一种抗震型智能化电动摩托车的制作方法
1.本发明涉及一种电动摩托车技术领域,更具体地说,它涉及一种抗震型智能化电动摩托车。
背景技术:
2.电动摩托车是电动车的一种,用电瓶来驱动电机行驶。电力驱动及控制系统由驱动电动机、电源和电动机的调速控制装置等组成。电动摩托车的其它装置基本与内燃机的相同。
3.电动摩托车的组成包括:电力驱动及控制系统、驱动力传动等机械系统、完成既定任务的工作装置等。电力驱动及控制系统是电动车的核心,也是区别于用内燃机驱动车最大不同点。
4.目前,市场上的智能化电动摩托车,它包括包括前轮及后轮;产生用于驱动后轮的行驶动力的电动马达;具有支持转向轴的头管以及从头管向后方延伸的主框架部的车身框架;用于向电动马达供给电力的电池;容纳电池的电池壳体。传统的智能电动摩托车的智能化程度较弱,例如防盗系统等;而且传统的电动摩托车的抗震形成较差,即使采用了多个弹簧的作用,但是以及会形成对车身的损坏,降低了使用寿命。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种抗震效果好,智能化程度高,以及实用性强的抗震型智能化电动摩托车。
6.为实现上述目的,本发明提供了如下技术方案:一种抗震型智能化电动摩托车,包括前轮及后轮;产生用于驱动后轮的行驶动力的电动马达;具有支持转向轴的头管以及从头管向后方延伸的主框架部的车身框架;用于向电动马达供给电力的电池;容纳电池的电池壳体,还包括带物联网手机终端、智能防盗、智能灯光、中置驱动系统、前后直接式胎压报警、gps/ics、abs防抱死系统以及tcs牵引力控制模块,所述智能防盗pke包含低频天线、pke控制器、智能钥匙,胎压传感器,pke控制器与胎压传感器通过高频信号配对连接,当出现胎压异常和轮胎温度过高时,胎压发送信号给pke控制器,pke控制器将信号转换为数字信号通过canbus传输给iot,智能钥匙与pke控制器通过低频和高频信号相连,智能钥匙具备锁定pke控制器的功能,通过智能钥匙上面的按钮能控制pke控制器是否进入休眠。
7.本发明进一步设置为:所述pke控制器具有双电切换功能,当整车电门锁处于off档时,整车由车载小电池对车载电气进行供电,档整车处于on档时,pke将自动切换为动力电池供电。
8.本发明进一步设置为:所述中置驱动系统包含pmsm电机、mcu、传动机构、abs制动系统等;当车辆在低摩擦力的路面行驶时,后轮容易出现打滑,当出现打滑的情况时,abs的传感器将会发送指令给mcu,mcu根据abs提供的打滑信号,控制驱动电机的功率及其扭矩输出,从而降低整车牵引力输出,有效的防止打滑的情况出现。
9.本发明进一步设置为:所述整车通过can bus通讯,各个模块之间有通讯协议,该通讯协议用于控制整车是否启动工作;物联网模块集成vcu、电池管理系统;vcu用于控制整车的仪表、mcu、pke、电池,电池通过物联网给mcu供电,mcu驱动电机。
10.本发明进一步设置为:所述车身框架上设有设置于电机和车身框体之间设有减震机构,该减震机构包括设置于车身框体上的振动板、设置于电机下方的安装板、设置于车身框体上且与车身框体垂直设置的抗压板、设置于安装板上的用于转移作用力的若干缸体结构、设置于振动板和缸体之间的第一传动结构以及设置抗压板和缸体之间的第二传动结构。
11.本发明进一步设置为:所述缸体结构包括设置于直管状的纵向设置的受力缸和横向设置的转化缸以及设置于受力缸和转化缸之间的内缓冲结构。
12.本发明进一步设置为:所述第一传动结构包括与振动板连接的推杆、与推杆连接且置于受力缸内的第一活塞以及设置于受力缸和推杆之间且套于第一活塞的杆体外的第一缓冲弹簧,第二传动结构包括与抗压板连接的顶杆、与顶杆连接且置于转化缸内的第二活塞以及设置于转化缸内壁和第二活塞之间且套于第二活塞的杆体外的第二缓冲弹簧。
13.本发明进一步设置为:所述内缓冲结构包括设置于受力缸和转化缸之间的缓冲缸、设置于缓冲缸内的转轴以及套于转轴外且与转轴转动连接的缓冲轮。
14.本发明进一步设置为:所述缸体结构的数量为4个,且两相邻缸体结构的缸体朝向背离设置。
