自主行驶车辆及其保管设施的制作方法
1.本发明涉及自主行驶车辆及其保管设施,更详细而言涉及具备包括具有利用者乘坐或者搭载货物的上表面的顶板的车辆构造体的自主行驶车辆及其保管设施。
背景技术:
2.在专利文献1中,公开一种提供同乘的车辆。在该车辆上,搭载有用于同乘的乘员与其他乘员按照期望的程度沟通的桌子。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2017-226370号公报
技术实现要素:
6.在为了提供人或者货物的移动服务而利用多台自主行驶车辆的情况下,需要用于保管该多台自主行驶车辆的较宽的空间。针对这样的课题,如果自主行驶车辆自身能够采取能够利用自主行驶功能来削减保管空间的保管形态,则能够在减轻用于保管自主行驶车辆的作业员的劳力的同时削减保管空间。
7.本发明是鉴于如上述的课题而完成的,其目的在于提供一种能够采取如能够利用自主行驶功能来削减保管空间那样的保管形态的自主行驶车辆及其保管设施。
8.本发明所涉及的自主行驶车辆具备车辆构造体、和1个或者多个电子控制单元。车辆构造体包括具有利用者乘坐或者搭载货物的上表面的第1顶板。1个或者多个电子控制单元进行自主行驶车辆的自主行驶控制。1个或者多个电子控制单元在使自主行驶车辆移动到保管设施的保管执行条件成立的情况下,执行作为自主行驶控制的模式之一的保管模式。保管模式包括保管形态形成处理,该保管形态形成处理使自主行驶车辆自主行驶,以使自主行驶车辆与具有与自主行驶车辆相同的结构的1个或者多个其他自主行驶车辆一起在保管设施中采取预定的保管形态。在保管形态下,自主行驶车辆处于重叠状态或者并排状态,该重叠状态是在俯视时自主行驶车辆与1个或者多个其他自主行驶车辆重叠的状态,该并排状态是以与铅直方向平行或者大致平行的方式使第1顶板和1个或者多个其他自主行驶车辆的第2顶板竖立相向并且自主行驶车辆与1个或者多个其他自主行驶车辆排列的状态。
9.车辆构造体也可以包括支撑第1顶板的框架。框架也可以形成为在俯视时车辆前后方向的一端开口、并且随着朝向车辆前后方向的另一端侧而车辆左右方向的宽度变窄。在保管形态形成处理中,1个或者多个电子控制单元也可以使自主行驶车辆自主行驶,以将自主行驶车辆的框架插入到1个或者多个其他自主行驶车辆之一具备的框架的开口。而且,在保管形态下,自主行驶车辆也可以处于上述重叠状态。
10.自主行驶车辆的第1顶板也可以以将设置于另一端侧的旋转轴为中心使一端侧升起的方式旋转自如。
11.自主行驶车辆也可以还具备斜坡,该斜坡形成为从车辆前后方向上的第1顶板的一端延伸,并且引导1个或者多个其他自主行驶车辆之一以开上第1顶板上。而且,在保管形态下,自主行驶车辆也可以通过1个或者多个其他自主行驶车辆之一开上第1顶板上而处于上述重叠状态。
12.1个或者多个其他自主行驶车辆也可以包括斜坡,该斜坡形成为从车辆前后方向上的第2顶板的一端延伸,并且引导自主行驶车辆以开上第2顶板上。在保管形态形成处理中,1个或者多个电子控制单元也可以使自主行驶车辆自主行驶,以使自主行驶车辆利用斜坡开上第2顶板上。而且,在保管形态下,自主行驶车辆也可以通过自主行驶车辆开上第2顶板上而处于上述重叠状态。
13.自主行驶车辆也可以还具备在第1顶板的上表面折叠自如地设置的器具或者装置。而且,第1顶板的上表面也可以包括形成为收纳上述器具或者上述装置的收纳槽。
14.第1顶板也可以包括形成为引导利用斜坡开上第1顶板上的1个或者多个其他自主行驶车辆之一的导引槽。
15.另外,本发明所涉及的保管设施是保管多台上述自主行驶车辆的设施,具备移动式台、保管场所以及支撑体。移动式台包括:爬坡部,供通过保管形态形成处理自主行驶的自主行驶车辆登上;以及降下部,相对爬坡部位于自主行驶车辆的行进方向的前方,使自主行驶车辆降下。而且,移动式台构成为在与行进方向平行的方向上移动自如。在保管场所,从降下部依次降下的多台自主行驶车辆以倒立状态在与行进方向平行的方向上被排列配置。支撑体在保管场所以倒立状态支撑多个自主行驶车辆。多台自主行驶车辆在保管场所以上述重叠状态或者上述并排状态采取保管形态。
16.在本发明所涉及的自主行驶车辆或者其保管设施中,保管执行条件也可以在自主行驶车辆没有任务的情况下成立。
17.在本发明所涉及的自主行驶车辆或者其保管设施中,自主行驶车辆也可以还具备车辆行驶用的电动机、和对电动机供给电力的蓄电装置。而且,保管执行条件也可以在蓄电装置的充电率降低到阈值以下的情况、或者应对蓄电装置进行充电的时间到来的情况下成立。
18.在本发明所涉及的自主行驶车辆或者其保管设施中,保管执行条件也可以在自主行驶车辆的自主行驶功能未受到损坏但在自主行驶车辆中发生故障的情况下成立。
19.根据本发明所涉及的自主行驶车辆,在使自主行驶车辆移动到保管设施的保管执行条件成立的情况下,执行作为自主行驶控制的模式之一的保管模式。保管模式包括保管形态形成处理,该保管形态形成处理使自主行驶车辆自主行驶,以使自主行驶车辆与具有与本发明所涉及的自主行驶车辆相同的结构的1个或者多个其他自主行驶车辆一起在保管设施中采取预定的保管形态。而且,在该保管形态下,自主行驶车辆处于上述重叠状态或者并排状态。这样,根据本发明所涉及的自主行驶车辆,能够采取如能够利用自主行驶功能来削减保管空间那样的保管形态。作为其结果,能够在减轻用于保管自主行驶车辆的作业员的劳力的同时削减保管空间。
