带有可调牵引配重的移动机器人的制作方法
1.本发明涉及一种基本移动机器人,其可配置用于不同的应用,包括装载在移动机器人顶部的货物的运输、推车牵拉或在室内自动拖拉材料。更具体地,本发明涉及一种移动机器人,其中可以调节驱动轮上的重量以实现用于相关应用的移动机器人的最佳牵引力和制动性能。
背景技术:
2.在一个结构内或多个结构之间的物品运输在某种程度上已经造成了问题。如今,许多运输选项作为商业产品存在,例如传送带、气动管、万向推车和移动机器人。移动机器人或自动导引车(agv)是配备了计算机控制下的驱动系统的车辆,允许在两个位置之间进行自主导引。
3.具有安装在agv上的牵引装置的牵引拖车在本领域中是众所周知的。通常,商业挂钩和球安装在agv的一端,通常是后部,在此连接包括可释放插座和牵引杆的拖车。
4.用于在室内输送或运输材料的机器人和自动化车辆已经在若干应用中开发和利用。众所周知的应用是自动化邮件输送车辆和机器人。
5.专利申请us2004093650a1(和对应的专利us7066291b2)公开一种用于执行多个单独操作的移动机器人系统,包括具有至少一个轮驱动电机的至少一个自主轮式移动机器人、一个车载计算机;在有移动障碍物的环境中导航、定向和机动的装置;传感器系统;和用于接收和发送信号的无线通信系统。us2004093650/us7066291b2中公开的移动机器人系统可用于使用联接挂钩钩杆作为推车附接机构在各种推车或货车上拖拉材料。同时,推车附接机构us2004093650不能在枢轴点上自由移动,不适合在不平坦的支架上拖拉推车;例如,在门框上。
6.移动机器人通常设有一个或若干驱动轮,以及一个或几个支撑轮,例如脚轮。
7.一种流行的构造是将驱动轮放置在优选为矩形的移动机器人底盘的两个长边的每一个的中间。每个驱动轮由一个单独的可控电机驱动。另外,机器人由四个脚轮支撑;在底盘的每个拐角处有一个。
8.移动机器人可以双向驱动,并通过以不同速度或相对于彼此相反的方向驱动驱动轮来转向。专利申请wo2016165721公开了一种用于自动对接和牵拉推车的机器人推车牵拉车辆,诸如轮式医院推车,例如亚麻布。具体地,机器人车辆配备有用于保持推车的抓握装置。该车辆具有矩形底盘,驱动轮放置在两个长边底盘的每一个的中间,四个脚轮;在底盘的每个拐角处有一个。
9.同时,根据wo2016165721的车辆的拉力受到驱动轮和支架之间的可用摩擦力的限制。如果某个应用需要更好的牵引力,可以通过在机器人顶部增加额外的重量来增加驱动轮和支架之间的摩擦力。然而,这种额外的重量对机器人的整体能效和安全性具有负面影响。
10.在优选版本中,两个驱动轮中的每一个都通过转向架臂与(前)脚轮机械互连。机
器人底盘由转向架臂的枢轴点和一组后脚轮支撑。每个驱动轮由一个单独的可控电机驱动。
11.转向架构造允许机器人在不平坦表面上移动。
12.cn208774905u注册实用新型(和对应的申请cn108725626)显示了这种基本构造的示例。其示出一个agv,其驱动轮放置在矩形移动机器人底盘的两个长边的中间。每个驱动轮由电机驱动。另外,移动机器人由四个脚轮支撑;在底盘的每个拐角处有一个。两个驱动轮中的每一个都通过转向架臂与(前)脚轮机械互连。机器人底盘由转向架臂的枢轴点和一组后脚轮支撑。
13.要驱动(和停止)移动机器人,包括其可能的顶部负载和/或可能的推车,而不打滑,驱动轮和表面之间必须有一定的摩擦力。驱动轮与地面之间产生的摩擦力由驱动轮表面与地板表面之间的摩擦系数以及作用在驱动轮上所产生的重力决定。
14.驱动轮打滑会导致运输效率低下和制动性能低下。
15.此外,移动机器人的导航系统通常基于或至少支持从驱动马达、驱动齿轮、驱动轴和/或驱动轮接收输入的里程表。因此,驱动轮的任何滑动都会导致有关行驶距离的错误信息。
