姿态调整装置的制作方法
1.本发明涉及行走装置,具体涉及一种具备姿态自持功能的行走装置。
背景技术:
2.小至玩具、大至汽车,行走装置种类繁多。现有技术中,已有轮式、履带式等多种形式的行走装置出现,部分行走装置设计为自主或半自主运动的机器人,其可以携带一定负载、通过遥控、线控等方式接受指令行走,从而实现在一些复杂、特定环境的应用。例如,在有毒或危险环境下,可以使用机器人携带摄像设备前出进行情况感知,在狭窄空间,可以使用小型机器人进行工作。
技术实现要素:
3.本发明所要解决的技术问题在于提供一种姿态调整装置,能够实现负载的姿态调整。
4.为解决上述技术问题,本发明的技术方案是:一种姿态调整装置,包括支撑板,所述支撑板上沿其长度方向活动设置有主轴,所述主轴的中端固定连接有调姿齿轮;所述支撑板上固定有调姿电机,所述支撑板下方连接有配重;还包括碗形的左侧运动轮毂和右侧运动轮毂,所述的运动轮毂的底面中心设置有轴套,所述左侧运动轮毂和右侧运动轮毂的开放部位互相扣合形成鼓形结构;还包括负载支架,所述负载支架的两端弯折为互相平行的左右两个叉臂,所述左右两个叉臂夹持在左侧运动轮毂和右侧运动轮毂的底面外侧;所述主轴的两端分别与左侧运动轮毂和右侧运动轮毂上的轴套活动连接,所述主轴的两个自由端延伸至轴套以外后分别与左右两个叉臂的末端固定连接。
5.所述支撑板下方连接有与所述鼓形结构的内腔间隙配合的配重腔,所述配重固定在配重腔内。
6.所述的调姿电机固定在支撑板上方。
7.所述的调姿电机布置在支撑板的下方。
8.所述支撑板的中部沿其轴线弯折为截面为弧形的主轴腔,所述主轴腔上沿其长度方向固定设置有两个套环,所述套环内都设置有主轴轴套,所述主轴通过主轴轴套与所述套环活动连接,所述主轴上的调姿齿轮设置在两个套环之间的主轴腔内。
9.本发明可实现姿态调整,即,其上的负载与水平面之间的角度可以在额定范围内主动调整。
附图说明
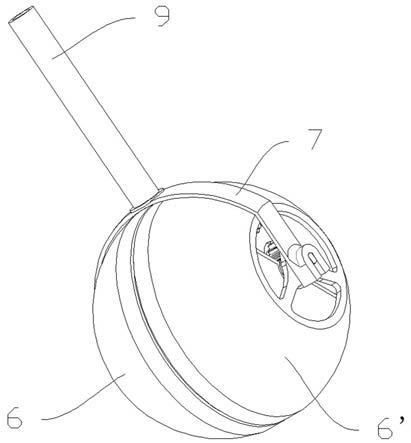
10.图1 是实施例所述的基于球面支撑的姿态自持式行走装置的立体图;图2是实施例所述的基于球面支撑的姿态自持式行走装置的正视图;
图3是图2沿a
‑
a线的剖视图;图4是实施例所述的基于球面支撑的姿态自持式行走装置的侧视图;图5是图4沿b
‑
b线的剖视图;图6是实施例所述的基于球面支撑的姿态自持式行走装置的爆炸视图;图7是图6的正视图;图8是图6的剖视图。
具体实施方式
11.以下实施例提供了一种基于球面支撑的姿态自持式行走装置,本发明请求保护其中的姿态调整装置部分。
12.如图1、图2、图3、图4、图5、图6、图7、图8可见,本实施例的基于球面支撑的姿态自持式行走装置,包括支撑板1,所述支撑板1上沿其长度方向活动设置有主轴2,所述主轴2的中端固定连接有调姿齿轮20;所述支撑板1上固定有左运动电机3、调姿电机4、右运动电机5,所述支撑板1下方连接有配重。
13.还包括碗形的左侧运动轮毂6和右侧运动轮毂6’,所述的运动轮毂的底面中心设置有轴套60,所述左侧运动轮毂6和右侧运动轮毂6’的开放部位互相扣合形成鼓形结构。
14.所述运动轮毂包括一个圆形平面构成的底面,底面边沿一体成型的弯折为碗形结构,其上部敞口;左侧运动轮毂6和右侧运动轮毂6’对称设置、互相扣合形成鼓形结构。所述鼓形结构的鼓身部分外缘为圆弧形结构,用来作为本自持装置与地面接触的支撑部位;鼓身两侧的左右平面互相平行,用于连接负载支架。
15.还包括负载支架7,所述负载支架7的中部设置为与所述鼓形结构匹配的圆弧部70,所述圆弧部的两端弯折为互相平行的左右两个叉臂71,所述左右两个叉臂71夹持在左侧运动轮毂6和右侧运动轮毂6’的底面外侧;所述圆弧部70的中端设置有连接部,用于连接负载9;所述主轴2的两端分别与左侧运动轮毂6和右侧运动轮毂6’上的轴套60活动连接,必要的情况下,主轴2与轴套60之间可以增设轴承以提高灵活性(图中未示出轴承)。所述主轴2的两个自由端延伸至轴套60以外后分别与左右两个叉臂71的末端固定连接;本实施例中,所述主轴2的两个自由端与所述两个叉臂71的末端互相卡接。
16.所述左运动电机3、右运动电机5的动力输出轴分别与所述左侧运动轮毂6、右侧运动轮毂6’传动连接,所述调姿电机4的动力输出轴与所述主轴2上的调姿齿轮20传动连接。
17.所述支撑板1下方连接有与所述鼓形结构的内腔间隙配合的配重腔8,所述配重固定在配重腔8内。
18.本实施例中,为了便于布置,所述的左运动电机3、调姿电机4和右运动电机5都固定在支撑板1上方。需要说明的是,电机也可以充当配重使用,即所述的左运动电机3、调姿电机4、右运动电机5中的至少一个布置在支撑板1的下方,仍然能够实现相应的功能。