20.另外,根据本发明所涉及的自主行驶车辆的保管设施,具备上述移动式台、保管场所以及支撑台,所以通过保管形态形成处理进行了自主行驶的自主行驶车辆能够以倒立状态采取上述保管形态。
附图说明
21.图1是实施方式1所涉及的自主行驶车辆的侧面图。
22.图2是图1所示的自主行驶车辆的俯视图。
23.图3是概略地示出用于控制图1所示的自主行驶车辆的行驶的控制系统的结构的一个例子的框图。
24.图4是概略地示出实施方式1所涉及的运行管理系统的结构的框图。
25.图5是示出多台实施方式1所涉及的自主行驶车辆采取保管形态的状态的侧面图。
26.图6是示出多台实施方式1所涉及的自主行驶车辆采取保管形态的状态的俯视图。
27.图7是示出实施方式1所涉及的与保管模式的执行有关的处理的流程的流程图。
28.图8是用于说明实施方式1所涉及的其他例中的自主行驶车辆的结构的侧面图。
29.图9是实施方式2所涉及的自主行驶车辆的侧面图。
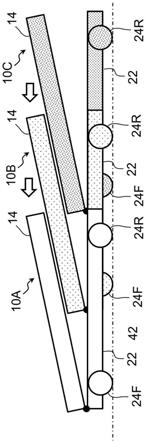
30.图10是用于说明在实施方式2的保管模式中使用的保管形态的侧面图。
31.图11是用于说明实施方式2所涉及的其他例所涉及的自主行驶车辆的结构的侧面图。
32.图12是用于说明图11所示的自主行驶车辆的结构的俯视图。
33.图13是从自主行驶车辆的侧面方向观察实施方式3所涉及的自主行驶车辆以及保管设施的结构的图。
34.图14是图13所示的保管设施的俯视图。
35.图15是从自主行驶车辆的侧面方向观察实施方式3所涉及的其他例中的保管设施的结构的图。
36.(符号说明)
37.10、80、90、110、130:自主行驶车辆;12:电动机;14、92、112、132:顶板;14a、112a:顶板的上表面;16、118:铰链;20:车台部;22、96:框架;22a:框架的开口;24、98:车轮;30:车体部;50:控制系统;52:蓄电装置;56:照相机;58:激光雷达;60:通信装置;64:自主行驶ecu(电子控制单元);66:行驶控制ecu(电子控制单元);70:运行管理系统;72:管理服务器;92:车辆构造体;100、122:斜坡;114:支柱;116:外界传感器;120:收纳槽;124:导引槽;140、160:保管设施;142:移动式台;144:保管场所;146、162:支撑体;148:移动式台的爬坡部;150:移动式台的降下部;152:移动式台的辊;154:地面;156:垫子。
具体实施方式
38.在以下说明的各实施方式中,对在各图中共同的要素附加同一符号而省略或者简化重复的说明。另外,在以下所示的实施方式中言及各要素的个数、数量、量、范围等的数量的情况下,除了特别明示的情况、原理上明确地确定为该数量的情况以外,本发明不限定于该言及的数量。
39.1.实施方式1
40.1-1.自主行驶车辆(用于人移动/物输送)的结构例
41.图1是实施方式1所涉及的自主行驶车辆10的侧面图。图2是图1所示的自主行驶车辆10的俯视图。自主行驶车辆10具备车辆行驶用的电动机12、和对电动机12供给电力的蓄电装置52。
42.自主行驶车辆10在其上部具备顶板14。顶板14具有铅直方向(图1的纸面上下方向)的宽度较窄的长方体形状。顶板14具有利用者乘坐或者搭载货物的上表面(甲板)14a。在利用者乘坐的情况下,上表面14a与乘车面相当。自主行驶车辆10可无人驾驶。自主行驶车辆10能够用于搬运在顶板14上乘车的人或者搭载的货物。这样的自主行驶车辆被用于人移动时的乘车定员没有特别限定,例如是4名。即,自主行驶车辆10是小型车辆(载人车)。
43.更具体而言,自主行驶车辆(以下还简称为“车辆”)10由包括电动机12的车台部20、和包括顶板14的车体部30构成。车体部30由车台部20支撑。此外,在图1、2所示的车辆10的例子中,顶板14和车台部20的框架22的组合与本发明所涉及的“车辆构造体”的一个例子相当。
44.1-1-1.车台部
45.如图2所示,车台部20是与行驶功能有关的构成要素,包括电动机12、框架22以及车轮24。作为一个例子,车轮24是分别左右对称地配置的2个前轮24f和2个后轮24r。电动机12针对合计4个车轮24的各个例如设置于同轴上。此外,车轮24的数量根据车辆10的乘车定员以及要求驱动力等条件而任意地决定,也可以代替4个,而成为例如左右各3个即合计6个。另外,电动机12的数量也可以未必与车轮24的数量相同,也可以根据要求驱动力等条件而变更。
46.在图2中,示出框架22的概略性的形状。框架22具有在车辆10的左右分别在车辆10的前后方向上延伸的主部件26、和连接2根的主部件26之间的子部件28。在车辆10的左侧的主部件26,固定有左侧的2个车轮24以及对它们进行驱动的2个电动机12。同样地,在右侧的主部件26,固定有右侧的2个车轮24以及对它们进行驱动的2个电动机12。顶板14由框架22(更详细而言是主部件26)支撑。
47.如参照图5、6后述,为了能够使多台车辆10在俯视时重叠,车台部20如下所述形成。即,框架22(主部件26)形成为在俯视时车辆前后方向的一端(在图2所示的例子中是车辆后方侧端)开口、并且随着朝向车辆前后方向的另一端(在图2所示的例子中是车辆前方侧端)的一侧而车辆左右方向的宽度变窄。