16.cn208774905u建议在底盘框架和转向架臂之间设置一组可调预加载弹簧。通过调节这些弹簧的负载,可以改变分别作用在驱动轮和前脚轮上的重力分布。由此可以增加驱动轮和支撑件之间的摩擦力。然而,由此减少了前脚轮与支撑件之间的摩擦力并最终减少了接触,这将对车辆的驱动/转向能力产生负面影响。
17.如果移动机器人本身(包括可能的顶部负载)没有足够的重量来为给定应用中的驱动轮提供所需的摩擦力,则已知会在移动机器人的顶部增加额外的重量。然而,任何额外的重量通常会降低移动机器人的整体效率,并导致机器人电池充电之间的操作时间更短。
18.机器人顶部的额外重量也可能危及移动机器人的整体安全性。增加额外的重量可能会导致更高的质心点,这又可能导致移动机器人在制动期间倾翻的风险更高。
19.在具有2个驱动轮和4个脚轮的移动机器人上,任何额外的重量都会作用在驱动轮上,但也会作用在至少一个,通常是两个支撑脚轮上。
20.脚轮上增加的重量确实再次增加了对驱动轮更好牵引力的需求。因此,需要增加相对较大的重量才能在驱动轮上获得足够的牵引力。额外的重量增加了移动机器人的能量消耗,并且可能挑战制动性能并可能增加倾斜风险。
21.本发明的目的是改进现有技术并且提供一种基本移动机器人,其驱动轮上的牵引力可以相对容易地针对预期应用进行优化,而不会影响安全性,并且对整体操作效率的影响最小。
技术实现要素:
22.本发明提供了一种改善的移动机器人,用于从一个位置到另一个位置的自动进站和牵引/拖拉推车和类似货车,或用于在移动机器人顶部运输有效负载。移动机器人实现用于在走廊上导航的导航系统。导航系统优选地包括从驱动电机接收输入的里程表。移动机器人还包括一个或多个传感器,用于指示机器人相对于周围环境的位置,以避免不必要的冲击。
23.通过连接驱动轮和(前)脚轮的转向架臂以及模块化牵引配重块的创造性设计,通过将一个或多个配重模块附接到转向架臂的延伸部,可以增加作用在驱动轮上的重力和产生的摩擦力,而由于悬臂效应,作用在(前)脚轮上的产生的重力会减小。因此,相对容易地在驱动轮上为预期应用实现足够的牵引力,而不会影响安全性,并且对移动机器人的整体能效的影响最小。
24.通过使牵引配重块的质心处于低于整个移动机器人的重心的水平,降低了在制动或转弯情况下倾翻的风险。
25.通过使牵引配重块的质心低于转向架臂的枢轴点并尽可能低,牵引配重的惯性有助于在制动过程中向下压驱动轮,从而增加驱动轮的摩擦力和制动性能。
26.由此,本发明可以针对给定应用轻松优化移动机器人的牵引、导航、制动性能和安全性,同时对机器人的整体能效影响最小。
附图说明
27.为了更好地理解本发明并且了解其实际应用,提供并参考以下附图。附图仅作为实例给出,并且绝不应限制本发明的范围。
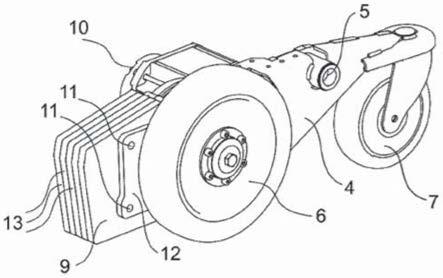
28.图1a描绘了移动机器人和右侧转向架臂,其具有枢轴点、后脚轮、牵引配重模块、驱动轮、前脚轮和安装在转向架臂延伸部上的牵引配重;
29.图1b呈现右侧驱动轮和右侧前脚轮的倾斜底侧/右侧视图;
30.图2a呈现了移动机器人的驱动轮的可用牵引力,该牵引力与机器人重力对地面产生的法向力成正比,并取决于地面与轮螺纹之间的摩擦系数;
31.图2b呈现可以通过驱动轮传递到地面的最大扭矩;
32.图2c呈现驱动轮对地面的法向力来自于机器人对转向架枢轴点施压的重量和转向架自身的重力;
33.图2d枢轴点的力来自机器人上的负载和机器人质量;
34.图2e呈现了在驱动轮后面的一组转向架臂延伸部上增加一组牵引配重块,增加了作用在驱动轮上的重力,而减小了作用在前脚轮上的重力;
35.图3a-c呈现了右侧转向架臂的不同侧面视图(a、b、c),带有枢轴点、后脚轮、牵引配重块、驱动轮、前脚轮,安装在转向架臂延伸部上:
36.(a)从外侧观察转向架臂,
37.(b)从内侧观察转向架臂,
38.(c)从机器人的右侧和下方观察转向架臂,显示从右侧覆盖转向架臂的外壳;