15.通过采用上述技术方案,有益效果,1、采用结构设置,提高电动摩托车的智能化程度,实现了当出现胎压异常和轮胎温度过高时,胎压发送信号给pke控制器,pke控制器将信号转换为数字信号通过canbus传输给iot,智能钥匙与pke控制器通过低频和高频信号相连,智能钥匙具备锁定pke控制器的功能,通过智能钥匙上面的按钮能控制pke控制器是否进入休眠,pke控制器具有双电切换功能,当整车电门锁处于off档时,整车由车载小电池对车载电气进行供电,档整车处于on档时,pke将自动切换为动力电池供电,中置驱动系统包含pmsm电机、mcu、传动机构、abs制动系统等;当车辆在低摩擦力的路面行驶时,后轮容易出现打滑,当出现打滑的情况时,abs的传感器将会发送指令给mcu,mcu根据abs提供的打滑信号,控制驱动电机的功率及其扭矩输出,从而降低整车牵引力输出,有效的防止打滑的情况出现;2、通过将整车通过can bus通讯,各个模块之间有通讯协议,该通讯协议用于控制整车是否启动工作;物联网模块集成vcu、电池管理系统;vcu用于控制整车的仪表、mcu、pke、电池,电池通过物联网给mcu供电,mcu驱动电机,实现了整车的智能化程度,实用性强,结构简单;3、通过设置的减震机构,减小了振动的产生对车身在纵向上的影响,通过设置于车身框体上的振动板、设置于电机下方的安装板、设置于车身框体上且与车身框体垂直设置的抗压板、设置于安装板上的用于转移作用力的若干缸体结构、设置于振动板和缸体之间的第一传动结构以及设置抗压板和缸体之间的第二传动结构,使得在缸体结构的作用下,对作用力进行转移,将纵向作用力改为了横向作用力,从而实现减小对车身框体的影响;4、并且通过多组相对设置的缸体结构,搭配第一、二传动机构,实现了车身框体的
受力均匀程度,实现了良好的结构稳定性,结构简单,实用性强。
附图说明
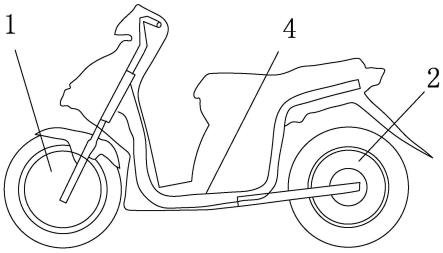
16.图1为本发明一种抗震型智能化电动摩托车实施例的结构示意图。
17.图2为本发明一种抗震型智能化电动摩托车实施例的局部剖视结构示意图。
18.图3为本发明一种抗震型智能化电动摩托车实施例图2中a处结构放大示意图。
19.图中附图标记,1、前轮;2、后轮;3、电动马达;4、车身框架;50、振动板;51、安装板;52、抗压板;6、缸体结构;61、受力缸;62、转化缸; 601、推杆;602、第一活塞;603、第一缓冲弹簧;604、顶杆;605、第二活塞;606、第二缓冲弹簧;7、内缓冲结构;70、缓冲缸;71、转轴;72、缓冲轮。
具体实施方式
20.参照图1至图3对本发明一种抗震型智能化电动摩托车实施例做进一步说明。
21.为了易于说明,实施例中使用了诸如“上”、“下”、“左”、“右”等空间相对术语,用于说明图中示出的一个元件或特征相对于另一个元件或特征的关系。应该理解的是,除了图中示出的方位之外,空间术语意在于包括装置在使用或操作中的不同方位。例如,如果图中的装置被倒置,被叙述为位于其他元件或特征“下”的元件将定位在其他元件或特征“上”。因此,示例性术语“下”可以包含上和下方位两者。装置可以以其他方式定位(旋转90度或位于其他方位),这里所用的空间相对说明可相应地解释。
22.而且,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个与另一个具有相同名称的部件区分开来,而不一定要求或者暗示这些部件之间存在任何这种实际的关系或者顺序。
23.一种抗震型智能化电动摩托车,包括前轮1及后轮2;产生用于驱动后轮2的行驶动力的电动马达3;具有支持转向轴的头管以及从头管向后方延伸的主框架部的车身框架4;用于向电动马达3供给电力的电池;容纳电池的电池壳体,还包括带物联网手机终端、智能防盗、智能灯光、中置驱动系统、前后直接式胎压报警、gps/ics、abs防抱死系统以及tcs牵引力控制模块,所述智能防盗pke包含低频天线、pke控制器、智能钥匙,胎压传感器,pke控制器与胎压传感器通过高频信号配对连接,当出现胎压异常和轮胎温度过高时,胎压发送信号给pke控制器,pke控制器将信号转换为数字信号通过canbus传输给iot,智能钥匙与pke控制器通过低频和高频信号相连,智能钥匙具备锁定pke控制器的功能,通过智能钥匙上面的按钮能控制pke控制器是否进入休眠,采用结构设置,提高电动摩托车的智能化程度,实现了当出现胎压异常和轮胎温度过高时,胎压发送信号给pke控制器,pke控制器将信号转换为数字信号通过canbus传输给iot,智能钥匙与pke控制器通过低频和高频信号相连,智能钥匙具备锁定pke控制器的功能,通过智能钥匙上面的按钮能控制pke控制器是否进入休眠。