48.换言之,框架22形成为随着朝向前轮24f侧而变细。更详细而言,左右的主部件26形成为使2个前轮24f的外侧面之间的距离d1比驱动2个后轮24r的2个电动机12之间的距离d2短。而且,子部件28相对能够将其他车辆10x的车台部(参照图2中的虚线)从车辆10的后方侧插入到车台部20的内部的界限位置处的其他车辆10x的前端p1,配置于车辆10的前后方向的前方。
49.通过电动机12的控制,进行车辆10的加速以及减速。另外,例如,能够利用通过电动机12的控制产生的再生制动,进行车辆10的制动。另外,车辆10也可以为了制动,在任意的车轮24中具备机械式刹车。
50.另外,根据具备上述车台部20的车辆10,通过在左侧的2个车轮24的旋转速度与右侧的2个车轮24的旋转速度之间设置差,能够使车辆10左右转弯。另外,在图2所示的例子中,各车轮24是嵌入轮胎的一般的构造的车轮。也可以代替这样的例子,为了提高车辆10的转弯的自由度,例如,通过全方位移动用车轮(所谓万向轮)置换4个车轮24。另外,也可以代替这些例子,为了车辆10的转弯,使用操舵机构。
51.附带地,本实施方式的车辆10是具备车轮24的装轮车辆(wheeled vehicle),但本
发明所涉及的自主行驶车辆不限于此,也可以构成为具有履带等无限轨道的装轨车辆(tracked vehicle)。
52.1-1-2.车体部
53.在图1所示的例子中,车体部30仅具备顶板14作为主要的构成要素。然而,在为了人移动使用车辆10的例子中,车体部30例如也可以在顶板14的上表面14a具备可拆卸的任意的器具(例如扶手)或者装置(例如照相机或者激光雷达)。
54.如参照图5、6后述,为了能够使多台车辆10在俯视时重叠,车体部30(顶板14)如下所述构成。即,顶板14构成为以设置于车辆10的前方侧的端部的铰链16(本发明所涉及的“设置于另一端侧的旋转轴”)为中心相对车台部20旋转自如。其结果,如后述图5所示,顶板14以将铰链16(旋转轴)作为中心使车辆10的后方侧的端部(本发明所涉及的“一端侧”)升起的方式旋转自如。该旋转轴与车辆左右方向平行。作为一个例子,铰链16设置于顶板14与框架22的各主部件26之间。利用铰链16的顶板14的旋转既可以手动地进行,也可以利用电动机等致动器(图示省略)进行。
55.附带地,在图1所示的车辆10的例子中,顶板14处于比车轮24高的位置。因此,与车台部20(框架22)不同,无需为了使多台车辆10在俯视时重叠,越朝向车辆前方侧使顶板14在车辆左右方向的宽度越窄。这提高顶板14的形状的自由度。与这样的例子不同,在具有在侧面时顶板与车轮重叠的构造的例子中,也可以与车台部20同样地,以越朝向车辆前方侧使顶板的车辆左右方向的宽度越窄的方式形成顶板。
56.1-1-3.控制系统
57.图3是概略地示出用于控制图1所示的自主行驶车辆10的行驶的控制系统50的结构的一个例子的框图。控制系统50搭载于自主行驶车辆10。控制系统50具有使车辆10自主行驶的功能。
58.如图3所示,控制系统50具备上述蓄电装置52、惯性测量单元(imu)54、照相机56、激光雷达(lidar:laser imaging detection and ranging,激光成像探测与测距)58、通信装置60、gnss接收机(global navigation satellite system,全球导航卫星系统)62、自主行驶ecu(electronic control unit,电子控制单元)64、行驶控制ecu66、以及马达控制器68。如图2所示,照相机56设置于顶板14的四角的各个角,激光雷达58设置于车辆10的前方侧以及后方侧各自的顶板14的端面。作为一个例子,照相机56以及激光雷达58以外的控制系统50的构成要素52、54、60~68如图1所示,在比图2中的前端p1更前方侧配置于车台部20的内部。
59.蓄电装置52是锂离子电池等二次电池或者蓄电器或者这双方。蓄电装置52对搭载于车辆10的各设备(电动机12以及控制系统50)供给电力。imu54检测3轴的角速度以及加速度。因此,根据imu54,能够取得车辆10的速度(车速)、加速度以及姿势等各种行驶状态。imu54将取得的行驶状态发送给自主行驶ecu64以及行驶控制ecu66。
60.照相机56以及激光雷达58是用于辨识车辆10的周边环境的“外界传感器”的例子。4个照相机56拍摄车辆10的周围(更详细而言是车辆10的右前方、左前方、右后方以及左后方)。2个激光雷达58分别检测车辆10的前方以及后方的物体。根据激光雷达58,能够取得检测物体距车辆10的距离和方向。照相机56以及激光雷达58将取得的信息发送给自主行驶ecu64。此外,也可以代替图3所示的例子,而仅使用照相机56以及激光雷达58中的某一方。
61.通信装置60经由4g或者5g等无线通信网络,与后述管理服务器72(参照图4)的通信装置72c进行通信(发送接收)。另外,通信装置60经由同样的无线通信网络,与后述便携终端40(参照图4)进行通信。gnss接收机62根据来自gnss卫星的信号,取得车辆10的位置以及方位。gnss接收机62将取得的信息发送给自主行驶ecu64。
62.自主行驶ecu64具备处理器64a以及存储装置64b。在存储装置64b中,储存有用于使车辆10自主地行驶的至少1个程序。通过处理器64a读出并执行储存于存储装置64b的程序,实现利用处理器64a的各种处理。另外,在存储装置64b中,储存有地图信息,作为地图数据库。或者,处理器64a也可以从储存于管理服务器72的存储装置72b(参照图4)的地图数据库,取得地图信息。
