一种能够保证货物稳定性的物流车的制作方法
[0001]
本申请涉及物流转运的领域,尤其是涉及一种能够保证货物稳定性的物流车。
背景技术:
[0002]
在物流仓储行业,经常会使用物流推车来运输货物,工作人员在对物流推车上的货物进行装卸时,经常需要据实际情况将货物从高处搬运到低处,或将货物从低处搬运到高处,劳动强度大,工作效率低下,因此出现了能够调节托盘高度的物流推车。
[0003]
授权公告号为cn206749848u的中国专利公开了一种高度可调节的载物手推车,包括手推车支撑架和可移动平台,手推车支撑架底部设置有前轮和后轮,手推车支撑架上设置有手扶架,手扶架的下端与手推车支撑架固定连接,还包括剪叉机构、丝杆和摇杆,剪叉机构由两组相对的上剪叉臂机构和两组相对的下剪叉臂机构组成,通过手摇剪叉丝杆传动结构实现载物手推车的平台升降。
[0004]
上述中的现有技术方案存在以下缺陷:在升降过程中,可移动平台上的货物可能发生晃动导致货物从可移动平台上滑落到地面上,进而导致货物损坏。
技术实现要素:
[0005]
针对现有技术存在的不足,本实用新型的目的是提供一种能够保证货物稳定性的物流车,具有能够使货物在升降过程中保持稳定的优点。
[0006]
本实用新型的上述实用新型目的是通过以下技术方案得以实现的:
[0007]
一种能够保证货物稳定性的物流车,包括底座,所述底座底部设置有脚轮,所述底座上设置有升降平台和驱动升降平台升降的升降机构,所述升降平台上设置有夹紧装置,所述夹紧装置包括两组平行设置的夹板,所述夹板与升降平台滑动连接,所述升降平台上转动连接有传动杆,所述传动杆两端设置有旋向相反的螺纹,且分别螺纹连接有一组夹板,所述升降平台上设置有驱动传动杆旋转的电机。
[0008]
通过采用上述技术方案,将货物装到升降平台上之后,启动电机,电机驱动传动杆旋转,传动杆通过螺纹配合带动夹板移动,因为传动杆两端的螺纹反向,所以两夹板会相互靠近对货物进行抵紧,使货物在升降平台升降的过程中保持稳定,不易发生滑移。
[0009]
优选的,所述升降平台上设置有传送机构,所述传送机构包括设置在传动杆中的主动带轮,所述升降平台远离传动杆的一侧转动连接有从动带轮,所述主动带轮和从动带轮上卷绕有传送带。
[0010]
通过采用上述技术方案,当升降平台上升和合适高度后,传动杆带动两夹板相互远离,同时传动杆带动主动带轮旋转,主动轮带动传送带运转,将升降平台上的货物自动卸下,使用较为方便。
[0011]
优选的,所述传动杆上每段螺纹的两端分别设置有光滑段,其中一组光滑段上设置有第一挡环,另一组光滑段上设置有第二挡环,所述第一挡环和第二挡环相互靠近的一侧分别设置有压缩弹簧。
[0012]
通过采用上述技术方案,传动杆在驱动传动带运转对货物进行装卸时,当夹板移动到极限位置后与传动杆上的螺纹脱离进入光滑段,此时夹板与转动杆滑动连接不会移动,当装货时传动杆反转,挡板在压缩弹簧弹力作用下与传动杆螺纹配合。
[0013]
优选的,所述升降平台上转动连接有与传动杆平行设置的传送辊。
[0014]
通过采用上述技术方案,在传送带带动升降平台上的货物移动时,传送辊一方面起到支撑作用,减小货物对传动带的压力,另一方面在货物移动时,传送辊同步滚动,将滑动摩擦转化为滚动摩擦,摩擦力较小,使货物更加容易移动。
[0015]
