一种映射对应方式转向控制系统及方法与流程
[0001]
本发明涉及无人车控制转向系统及方法,属于无人车转向控制领域。
背景技术:
[0002]
现有对无人车上的转弯控制技术,采用逐渐对比的方式实现转弯,例如:左转10度,转向电机就会逐步的转动,使转向转到10度。如果这时右转十度,电机会执行完毕上次转动指令之后再执行下一条指令,这样反应速度降低,转动效率低。
技术实现要素:
[0003]
本发明是为了解决现有的转弯控制技术反应速度低、转动效率低的问题。现提供一种映射对应方式控制转向系统及方法。
[0004]
一种映射对应方式转向控制方法,所述方法包括以下步骤:
[0005]
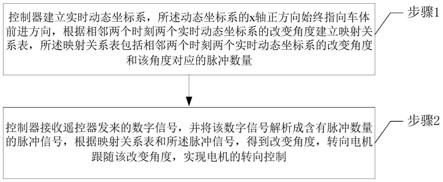
步骤1、控制器建立实时动态坐标系,所述动态坐标系的x轴正方向始终指向车体前进方向,根据相邻两个时刻两个实时动态坐标系的改变角度建立映射关系表,所述映射关系表包括相邻两个时刻两个实时动态坐标系的改变角度和该角度对应的脉冲数量,
[0006]
步骤2、控制器接收遥控器发来的数字信号,并将该数字信号解析成含有脉冲数量的脉冲信号,根据映射关系表和所述脉冲信号,得到改变角度,转向电机跟随该改变角度,实现电机的转向控制。
[0007]
优选地,脉冲数量共为36000个。
[0008]
优选地,改变角度为负90度至正90度。
[0009]
一种映射对应方式转向控制系统,所述系统包括控制器,
[0010]
控制器安装在无机车上,
[0011]
控制器,用于建立实时动态坐标系,所述动态坐标系的x轴正方向始终指向车体前进方向,根据相邻两个时刻两个实时动态坐标系的改变角度建立映射关系表,所述映射关系表包括相邻两个时刻两个实时动态坐标系的改变角度和该角度对应的脉冲数量,当控制器接收到遥控器发来的数字信号时,将该数字信号解析成含有脉冲数量的脉冲信号,根据映射关系表和所述脉冲信号,得到改变角度,转向电机跟随该改变角度,实现电机的转向控制。
[0012]
优选地,脉冲数量共为36000个。
[0013]
优选地,改变角度为负90度至正90度。
[0014]
本发明的有益效果为:
[0015]
本申请在控制器内建立实时动态坐标系,车体前进的方向发生改变时,动态坐标系也会随着转动,保证动态坐标系的x轴始终指向车体前进的方向,与现有技术(现有技术为:当车辆执行向左转20度过程中要求立刻右转30度,只能先执行完左转20度再右转30度,不能立刻执行右转30度)相比建立实时坐标系的方法转向方向好,控制转向更灵活,
[0016]
本申请建立映射关系表,该表根据动态坐标系内的角度,建立36000个脉冲;当控
制器接收到遥控器或者其他外部遥控设备发送的转向命令后,控制器会根据内部的映射关系表,得到改变角度,从而控制转向电机转向该改变角度。本申请采用脉冲控制转向电机,转弯速度快,相比现有方式转动效率低,例如当外部遥控设备发出左转10度的命令后,控制器会根据内部的映射关系表发出100个脉冲,此时转向电机就会左转10度,而当外部遥控设备发出左转10度的命令后,转向电机左转到6度时,控制器又接收到右转3度命令时,转向电机会立刻执行右转3度的命令,而不是先执行完左转10度在执行右转3的。因此,本申请能够快速相应外部遥控设备的指令。
附图说明
[0017]
图1为一种映射对应方式转向控制方法的流程图。
具体实施方式
[0018]
具体实施方式一:参照图1具体说明本实施方式,本实施方式所述的一种映射对应方式转向控制方法,所述方法包括以下步骤:
[0019]
步骤1、控制器建立实时动态坐标系,所述动态坐标系的x轴正方向始终指向车体前进方向,根据相邻两个时刻两个实时动态坐标系的改变角度建立映射关系表,所述映射关系表包括相邻两个时刻两个实时动态坐标系的改变角度和该角度对应的脉冲数量,
[0020]
步骤2、控制器接收遥控器发来的数字信号,并将该数字信号解析成含有脉冲数量的脉冲信号,根据映射关系表和所述脉冲信号,得到改变角度,转向电机跟随该改变角度,实现电机的转向控制。
[0021]
本实施方式中,本申请建立实时动态坐标系,坐标系的x轴始终按车体即将前进的方向,每次收到新的转向时,按照新的方向建立新的坐标系,但是新的坐标系的x轴正方向始终指向车体前进方向。
[0022]
控制器的程序算法采用建立一个指针,该指针随时指向新的方向坐标,指针和转向角按照角度的大小,分成36000个脉冲。
[0023]
具体实施方式二:本实施方式是对具体实施方式一所述的一种映射对应方式控制转向方法作进一步说明,本实施方式中,脉冲数量共为36000个。
[0024]
具体实施方式三:本实施方式是对具体实施方式一所述的一种映射对应方式控制转向方法作进一步说明,本实施方式中,改变角度为负90度至正90度。
[0025]
具体实施方式四:本实施方式所述的一种映射对应方式转向控制系统,本实施方式中,所述系统包括控制器,
[0026]
控制器安装在无机车上,
[0027]
控制器,用于建立实时动态坐标系,所述动态坐标系的x轴正方向始终指向车体前进方向,根据相邻两个时刻两个实时动态坐标系的改变角度建立映射关系表,所述映射关系表包括相邻两个时刻两个实时动态坐标系的改变角度和该角度对应的脉冲数量,当控制器接收到遥控器发来的数字信号时,将该数字信号解析成含有脉冲数量的脉冲信号,根据映射关系表和所述脉冲信号,得到改变角度,转向电机跟随该改变角度,实现电机的转向控制。
[0028]
本实施方式中,本申请的转向电机可以快速的相应遥控器发送的脉冲信号。
[0029]
本申请的映射关系表包括不同改变角度和不同改变角度对应的脉冲数量,当接收到脉冲信号时,按照映射关系表中该信号对应的改变角度,控制转向电机转向该改变角度。所以,本申请的转向电机转向速度快、响应快。
[0030]
具体实施方式五:本实施方式是对具体实施方式四所述的一种映射对应方式控制转向方法作进一步说明,本实施方式中,脉冲数量共为36000个。
[0031]
具体实施方式六:本实施方式是对具体实施方式四所述的一种映射对应方式控制转向方法作进一步说明,本实施方式中,改变角度为负90度至正90度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1