63.在典型的车辆10的使用例(利用使用管理服务器72的配车服务的人移动的例子)中,将目的地从利用者的便携终端40经由管理服务器72发送给自主行驶ecu64。自主行驶ecu64(处理器64a)根据来自gnss接收机62的车辆10的位置信息和地图数据库的地图信息,设定车辆10的当前地至目的地的目标行驶路径和目标车速。另外,处理器64a根据基于imu54以及gnss接收机62的车辆10的行驶状态信息以及位置信息、和由照相机56以及激光雷达58取得的车辆10的周围的物体的信息,根据需要变更(更新)设定的目标行驶路径以及目标车速。
64.自主行驶ecu64将最新的目标行驶路径以及目标车速发送给行驶控制ecu66。行驶控制ecu66具备处理器66a以及存储装置66b。在存储装置66b中,存储有用于车辆10的自主行驶的各电动机12的控制所需的各种信息。处理器66a生成用于使车辆10行驶以实现目标行驶路径以及目标车速的各电动机12的控制指令值(旋转速度以及旋转方向等指令值)。处理器66a将由imu54取得的表示行驶状态的信息用于生成该控制指令值。
65.行驶控制ecu66对各马达控制器68指令生成的各电动机12的控制指令值。马达控制器68包括控制从蓄电装置52供给给电动机12的电力的驱动电路,针对4个电动机12的各个设置。各马达控制器68依照来自行驶控制ecu66的控制指令值,控制向各电动机12的通电。
66.根据利用上述自主行驶ecu64以及行驶控制ecu66的控制,能够使车辆10朝向目的地自主地行驶。此外,在图3所示的控制系统50的例子中,进行车辆10的自主行驶控制的自主行驶ecu64以及行驶控制ecu66与本发明所涉及的“1个或者多个电子控制单元”的一个例子相当。
67.1-2.用于车辆的运行管理系统的结构例
68.图4是概略地示出实施方式1所涉及的运行管理系统70的结构的框图。如上所述构成的车辆10可用于提供用于人的移动或者货物的输送的各种移动服务。为了提供这样的各种移动服务,运行管理系统70管理多台车辆10的运行。
69.具体而言,运行管理系统70由多台车辆10、便携终端40以及管理服务器72构成。便携终端40是车辆10的利用者所持有的终端,是例如智能手机或者平板pc。便携终端40具备处理器、存储装置以及通信装置。
70.管理服务器72具备处理器72a、存储装置72b以及通信装置72c。在存储装置72b中,储存有用于各种移动服务的至少1个程序,该各种移动服务用于人的移动或者货物的输送。处理器72a读出并执行储存于存储装置72b的程序。由此,实现用于提供各种移动服务的各
种功能。例如,管理服务器72(通信装置72c)经由无线通信网络,与各车辆10的通信装置60以及便携终端40进行通信。另外,管理服务器72管理利用者的信息。进而,管理服务器72进行多台车辆10的运行管理。也可以在利用管理服务器72的多台车辆10的运行管理中,例如,包括在紧急时由操作人员经由管理服务器72进行的车辆10的远程操作。
71.1-3.保管模式
72.自主行驶ecu64构成为在使车辆10移动到预定的保管设施的“保管执行条件”成立的情况下,执行作为自主行驶控制的模式之一的“保管模式”。自主行驶控制的模式的另1个是自主行驶控制的基本的模式(即进行用于基于来自利用者的要求或者来自管理服务器72的指令的向目的地的移动的自主行驶的模式)。关于保管执行条件的具体例,参照图7后述。
73.保管模式包括在保管设施内执行的“保管形态形成处理”。该保管形态形成处理是用于使车辆10自主行驶以使车辆10与具有与车辆10相同的结构(更详细而言,相同的外形以及相同的功能)的1个或者多个其他车辆(例如图2所示的车辆10x)一起,采取接下来的图5、6所示的“保管形态”的处理。
74.图5以及图6分别是示出多台实施方式1所涉及的自主行驶车辆10采取保管形态的状态的侧面图以及俯视图。在图5以及图6中,作为一个例子,示出3台车辆10a、10b以及10c采取本实施方式所涉及的保管形态的情形。
75.如上所述,车辆10的框架22形成为在俯视时车辆前后方向的一端(车辆后方侧端)开口、并且随着朝向车辆前后方向的另一端(车辆前方侧端)侧而车辆左右方向的宽度变窄。而且,车体部30(顶板14)以利用铰链16使车辆10的后方侧的端部升起的方式旋转自如。
76.在例如车辆10结束预定的任务(人移动或者物输送)归还到保管设施之后,如图5所示打开顶板14的状态下,执行保管形态形成处理。在图5所示的例子中,车辆10b以及10c的自主行驶ecu64的各个执行保管形态形成处理。
77.具体而言,比车辆10b以及10c先归还到保管设施的车辆10a在保管设施内的预定的保管场所停止。接着车辆10a归还的车辆10b的自主行驶ecu64执行保管形态形成处理,使车辆10b自主行驶以将车辆10b的框架22插入到车辆10a的框架22的开口22a。更详细而言,在图5所示的例子中,车辆10b通过自主行驶功能前进。其结果,车辆10b以在俯视时(参照图6)与车辆10a重叠的状态(本发明所涉及的“重叠状态”)实现保管形态。
78.同样地,接着车辆10b归还的车辆10c的自主行驶ecu64执行保管形态形成处理,使车辆10c自主行驶以将车辆10c的框架22插入到车辆10b的框架22的开口22a。其结果,车辆10c以在俯视时(参照图6)与车辆10b重叠的状态(重叠状态)实现保管形态。