24.本发明进一步设置为,pke控制器具有双电切换功能,当整车电门锁处于off档时,整车由车载小电池对车载电气进行供电,档整车处于on档时,pke将自动切换为动力电池供电,中置驱动系统包含pmsm电机、mcu、传动机构、abs制动系统等;当车辆在低摩擦力的路面行驶时,后轮2容易出现打滑,当出现打滑的情况时,abs的传感器将会发送指令给mcu,mcu
根据abs提供的打滑信号,控制驱动电机的功率及其扭矩输出,从而降低整车牵引力输出,有效的防止打滑的情况出现,pke控制器具有双电切换功能,当整车电门锁处于off档时,整车由车载小电池对车载电气进行供电,档整车处于on档时,pke将自动切换为动力电池供电,中置驱动系统包含pmsm电机、mcu、传动机构、abs制动系统等;当车辆在低摩擦力的路面行驶时,后轮2容易出现打滑,当出现打滑的情况时,abs的传感器将会发送指令给mcu,mcu根据abs提供的打滑信号,控制驱动电机的功率及其扭矩输出,从而降低整车牵引力输出,有效的防止打滑的情况出现。
25.本发明进一步设置为,整车通过can bus通讯,各个模块之间有通讯协议,该通讯协议用于控制整车是否启动工作;物联网模块集成vcu、电池管理系统;vcu用于控制整车的仪表、mcu、pke、电池,电池通过物联网给mcu供电,mcu驱动电机,通过将整车通过can bus通讯,各个模块之间有通讯协议,该通讯协议用于控制整车是否启动工作;物联网模块集成vcu、电池管理系统;vcu用于控制整车的仪表、mcu、pke、电池,电池通过物联网给mcu供电,mcu驱动电机,实现了整车的智能化程度,实用性强,结构简单本发明进一步设置为,车身框架4上设有设置于电机和车身框体之间设有减震机构,该减震机构包括设置于车身框体上的振动板50、设置于电机下方的安装板51、设置于车身框体上且与车身框体垂直设置的抗压板52、设置于安装板51上的用于转移作用力的若干缸体结构6、设置于振动板50和缸体之间的第一传动结构以及设置抗压板52和缸体之间的第二传动结构,通过设置的减震机构,减小了振动的产生对车身在纵向上的影响,通过设置于车身框体上的振动板50、设置于电机下方的安装板51、设置于车身框体上且与车身框体垂直设置的抗压板52、设置于安装板51上的用于转移作用力的若干缸体结构6、设置于振动板50和缸体之间的第一传动结构以及设置抗压板52和缸体之间的第二传动结构,使得在缸体结构6的作用下,对作用力进行转移,将纵向作用力改为了横向作用力,从而实现减小对车身框体的影响。
26.本发明进一步设置为,缸体结构6包括设置于直管状的纵向设置的受力缸61和横向设置的转化缸62,采用上述结构设置,通过采用受力缸61配合转化缸62之间的配合,形成了对作用力方向进行转换,并通过设置于受力缸61和转化缸62之间的内缓冲结构7,而内缓冲结构7的设置,实现了对作用力形成缓冲减压,从而增加了良好的受力效果,稳定性强,结构简单。
27.本发明进一步设置为,第一传动结构包括与振动板50连接的推杆 601、与推杆 601连接且置于受力缸61内的第一活塞602以及设置于受力缸61和推杆 601之间且套于第一活塞602的杆体外的第一缓冲弹簧603,第二传动结构包括与抗压板52连接的顶杆604、与顶杆604连接且置于转化缸62内的第二活塞605以及设置于转化缸62内壁和第二活塞605之间且套于第二活塞605的杆体外的第二缓冲弹簧606,采用上述结构设置,第一传动结构和第二传动结构的结构相同,均是采用活塞、以及缓冲弹簧进行配合,结构简单,实用性强,提供了良好的缓冲效果,稳定性强。
28.本发明进一步设置为,内缓冲结构7包括设置于受力缸61和转化缸62之间的缓冲缸70、设置于缓冲缸70内的转轴71以及套于转轴71外且与转轴71转动连接的缓冲轮72,采用上述结构设置,在受力缸61体受力时,油压对缓冲轮72形成冲击,本发明将定向的作用力通过缓冲油缸形成转向的转化,不仅对车体减小了冲击,而且通过缓冲轮72配合转轴71结
构,则减小了对缓冲油缸本身的冲击,增加了使用寿命。
29.本发明进一步设置为,缸体结构6的数量为4个,且两相邻缸体结构6的缸体朝向背离设置,并且通过多组相对设置的缸体结构6,搭配第一、二传动机构,实现了车身框体的受力均匀程度,实现了良好的结构稳定性,结构简单,实用性强。
30.以上所述仅为本发明的较佳实施例,并不用以限制本发明,本领域的技术人员在本发明技术方案范围内进行通常的变化和替换都应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1