优选的,所述升降机构包括相互铰接的第一剪叉臂和第二剪叉臂,所述第一剪叉臂顶端与升降平台转连接,底端与底座铰接,所述第二剪叉臂顶端与升降平台铰接,底端与底座滑动连接,所述第一剪叉臂上设置有第一横梁,所述第二剪叉臂上设置有第二横梁,所述第一横梁上铰接有电动推杆,所述电动推杆的伸缩部与第二横梁铰接。
[0016]
通过采用上述技术方案,在进行升降时,电动推杆伸长驱使第一剪叉臂和第二剪叉臂转动,进而驱使升价平台进行升降,承载时运行起来较为平稳。
[0017]
优选的,所述夹板远离传动杆的一端底部设置有导向块,所述升降平台上开设有与导向块滑动配合的导向槽。
[0018]
通过采用上述技术方案,传动杆驱使夹板平移进行夹紧时,导向槽和导向块的配合能够使夹板能够保持稳定,不会因为受力不均发生偏转。
[0019]
优选的,所述传送带为内周表面设有等间距齿形的环行带,所述主动带轮和从动带轮上沿周向设置有与传送带啮合的齿形。
[0020]
通过采用上述技术方案,使主动带轮和从动带轮在与传送带传动过程中不易发生滑动,传动更加稳定。
[0021]
优选的,所述底座上设置有手扶架,所述手扶架包括与底座连接的伸缩杆和与伸缩杆连接的扶手。
[0022]
通过采用上述技术方案,工作人员通过手扶架推动物流车移动,并且能够通过伸缩杆的伸缩适应不同身高的人员使用。
[0023]
综上所述,本申请包括以下至少一种有益技术效果:
[0024]
通过设置两组夹板和传动杆,在升降过程中驱动杆驱使两夹板相互靠近,对升降平台上的货物进行夹紧,避免货物发生滑动,使货物在升降过程中更加稳定;
[0025]
通过在传动杆上设置主动带轮并套设传送带,能够通过传动杆驱动传送带运转,进而使传送带对货物进行装卸。
附图说明
[0026]
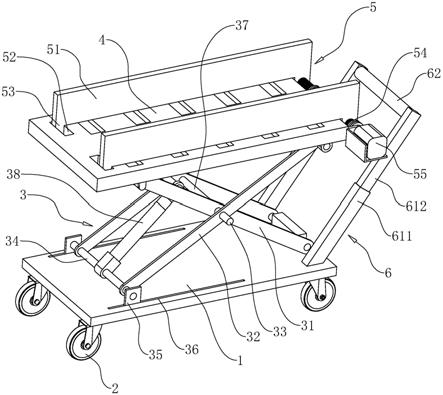
图1是本实用新型的主视图;
[0027]
图2是图1中升降平台的结构示意图;
[0028]
图3是图1中传动杆及与传动杆配合的机构的结构示意图。
[0029]
附图标记说明:1、底座;2、脚轮;3、升降机构;31、第一剪叉臂;32、第二剪叉臂;33、转轴;34、第一横梁;35、滑块;36、滑槽;37、第二横梁;38、电动推杆;4、升降平台;5、夹紧装置;51、夹板;52、导向块;53、导向槽;54、传动杆;55、电机;6、手扶架;61、伸缩杆;611、滑杆;612、滑套;62、扶手;7、避空槽;8、传送辊;91、主动带轮;92、从动带轮;93、传送带;10、光滑
段;11、第一挡环;12、第二挡环;13、压缩弹簧。
具体实施方式
[0030]
以下结合附图对本申请作进一步详细说明。
[0031]
参照图1,为本实用新型公开的一种能够保证货物稳定性的物流车,包括底座1,底座1下表面四角分别固定有脚轮2,脚轮2为刹车万向轮,底座1上表面设置有升降机构3,升降机构3的顶部设置有升降平台4,升降平台4上设置有夹紧装置5,底座1一端设置有手扶架6。
[0032]
手扶架6包括两组倾斜设置的伸缩杆61和一组扶手62,伸缩杆61包括固定连接在底座1上的滑套612和滑动插接在滑套612内的滑杆611,滑杆611和滑套612之间通过摩擦力进行定位,滑杆611远离滑槽36的一端与扶手62的一端固定连接。
[0033]