79.附带地,为了在利用用于采取上述保管形态的保管形态形成处理的自主行驶中,改善利用了基于照相机56的图像辨识的对位的控制,也可以根据需要将ar(augmented reality,增强现实)标志等记号贴附到接受其他车辆10的插入的车辆10的车辆后方侧的端部。这对于接下来的实施方式2也是同样的。
80.此外,在图5、6所示的例子中,针对车辆10b的车辆10a(同样地针对车辆10c的车辆10b)与本发明所涉及的“1个或者多个其他自主行驶车辆之一”的一个例子相当。另外,在说明对象的车辆10与本发明所涉及的“自主行驶车辆”相应的情况下,顶板14与“第1顶板”的一个例子相当。另一方面,在说明对象的车辆10与本发明所涉及的“1个或者多个其他自主行驶车辆”(其他车辆)相应的情况下,顶板14与“第2顶板”的一个例子相当。这对于后述的
实施方式2也是同样的。
81.附带地,也可以在多台车辆10在保管设施内采取上述保管形态时,进行该多台车辆10的蓄电装置52的充电。即,多台车辆10的保管场所也可以是它们的充电场所。
82.1-3-1.与保管模式的执行有关的处理的流程
83.图7是示出实施方式1所涉及的与保管模式的执行有关的处理的流程的流程图。该流程图的处理在车辆10为了执行预定的任务(人移动或者物输送)而处于保管设施外时开始。
84.在图7中,在步骤s100中,自主行驶ecu64(处理器64a)判定预定的保管执行条件是否成立。例如,能够用如下的手法,进行保管执行条件是否成立的判定。
85.首先,在管理服务器72管理各车辆10的任务的例子中,管理服务器72针对没有任务的车辆10发出向保管设施的归还指令。保管执行条件在这样的归还指令被输出时成立。另一方面,在各车辆10自身判断有无任务的例子中,保管执行条件在自主行驶ecu64判断为没有任务时成立。此外,例如,能够根据是否从与预约车辆10的人的会合时间起经过预定时间而未乘车、或者是否预定时间以上没有输送货物的任务,进行某个车辆10是否没有任务的判断。
86.另外,保管执行条件例如也可以在车辆10的蓄电装置52的充电率soc(state of charge,充电状态)降低到预定的阈值以下时、或者应对蓄电装置52进行充电的时间到来时成立。此外,例如,能够根据事先决定的时刻是否到来、或者从保管设施出发起的经过时间(车辆10的行驶时间)是否达到预定时间,进行应对蓄电装置52进行充电的时间是否到来的判断。
87.进而,保管执行条件例如也可以在车辆10的自主行驶功能未受到损坏但探测到在该车辆10中发生某种故障时成立。此处所称的故障例如相当于车辆10与管理服务器72之间的通信异常(换言之车辆10无法接受到来自管理服务器72的任务的事态)。另外,在为了利用者的乘车检测等目的而安装了检测作用于顶板14的重量的重量传感器(图示省略)的例子中,该故障例如相当于该重量传感器呈现异常的输出的事态。此外,例如,在尽管根据照相机(图示省略)的图像辨识到在顶板14上未乘坐利用者但重量传感器仍有输出的情况下,能够判断重量传感器呈现异常的输出。此处所称的照相机是为了拍摄车辆10的乘车空间而搭载于车辆10的照相机或者设置于街道的照相机(基础设施传感器)。
88.在步骤s100中保管执行条件未成立的情况下,自主行驶ecu64结束本次的处理循环。另一方面,在步骤s100中保管执行条件成立的情况下,自主行驶ecu64执行与保管模式有关的步骤s102~s106的处理。
89.在步骤s102中,自主行驶ecu64将保管设施设定为目的地,使车辆10朝向保管设施自主行驶。即,步骤s102的处理也包含于保管模式。在步骤s104中,自主行驶ecu64判定车辆10是否抵达保管设施。其结果,在车辆10抵达保管设施的情况下,处理进入到步骤s106。
90.更详细而言,在顶板14上搭载有器具或者装置的例子中,这样的器具或者装置被作业者拆卸。而且,在人工地进行用于采取保管形态(参照图5)的顶板14的旋转的例子中,在保管设施的作业员使车辆10的顶板14旋转之后,该车辆10的自主行驶ecu64执行步骤s106的处理。另一方面,在具备能够使顶板14旋转的致动器的例子中,保管模式包括控制该致动器将顶板14升起的处理。因此,该车辆10的自主行驶ecu64在执行该处理之后,执行步
骤s106的处理。
91.在步骤s106中,自主行驶ecu64执行保管形态形成处理。具体而言,在处理进入到步骤s106的车辆10成为保管设施内的保管场所中的多台车辆10的列的开头的情况下,自主行驶ecu64使车辆10朝向开头位置自主行驶。另一方面,在并非列的开头的情况下,自主行驶ecu64使车辆10自主行驶以将框架22插入到在该列中排在前面的其他车辆10的框架22的开口22a。
92.1-4.效果
93.根据以上说明的实施方式1所涉及的自主行驶车辆10,在保管执行条件成立的情况下,执行保管模式,自主行驶车辆10为了采取图5、6所示的保管形态而进行自主行驶。在采取该保管形态时,如图5、6所示多台自主行驶车辆10形成在俯视时重叠的状态(重叠状态)。这样,根据本实施方式的自主行驶车辆10,能够采取如能够利用自主行驶功能来削减保管空间那样的保管形态。作为其结果,能够在减轻用于保管自主行驶车辆的作业员的劳力的同时削减保管空间。
94.1-5.实施方式1所涉及的其他例
95.1-5-1.顶板并非旋转自如的例子
