车轮是相同的,例如耦合车轮 120a,120b(相当于一个单个宽轮)。
41.图 5 的耦合车轮提供了从一个车轮的外边缘到另一个车轮的外缘的整体车轮宽度 x。宽 x 提供增强的横向稳定性。
42.运输器 110 的尺寸可能大于运输器 10 的尺寸。如所示,在运输器 110 中,运输器的宽度可能大于长。这将允许骑手的两只脚都站在平台140上,可朝前。平台140也可以在箭头 a 的方向上纵向扩展。在此维度中扩展平台将允许骑手舒适地、侧身地站立,双脚站在平台 140 上,或站在纵向和侧向之间。因此,可以将本发明配置为单脚或双脚骑行。此外,例如,如果平台 140 向 a 扩展,悬伸出于外壳 130,则平台中很容易形成手柄(在悬伸部分加开口形成),使运输器易于被拾起、携带和放下。
43.虽然车轮 120a,120b 被如上所述为单个车轮结构的一部分,由单个电机驱动,但应认识到这些车轮可以由单独的电机以不同的速度驱动。例如,它们可以同轴排列,但没有公共轴,除了运输器内的位置传感器外,还可向平台 140 提供压力传感器。位置传感器可以检测前后俯仰进行一般驾驶,压力传感器可以通过检测横向重量变化(基于重量分布)来调整每个车轮的速度以影响转弯。
44.图7-9显示了根据本发明运输器210的另一个实施例。与运输器 10 类似,此运输器包括车轮 220、外壳 230 和平台 240。运输器210还优选包括传感器、控制电路和电池,如上例所述。车轮 220 的接地接触表面可能从一侧到一侧凸弯,最大圆周位于中心,因此当车轮 220 垂直站立时,其左右边缘不会接触地面。当运输器 210 向一侧倾斜时,与地接触的车轮 220 部分向倾斜侧移动,车轮 220 的接地接触区域中的差分周长导致运输器 210 转向倾斜方向。因此,曲面的车轮可增强转弯,从而方便骑手控制转向,并在行驶过程中实现平衡。车轮与地面接触的面积较小,也会降低转向的摩擦阻力。为确保骑手脚的稳定性和支持,车轮 220 的侧向曲率是虚拟圆或椭圆的弧线,以大于平台 240 高度的高度为中心。在其他实施例中,虚拟圆或椭圆可能更大,以提供额外的稳定性和舒适性,但代价是具有更大的转弯半径。例如,虚拟圆环或椭圆中心的高度可能大于骑手的脚踝高度,也可能大于骑手质量中心的高度。
45.运输器210的另一个特点是定向平台。前一个实施例的平台上前后尺寸对称,因此骑手在站立于运输器上时可以面对任一方向,而平台 240 则以一个方向比另一个方向向车轮延伸得更远。平台 240 的较长端被指定为前进。这种定向设计通过考虑人脚和脚踝的比例和机制,让骑手拥有更舒适和自然的姿势,而对称的设计可能会导致骑手腿部和脚踝疲劳。平台 240 的前部或背面可提供凹槽或切口 241,用作携带手柄。本发明运输器的任何实施例可包括定向外壳和平台。
46.图10-14显示运输器210配备了各种附加元件。这些附件和其他附件可以拆卸和互换的耦合到运输器,以允许不同的骑行姿势,改变或增强运输器的功能,或使用运输器作为各种形式的车辆的驱动和控制模块。运输器 210 可能至少有一个连接附件的点可与附件耦合。每个连接点可与多个附件互换的连接,提供通用位置和耦合方法,并使用户能够轻松更换附件。附件连接点可与车轮的旋转轴线同线。运输器 210 可提供适用于不同附件的不同软件模式,并可自动检测当前配备的附件并切换到相应的软件模式。检测可以通过机械或电子方式实现。电子连接器还可用于其他功能,例如为附件上的功能或装饰灯供电和控制,以及其他可能性。