19.如图6、图7、图8可见,作为实施方式之一,所述支撑板1的中部沿其轴线弯折为截面为弧形的主轴腔10,所述主轴腔10上沿其长度方向固定设置有两个套环100,所述套环100内都设置有主轴轴套21,所述主轴2通过主轴轴套21与所述套环100活动连接,所述主轴2上的调姿齿轮20设置在两个套环100之间的主轴腔10内。
20.本实施例中,所述配重腔8的底面与所述鼓形结构的内腔匹配、上端面与所述支撑板1的下底面匹配、两侧面分别与所述左侧运动轮毂6和右侧运动轮毂6’的底面匹配,整体类似于切成一半的鼓形结构,达到能与所述左侧运动轮毂6和右侧运动轮毂6’互相不干涉的目的即可。
21.如图6可见,作为传动的实现方式之一,所述左侧运动轮毂6和右侧运动轮毂6’内侧的轴套60上固定有齿轮,所述左运动电机3、右运动电机5的动力输出轴分别通过所述齿轮与所述左侧运动轮毂6和右侧运动轮毂6’传动连接。
22.如图3、图6、图7、图8可见,所述支撑板1的两端都设置有侧立板11,所述两个侧立板11之间设置有前后两根固定杆12,所述的左运动电机3、调姿电机4和右运动电机5上都焊接固定有辅助定位板345,该辅助定位板345上设置有左右两个孔,两根固定杆12分别从两个孔中穿过并以螺母将固定杆12与辅助定位板固定,两根固定杆12的端部再分别与两个侧立板11固定连接。即所述左运动电机3、调姿电机4和右运动电机5通过固定杆12固定在所述支撑板1上,其固定方式不限于以上描述。
23.本实施例的基于球面支撑的姿态自持式行走装置的主要功能特点:一、具备姿态自持功能,并具备一定的负载能力本装置可实现姿态自持,在受到外力干涉时其姿态会改变,但干涉消失后,本装置可以恢复到受干涉以前的姿态;即,本装置具备类似于“不倒翁”的功能。需要说明的是,在承载一定体量负载的前提下,本装置仍然具备以上“不倒翁”功能,从而使其具备广阔的应用场景。
24.实现原理:左侧运动轮毂6和右侧运动轮毂6’的开放部位互相扣合形成鼓形结构,鼓形结构的圆弧部位着地,支撑板1设置在鼓形结构内部,支撑板1下方连接有配重、上方通过负载支架7连接负载9;支撑板1以及配重等部件的重量都通过主轴2传导至左侧运动轮毂6和右侧运动轮毂6’,且主轴2与所述鼓形结构可以相对旋转。
25.由于配重位于支撑板1的下方,且所述配重的重心与所述主轴2配合,即主轴2水平设置,配重的重心线通过主轴2的中心。负载9、负载支架7作为一个整体具备一个合适的体量,使得其重心与配重相平衡,因而可达到姿态自持功能。本装置作为一个整体受外力干涉在一定角度范围内倾转时,配重起到平衡作用,配重越大,平衡能力越强。
26.负载9的重量大小受限于配重的大小。理论上,通过增加配重的重量即可增加本装置的负荷能力。另外,配重腔8也设置在鼓形结构内部,蓄电池乃至电机等配合件均可纳入配重腔8,从而使得必要的配件可以充当配重使用。作为最低要求,固定在支撑板1上方的部件总重量应小于下方配重的重量。
27.二、具备行走功能左运动电机3、右运动电机5的动力输出轴分别与所述左侧运动轮毂6、右侧运动轮毂6’传动连接。分别驱动左运动电机3、右运动电机5即可实现多种形式的运动。
28.当左侧运动轮毂6、右侧运动轮毂6’运动时,主轴2仍然受到配重驱动,与左侧运动轮毂6、右侧运动轮毂6’之间相对转动,因而本装置运动状态下,负载9、负载支架7会发生一定倾转,但不会倾倒,当运动结束后,本装置能恢复原始状态。
29.三、具备姿态调整功能本装置可实现姿态调整,具体而言,是负载支架7可以绕主轴2作一定角度的旋转,
从而使得负载支架7上的外部负载9实现相应的姿态调整。
30.实现方式:调姿电机4工作,经调姿齿轮20驱动主轴2自转,由于负载支架7与主轴2固定连接,即调姿电机4的主轴与负载支架7可相对转动,负载9相应实现姿态调整;随着负载支架7绕主轴2旋转,支撑板1和配重绕主轴2逆向旋转,使得重心仍然平衡。以支撑板1为基准,负载支架7的末端相对于配重具备更大的绝对距离,产生杠杆效应,因此,配重做一个较小角度的旋转即可驱动负载支架7末端做较大范围的姿态调整。
31.另外,本实施例中姿态调整还包括重心调整,即整体重心的升高与降低。装置行走时,重心可配合调整,从而获得更适合的行走速度。
32.需要说明的是,由于配重的重心与主轴2的中点重合,且主轴2与调姿齿轮20同轴,调姿齿轮20自转引起姿态调整,因此,本装置姿态调整过程中,主轴2的两端始终保持等高状态。
33.四、本装置可通过电力驱动,也可通过电池驱动,在配备相应模块后,可接受遥控指挥,应用范围广泛。电池可内置于配重腔以作为配重使用。
34.本实施例的具体实施方式包括但不局限于上述实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员可根据本发明作出各种相应的改变和变形,但仍然落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1