96.图8是用于说明实施方式1所涉及的其他例中的自主行驶车辆80的结构的侧面图。该自主行驶车辆80在未具备铰链16这一点与实施方式1所涉及的自主行驶车辆10不同。在该车辆80中,为了能够利用自主行驶功能在俯视时使多台车辆80重叠,在以使车辆80的后方侧的端部升起的方式相对水平方向倾斜的状态下,经由支撑部件82,通过车台部20(框架22)支撑(固定)顶板14。
97.1-5-2.框架以及顶板的其他结构例
98.为了采取与图5、6所示的例子同样的保管形态,自主行驶车辆的框架也可以与上述图2所示的例子相反地,形成为在俯视时车辆前方侧的端(本发明所涉及的“车辆前后方向的一端”的其他例)开口、并且随着朝向车辆后方侧的端(“车辆前后方向的另一端”的其他例)侧而车辆左右方向的宽度变窄。而且,顶板既可以以将设置于车辆后方侧的端侧的旋转轴作为中心使车辆前方侧的端升起的方式旋转自如、或者也可以以使车辆前方侧的端部升起的方式通过框架支撑(固定)。在此基础之上,也可以为了采取保管形态,电子控制单元在保管形态形成处理中使自主行驶车辆后退。
99.2.实施方式2
100.实施方式2主要在保管模式中使用的保管形态、以及用于采取该保管形态的自主行驶车辆的构造中,与上述实施方式1不同。
101.2-1.自主行驶车辆的结构例
102.图9是实施方式2所涉及的自主行驶车辆90的侧面图。该自主行驶车辆90具备车辆构造体92。车辆构造体92由顶板94、和支撑顶板94的框架96构成。车辆构造体92作为整体具有铅直方向(图9的纸面上下方向)的宽度窄的大致长方体形状。顶板94具备利用者乘坐或者搭载货物的上表面(甲板)94a。
103.车辆90的车台部具备6个车轮98(分别左右对称地配置的2个前轮98f、2个中轮98m以及2个后轮98r)。作为一个例子,电动机12设置于6个车轮98的各个。另外,车辆90的俯视图省略,与车辆10不同,车辆90的框架96的主部件与车辆前后方向平行地延伸。此外,顶板
94也可以代替与车台部的框架96独立的例子,而一体地构成框架的上部。另外,采取后述本实施方式的保管形态的自主行驶车辆的车轮的数量不限于6个,例如,也可以与实施方式1同样地是4个。
104.另外,车辆90具备图3所示的控制系统50,具备与车辆10同样的自主行驶功能。进而,通过与图4所示的运行管理系统70同样的运行管理系统,管理车辆90的运行。
105.在此基础之上,本实施方式的车辆90具备形成为从车辆前后方向上的顶板94的一端(在图9所示的例子中车辆后方侧端)延伸的方式形成的斜坡100。斜坡100以使其他车辆开上该车辆90的顶板94上的方式引导。此外,斜坡100既可以与顶板94一体地形成,也可以与顶板94独立。
106.2-2.保管模式(保管形态)
107.图10的(a)以及图10的(b)是用于说明在实施方式2的保管模式中使用的保管形态的侧面图。在图10的(b)中,示出2台车辆90a以及90b采取本实施方式的保管形态的情形。这样,在本实施方式的保管形态下,另一台车辆90b开上某个车辆90a上。在这样的保管形态下,2台车辆90a以及90b在俯视时处于重叠的状态(重叠状态)。
108.更具体而言,车辆90a比车辆90b先抵达保管设施。车辆90a的自主行驶ecu64使车辆90a朝向预定的保管场所自主行驶。接着车辆90a抵达保管设施的车辆90b的自主行驶ecu64执行保管形态形成处理,进行用于利用车辆90a的斜坡100使车辆90b开上车辆90a的顶板94上的自主行驶。在图10的(a)中,示出车辆90b开始开上车辆90a的斜坡100的情形。更详细而言,在图10的(a)所示的例子中,车辆10b通过自主行驶功能前进。
109.此外,与本实施方式的保管模式的执行有关的处理的流程的一个例子与在实施方式1中说明的图7所示的流程图相同,所以在此省略使用流程图的说明。这在后述的实施方式3也是同样的。
110.附带地,也可以为了如图10的(b)所示使另一台车辆90b易于开上车辆90a上,在本实施方式所涉及的保管形态形成处理的执行中,控制电动机12以发挥比在通常的自主行驶控制的执行中使用的规定转矩高的转矩。另外,在具备6个车轮98的车辆90的例子中,为了易于开上其他车辆90上,车辆90也可以具备转向架机构(图示省略)。转向架机构是能够以与车轮轴平行的摇动轴为中心使前轮98f和中轮98m一体地摇动的机构。
111.2-3.效果
112.通过以上说明的实施方式2所涉及的自主行驶车辆90,在保管执行条件成立的情况下,也执行保管模式,车辆90为了采取如图10的(b)所示的保管形态而进行自主行驶。根据图10的(b)所示的保管形态,能够将保管时的多台车辆10的排列方向(图10的(b)的纸面左右方向)的空间,相比于将不具有斜坡100的车辆90简单地一台一台在该排列方向上排列的情况,削减到一半程度。这样,通过本实施方式的自主行驶车辆90,也能够采取如能够利用自主行驶功能来削减保管空间那样的保管形态。
113.另外,在使用本实施方式的保管形态的情况下,也可以事先决定在保管形态下处于下侧的车辆90(在图10的(b)中是车辆90a)和处于上侧的车辆90(在图10的(b)中是车辆90b)。而且,在采用这样的方式的例子中,斜坡100也可以仅形成于处于下侧的车辆90。另外,在顶板94上搭载有可拆卸的器具或者装置的例子中采用该方式时,关于处于上侧的车辆90,能够省略拆卸上述器具或者装置的作业。
114.2-4.实施方式2所涉及的其他例
115.2-4-1.顶板构造的其他例