47.图 10 显示运输器 210 配备左右脚支撑件250 耦合到运输器 210 的两侧。此附件的其他实施例可以是由两个脚的支撑件和为一块,而不是作为两个单独的器件。脚支撑件 250 从运输器 210 的两侧横向延伸,可以支撑骑手的脚,允许骑手把单脚运输器作为完整的双脚车辆。由于以这种方式骑行的车必须向一侧倾斜,以便骑手一次上一只脚,因此与脚部支撑附件相关的软件模式可能包括上下车模式,其中平衡功能在运输器倾斜过特定角度时暂停,也可能考虑其他条件,如行驶速度、骑手的存在或转向。
48.图11显示运输器210配备了滑板配件260,包括一个板261,其后半部分由滑板轮架263支持,并两个轮子264。主板261的前面有一个凹槽262,来接收和可旋转的配接到运输器210。用户一只脚站在板261上像传统的滑板,一只脚站在运输器210。骑手可以用前脚前后俯仰的倾斜运输器 210 来控制滑板的加速和减速。后脚可以通过横向倾斜板 261 来控制转弯,其方式类似于传统的滑板。
49.图12显示运输器210配备了另一个实施例的滑板配件270,有一个板271。这个滑板配件不同于图11的滑板配件260,因为板271的形状像一个传统的滑板,板271的前部被运输器210的顶部所支持。板 271 具有一个接头 272,允许板 271 的前部和后部在前后方向相对倾斜,允许运输器 210 向前和向后倾斜。运输器210和滑板配件270的操作与图11所述的运输器类似。
50.组合装置和滑板配件也可以作为一个完整的电动滑板,使用自动平衡运输器驱动单元作为驱动方法,而不可分离地耦合在一起。由于驱动单元是滑板的永久组件,因此电池和/或控制电路不需要位于驱动单元内或与驱动单元相邻,并且可以位于滑板内的任何地方或滑板上的任意位置。
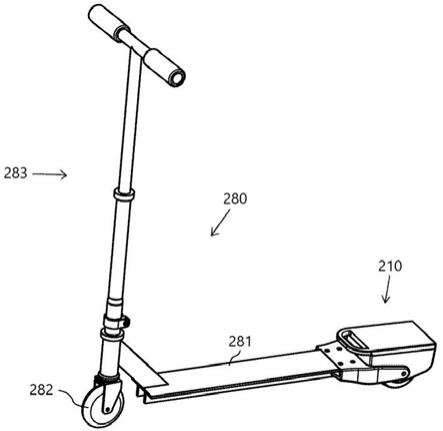
51.图 13 显示了配备滑板车配件 280 的运输器 210。滑板车配件包括纵向定向站立表面281,前轮282,和手柄结构283,可用于控制运输器轮282的转向,为传统的脚蹬滑板车的风格。运输器 210 可转动的连接到站立表面 281 的后部,取代传统的脚蹬滑板车的后轮,用户一脚站在站立表面281,另一只脚站在运输器210,使运输器210可以用来驱动该组合装置和滑板车。
52.组合的装置和滑板车配件也可以不可分离的耦合为一个完整的电动滑板车使用自动平衡运输器驱动单元作为其驱动方法。由于驱动单元是滑板车的永久部件,因此电池和/或控制电路不需要位于驱动单元内或与驱动单元相邻,并且可以位于滑板车的任意位置上。
53.图 14 显示了两个单元的运输器 210, 211 配备了另一个滑板车配件 290,滑板车附件包括手柄结构293,可用于控制前轮292的转向,以及框架结构294,本实施例包括左框架件294a和右框架件294b,从手柄结构293向后延伸。运输器 210 可转动的配接到左框架件 294a 的后部,运输器 211 可转动的配接到右机架件 294b 的后端。前轮 292 可以是脚轮。
54.组合装置和滑板车配件也可以作为一个完整的电动滑板车,使用自动平衡运输器驱动单元作为其驱动方法而不可分离的耦合。由于驱动单元是滑板车的永久部件,因此电池和/或控制电路不需要位于驱动单元内或与驱动单元相邻,并且可以位于滑板车的任意位置上。
55.应当认识到,虽然自动平衡是这些运输器的优选技术,但运输器可以单独或以各
种组合来使用压力传感器或躯干传感器或其他传感器,而无需离开驱动轮位于脚平台下、单脚平台和/或本发明的其他发明方面。虽然本发明已与该实施例的特定实施方式有关,将理解为它能够进一步修改,本专利申请旨在涵盖本发明在一般原则之后的任何变化、用途或适应,并包括本发明所涉及的本领域已知或习惯惯例的、可能适用于本文所述的基本特征,并且属于本发明的范围和所附权利要求的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1