升降机构3包括第一剪叉臂31和第二剪叉臂32,所述第一剪叉臂31和第二剪叉臂32的中部通过水平设置的转轴33铰接,第一剪叉臂31的底端设置有第一横梁34,第一横梁34两端分别固定连接有滑块35,底座1上开设有与滑块35滑动配合的滑槽36,第一横梁34顶端与升降平台4的下表面铰接,第二剪叉臂32的顶端与升降平台4的下面滑动连接,底端与底座1铰接。
[0034]
第二剪叉臂32上设置有第二横梁37,第一横梁34上转动连接有连接座,连接座上固定有电动推杆38,电动推杆38的电动推杆38的伸缩部与第二横梁37铰接,电动推杆38通过电源线与外部电源连通,当电动推杆38的伸缩部伸出时,驱动第一剪叉臂31和第二剪叉臂32绕转轴33旋转,同时滑块35在滑槽36内滑动,使升降平台4远离底座1向上移动。
[0035]
夹紧装置5包括两组平行设置的夹板51,夹板51一端的底部固定有导向块52,升降平台4上表面开设有与夹板51垂直的导向槽53,升降平台4远离导向槽53的一端转动连接有传动杆54,传动杆54两端开设有旋向相反的螺纹,传动杆54两端分别与一组夹板51螺纹连接,升降平台4上固定安装有电机55,电机55与传动杆54同轴连接,电机55通过电源线与外部电源连接,电机55启动时带动传动杆54旋转,传动杆54带动两组夹板51相互靠近或相互远离。
[0036]
参照图2,升降平台4上开设有多组避空槽7,避空槽7内转动连接有沿升降平台4宽度方向设置的传送辊8。
[0037]
参照图2和图3,升降平台4上设置有传送机构,传送机构包括同轴固定在传动杆54上的主动带轮91,升降平台4远离传动杆54的一侧转动连接有从动带轮92,主动带轮91和从动带轮92上卷绕有传送带93,传送带93的上表面高于传送辊8的最高点,当传动杆54旋转时带动主动带轮91旋转,主动轮带动传送带93运转。
[0038]
传送带93为内周表面设有等间距齿形的环行带,主动带轮91和从动带轮92上沿周向设置有与传送带93啮合的齿形。
[0039]
传动杆54上每段螺纹的两端分别设置有光滑段10,其中一组光滑段10上设置有第一挡环11,另一组光滑段10上设置有第二挡环12,第一挡环11和第二挡环12相互靠近的一侧分别设置有压缩弹簧13,当传动杆54正向旋转使两挡板相互远离到极限位置时,两挡板接触螺纹连接进入光滑段10,此时传动杆54继续正转时挡板与传动杆54滑动配合,挡板不会移动,当传动杆54开始反向旋转时,压缩弹簧13驱使挡板移动,使挡板恢复与传动杆54的
螺纹连接,两挡板在传动杆54的带动下相互靠近;同样的当两组挡板靠近到极限距离后脱离与传动杆54的螺纹连接,避免两挡板超出极限行程发生损坏。
[0040]
本实施例的实施原理为:将货物装到升降平台4上之后,启动电机55,电机55驱动传动杆54反向旋转,传动杆54驱动两夹板51相互靠近对货物进行抵紧,同时传动杆54带动传送带93运转,将货物移动到升降平台4的中心位置;
[0041]
然后启动电动推杆38,电动推杆38驱动第一剪叉臂31和第二剪叉臂32旋转,进入使升降平台4上升;接着通过推动手扶架6使物流车移动,当移动到合适位置后,启动电机55,使电机55驱动传动杆54正向旋转,传动杆54驱使两夹板51相互远离,同时传动杆54带动传送带93运转,将升降平台4上的货物卸下。
[0042]
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1