39.图4分解图,示出了右侧驱动电机(包括驱动电机的齿轮箱)、整个转向架臂(其枢轴点和转向架臂延伸部适用于牵引配重块的附接)、前脚轮、驱动轮、驱动轮轴承、用于附接驱动轮的装置(环和螺钉)以及一个牵引配重块,其由5个配重模块组成,带有一组对齐的螺栓孔,可以与转向架臂延伸部上的一组匹配孔对齐,用于将配重模块用螺栓固定到转向架臂延伸部上。牵引配重块的一端和配重模块分别成形为适合驱动电机的齿轮箱。
40.附图
–
附图标记
41.1 移动机器人;
42.2 移动机器人的优选前端;
43.3 移动机器人的优选后端;
44.4 转向架臂;
45.5 转向器臂的枢轴点;
46.6 驱动轮;
47.7 前脚轮;
48.8 后脚轮;
49.9 牵引配重块(包括配重模块);
50.10 电机/制动器,其通过齿轮箱连接到驱动轮;
51.11 用于安装牵引配重块的附接孔;
52.12 转向架臂延伸部;
53.13 牵引配重块的配重模块;
54.14 机器人底盘;
55.15 机器人顶部;
56.16 外壳(覆盖移动机器人的至少侧面)。
57.17 顶部模块或机器人顶部上的负载。
具体实施方式
58.本章描述了转向架臂4和牵引配重块9的创造性设计(图1a、b),通过将一个或多个配重模块13附接到转向架臂延伸部12,可以增加作用在驱动轮6上的重力和产生的摩擦力,同时由于悬臂效应,作用在(前)脚轮7上的产生的重力减少。因此,相对容易在驱动轮6上为预期应用实现足够的牵引力,而不会影响安全性,并且对移动机器人1的整体能效的影响最小。
59.移动机器人的驱动轮6的可用牵引力与机器人重力对地面产生的法向力成正比,并取决于地面与轮螺纹之间的摩擦系数(图2a):
60.f
t
=fn*μ
61.其中μ是摩擦系数;fn是法向力。
62.机器人驱动轮能够相应地传递扭矩。可以通过驱动轮(图2b)传递到地面的最大扭矩可以描述为:
63.m
最大
=f
t
*r
64.其中r是驱动轮的半径。
65.扭矩由通过齿轮箱连接到驱动轮的电机或制动器产生。如果扭矩高于m
最大
会在地面上打滑。
66.驱动轮对地面的法向力fn来自机器人对转向架枢轴点施压的重量和转向架本身的重力(图2c):
[0067][0068]
[0069]
其中:
[0070]
l1,l2,l3,l4是到反作用力的距离;
[0071]fp
是转向架枢轴点上没有转向架的机器人重力产生的力。假设负载在左右转向架之间平均分配,这就是计算中f
p
除以2的原因;
[0072]fg-b
为转向架重力;
[0073]fn-fc
是前脚轮对地面的法向力。
[0074]
枢轴点中的力来自机器人上的负载和机器人质量(图2d):
[0075][0076][0077]
其中:
[0078]fg-l
是来自负载重力的力;
[0079]fg-r
是来自无转向架机器人重力的力;
[0080]fn-rc
是来自后脚轮的对地面的法线。
[0081]
当在驱动轮6后面的一组转向架臂延伸部12上增加一组配重模块13时,作用在驱动轮6上的重力增大,而作用在前脚轮7上的重力减小(图2e)。因此,可以实现足够的牵引力,而对性能没有影响或至少影响最小,并且不会损害机器人的安全性。
[0082]fg-b
=f
g-bt
+f
g-t
[0083][0084]
其中:
[0085]fg-t
是来自牵引配重块9的重力的力;
[0086]fg-bt
是来自没有牵引配重的转向架的重力的力。
[0087]
通过将牵引重量块9直接安装在转向架臂延伸部12上,移动机器人1的总质量可以显著减小并且仍然获得正确的牵引力,就好像更大的负载17被放置在移动机器人1的顶部表面15上一样。
[0088]
当减少移动机器人1的总质量时,效率提高并且因此电池运行时间增加,因为动力传动系统是电池的主要消耗者之一。
[0089]
具体地,本发明的一个优选实施方案提供:
[0090]
■
一种具有底盘14的移动机器人1,该底盘14具有优选的前端2和优选的后端3,该移动机器人包括:
[0091]
○
移动机器人1中心的一对驱动轮6,
[0092]
■
其中驱动轮组6优选地通过驱动轴和齿轮箱联接到一组驱动电机10,
[0093]
·
每个驱动电机10可通过移动机器人的控制系统在两个方向上单独控制,允许机器人1在两个方向上驱动并围绕其垂直中心轴进行(大约)360度转动;
[0094]
■
一对(前)脚轮7,位于移动机器人1的一端(优选前端)的拐角处;
[0095]
■
在移动机器人1的另一(优选后)端的一组(后)脚轮8:
[0096]
○
其中,一对驱动轮6通过一对具有枢轴点5的转向架臂4与一对(前)脚轮7机械互连,
[0097]
○
机器人底盘14由枢轴点5处的转向架臂4和两个(后)脚轮8支撑,
[0098]
■
其中,转向架臂4具有转向架臂延伸部12,转向架臂延伸部12在驱动轮6的轴线的后面(从移动机器人的优选前端2看)突出,
[0099]
■
其中转向架臂延伸部12适于安装牵引配重块9,该牵引配重块9包括一个或多个配重模块13;
[0100]
■
顶部表面15,适于将各种顶部模块或负载17安装到机器人14的底盘上;
[0101]
■
其中顶部模块17的可选类型可以包括:
[0102]
·
用于将推车或轮式库存、支架联接到所述移动机器人的附接机构,
[0103]
·
运输平台、箱或搁架,
[0104]
·
操纵器,诸如机器人臂,
[0105]
·
升降机构,用于升降托盘或库存支架
[0106]
·
和/或用于装载/卸载物品的传送机构;
[0107]
■
外壳16,至少覆盖移动机器人1的侧面,其中外壳16在机器人侧面的至少部分是可拆卸的,以便提供容易接近一个或多个牵引配重块9。
[0108]
在替代实施方案中,转向架臂延伸部12的确切形式可以适应移动机器人1的尺寸和形状及其预期应用。承载牵引配重块9的转向架臂延伸部12的部分的长度和形式可以变化以允许附接不同数量、类型和尺寸的配重模块13。
[0109]
牵引配重块9优选设计为一个或多个配重模块13,优选金属板,适于固定到转向架臂延伸部12。
[0110]
转向架臂延伸部12和配重模块13优选地设有一个或多个对齐的孔11,用于通过一组螺栓和螺母将最佳数量的配重模块13固定到转向架臂延伸部12(图4)。
[0111]
在优选实施方案中,一个或多个牵引配重块9的一端具有与驱动电机10和/或可能的齿轮箱的形状相匹配的形状,从而可以利用用于放置额外配重模块13的可用空间。
[0112]
此外,转向架臂延伸部12可适于允许牵引配重块9在距驱动轮6的中心不同距离处附接到转向架臂4。因此,通过向移动机器人1增加最小的额外重量,允许针对移动机器人1的给定应用优化驱动轮6的牵引力。
[0113]
通过该解决方案,实现了重量的增加确实增加了驱动轮上的牵引力而不增加支撑脚轮的摩擦力。此外,实现了提高断裂性能,同时降低了倾斜的风险。
[0114]
引用列表
[0115]
专利文献
[0116]
·
专利申请us2004093650a1/专利us7066291b2.g.martins等人机器人系统(g.martins et al.robot system)。
[0117]
·
专利申请wo2016165721。niels jul jacobsen。用于自动牵拉推车的机器人推车牵拉车辆(niels jul jacobsen.robotic cart pulling vehicle for automated pulling of carts)
[0118]
·
注册实用新型cn208774905u/申请cn108725626。zeng chao。agv的一种底盘结构(zeng chao.a kind of chassis structure of agv.)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1