116.图11是用于说明实施方式2所涉及的其他例中的自主行驶车辆110的结构的侧面图。图12的(a)以及图12的(b)是用于说明图11所示的自主行驶车辆110的结构的俯视图。该自主行驶车辆110在顶板构造中与实施方式2所涉及的自主行驶车辆90不同。
117.具体而言,在车辆110具备的顶板112的上表面112a,安装有通过支柱114支撑的外界传感器116。外界传感器116是例如照相机或者激光雷达。支柱114以设置于支柱114和顶板112的连接部的铰链118为中心旋转自如。通过这样的构造,固定外界传感器116的支柱114可向车辆前方侧折叠。
118.在顶板112的上表面112a,形成有用于收纳固定有外界传感器116的支柱114的收纳槽120。图12的(a)以及图12的(b)分别示出收纳前的状态以及收纳后的状态。通过利用这样的收纳槽120,能够将固定有外界传感器116的支柱114收纳到上表面112a的内侧。
119.车辆110的保管时的支柱114的收纳也可以由作业员人工地进行。另外,也可以具备用于对支柱114进行旋转驱动而折叠的致动器(图示省略)。而且,也可以在保管时,作为与保管形态形成处理一并包含于“保管模式”的处理,执行为了折叠支柱114而驱动致动器的处理。或者,支柱114也可以通过被开上顶板112上的其他车辆110推倒而折叠。此外,也可以代替固定有外界传感器116的支柱114,在顶板112可折叠地安装任意的器具(例如扶手)或者外界传感器116以外的任意的装置。
120.另外,在顶板112的上表面112a以及斜坡122的上表面122a,形成有用于引导开上该顶板112上的其他车辆110的左右的车轮98的2根导引槽124。各导引槽124形成为与车辆前后方向平行地延伸。通过利用这样的导引槽124,能够使开上顶板112上的其他车辆110的对位变得容易。附带地,为了防止折叠的支柱114被其他车辆110压到,收纳槽120形成为比导引槽124更深。此外,这样的导引槽也可以不形成于斜坡122的上表面122a而仅形成于顶板112的上表面112a。
121.附带地,在车辆110的例子中,如图12的(a)所示,各导引槽124的一部分与收纳槽120共用。也可以代替这样的例子,与收纳槽独立地形成导引槽。另外,在顶板的上表面未具备可折叠的支柱114等器具或者装置的例子中,也可以在上表面仅形成导引槽。
122.2-4-2.斜坡的其他结构例
123.为了采取与图10的(b)所示的例子同样的保管形态,也可以与上述图9所示的斜坡100的例子相反地,以从顶板94的车辆前方侧的端(本发明所涉及的“车辆前后方向上的第1顶板的一端”的其他例)延伸的方式形成斜坡。在此基础之上,在开上具有这样形成的斜坡的自主行驶车辆v1的顶板上的一侧的自主行驶车辆v2中,车辆v2的电子控制单元也可以在保管形态形成处理中使车辆v2后退。
124.3.实施方式3
125.实施方式3主要在保管模式中使用的保管形态中与上述实施方式2不同。在本实施方式中,利用保管设施内的设备,实现多台车辆的保管形态。
126.3-1.保管设施的结构例
127.图13是从自主行驶车辆130的侧面方向观察实施方式3所涉及的自主行驶车辆130以及保管设施140的结构的图。图14是图13所示的保管设施140的俯视图。该自主行驶车辆
130除了在顶板132未具备斜坡100的点以外,与实施方式2所涉及的车辆110同样地构成。在图13、14中,例示成为保管对象的3台车辆130a、130b以及130c。
128.保管设施140是保管车辆130a~130c等多台车辆130的设施。保管设施140包括移动式台142、保管场所144、以及支撑体146。
129.移动式台142包括爬坡部148和降下部150。爬坡部148是在保管时通过保管形态形成处理自主行驶的车辆130登上的区间。降下部150是相对爬坡部148位于车辆行进方向(本发明所涉及的“行进方向”)的前方,用于使登上移动式台142上的车辆130从移动式台142降下的部位。在图13中,示出车辆130c登上移动式台142上并且之后降下的情形。此外,在图13所示的例子中,车辆130通过保管形态形成处理前进之后降下。代替这样的例子,车辆130也可以通过保管形态形成处理后退之后降下。这在后述图15所示的例子也是同样的。
130.为了多台车辆130在保管场所144依次采取保管形态,需要以每当降下1台车辆130时从支撑体146离开预定距离的方式,使移动式台142移动。因此,移动式台142构成为在与车辆行进方向平行的方向(在图13、14中纸面左右方向)上移动自如。作为这样的结构的一个例子,移动式台142具备用于使移动式台142在与车辆行进方向平行的方向上移动的多个辊152。
131.保管场所144是从降下部150依次降下的多台车辆130以倒立的状态在与车辆行进方向平行的方向上排列配置的空间。在保管设施140的地面154上,配设有用于缓和在从移动式台142降下时对车辆130作用的冲击的垫子156。
132.垫子156设置为沿着车辆行进方向(换言之保管场所144中的多台车辆130的排列方向)延伸。如图14所示,移动式台142在跨越垫子156的状态下在与车辆行进方向平行的方向上移动自如地配置。此外,用于吸收降下时的冲击的垫子也可以不设置到地面154而安装到车辆130侧(例如车辆前方侧的端部),或者设置到地面154并且安装到车辆130侧(例如车辆前方侧的端部)。例如,能够在执行保管形态形成处理之前,由作业员将垫子安装到车辆130。
133.支撑体146是用于在保管场所144以倒立状态支撑多台车辆130的构造,作为一个例子是保管设施140的壁。更详细而言,此处所称的倒立状态是指,如图13例示的车辆130a以及130b,作为在使车辆前方侧的端部接触到地面(垫子156的上表面)的同时使顶板132竖立的结果,车辆130竖立的状态。
134.各车辆130在保管场所144,采取本实施方式的保管形态。具体而言,在图13所示的例子中,最早抵达保管设施140的车辆130a倚靠到支撑体146。第2个抵达保管设施140的车辆130b隔着车辆130a倚靠到支撑体146。在这样的保管形态下,车辆130a和车辆130b在俯视时处于相互重叠的状态(重叠状态)。
135.然后,第3个抵达保管设施140的车辆130c在从图13所示的状态降下之后,隔着车辆130a以及130b倚靠到支撑体146。其结果,包括车辆130c的3台车辆130a~130c采取保管形态。
136.更详细而言,例如,能够利用能够驱动移动式台142的致动器(图示省略),进行多台车辆130的保管时的移动式台142的移动。或者,移动式台142的移动也可以通过作业员推动移动式台142来进行。在这些例子中,关于移动式台142的位置,每当一台车辆130向保管场所144降下时,以通过致动器或者人力从支撑体146离开预定距离的方式偏移。
137.另外,也可以利用车辆130从移动式台142的降下,自动地进行移动式台142的移动。具体而言,也可以构成为在某个车辆130在支撑体146或者先降下的其他车辆130与移动式台142(降下部150)的间隙降下时,通过降下的车辆130推动移动式台142而移动。
138.附带地,为了各车辆130采取本实施方式的保管形态,事先适合地决定车辆130的重心位置、降下部150的形状、刚要降下之前的车辆130的速度、以及车辆130相对支撑体146的降下位置等各种调整要素。由此,能够在从移动式台142降下后使车辆130适合地倚靠到支撑体146或者先降下的车辆130。
139.3-2.效果
140.通过以上说明的实施方式3所涉及的自主行驶车辆130,在保管执行条件成立的情况下,也执行保管模式,车辆130为了采取如图13所示的保管形态而进行自主行驶。更详细而言,各车辆130通过以在登上移动式台142上后从降下部150向保管场所144降下的方式进行自主行驶,能够采取保管形态。根据图13所示的保管形态,多台车辆130成为倒立状态并且在俯视时相互重叠。因此,能够有效地削减保管时的排列方向(参照图13)的空间。
141.如以上所述,根据本实施方式的自主行驶车辆130,通过利用移动式台142、保管场所144以及支撑体146,通过保管形态形成处理进行自主行驶的车辆130能够以倒立状态采取上述保管形态。其结果,通过本自主行驶车辆130,也能够利用自主行驶功能削减保管空间。
142.另外,根据本实施方式,无需作业员自身将作为重物的自主行驶车辆130靠到支撑体146的作业,并且能够以在俯视时相互重叠的方式将多台车辆130靠到支撑体146。
143.3-3.利用移动式台的保管形态的其他例
144.图15是从自主行驶车辆130的侧面方向观察实施方式3所涉及的其他例中的保管设施160的结构的图。该保管设施160在支撑体的结构中,与实施方式3所涉及的自主行驶车辆130不同。
145.保管设施160具备支撑体162。如图15所示,支撑体162具有上表面开口的长方体形状(换言之时轨道形状)。针对每1台车辆130,设置有支撑体162。而且,为了支撑(夹持)从移动式台142依次降下的各车辆130的前端部(作为一个例子是车辆前方侧的端部),沿着车辆行进方向(多台车辆130的排列方向),排列设置有预定数量的支撑体162。附带地,支撑体162具有与车辆130的车辆左右方向的宽度等同的宽度。
146.根据与移动式台142一起具备上述支撑体162的保管设施160,多台车辆130能够如下所述采取保管形态。即,每当通过依照保管形态形成处理进行自主行驶而车辆130从移动式台142降下时,移动式台142向排列方向的后方侧移动1个支撑体162的宽度量。由此,通过支撑体162,以倒立状态依次支撑(夹持)从移动式台142降下的车辆130。
147.而且,在利用支撑体162得到的倒立状态下,多台车辆130以与铅直方向平行或者大致平行的方式使顶板132竖立相向并且排成一列。更详细而言,多台车辆130以使一方的车辆130(在图15中是车辆130b)的顶板132的上表面与其他车辆130(在图15中是车辆130a)的底面相向的方式排列。在这样的保管形态下,得到本发明所涉及的“并排状态”。在这样的并排状态下,相比于上述其他例子的情况,能够最有效地削减保管时的排列方向的空间。
148.另外,根据保管设施160,通过如图15所示排列设置支撑体162,能够使各车辆130自然而然地对齐排列。
149.此外,支撑体162也可以构成为排列方向的后侧(图15的纸面左侧)的侧面部162a能够向下方(图15的纸面下方向)滑动。由此,能够使从支撑体162取出车辆130的作业变得容易。以同样的目的,支撑体162例如也可以具有能够将侧面部162a向排列方向的后侧(图15的纸面左侧)放倒的构造。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1