一种用于线控转向系统的转向管柱转角传感器故障判断方法
1.本发明涉及线控转向系统技术领域,具体来说是一种用于线控转向系统的转向管柱转角传感器故障判断方法。
背景技术:
2.线控转向系统不同于传统的转向系统,取消了方向盘到转向执行器之间的机械连接,具有较高的设计自由度、更容易与自动驾驶其他子系统进行集成控制、改善主动安全性能、提升操纵稳定性等优点,是智能驾驶汽车安全稳定执行的基础。
3.由于更多的电气系统取代了机械系统,线控转向系统工作的可靠性相应地需要去提升。在不增加硬件冗余成本的情况下,采取软件冗余的方法可以有效利用车上已有的资源,从而可以实现有效的容错控制,而实现容错控制的关键就是要能够实时诊断传感器发生的故障。
4.因此,如何设计出一种能够针对于转向管柱转角传感器故障进行判断的技术已经成为急需解决的技术问题。
技术实现要素:
5.本发明的目的是为了解决现有技术中难以对转角传感器器进行故障判断的缺陷,提供一种用于线控转向系统的转向管柱转角传感器故障判断方法来解决上述问题。
6.为了实现上述目的,本发明的技术方案如下:
7.一种用于线控转向系统的转向管柱转角传感器故障判断方法,包括以下步骤:
8.实时运行数据的获取:获取线控转向系统的实时运行参数数据;
9.转角传感器故障诊断策略的建立:建立基于横摆角速度和侧向加速度的卡尔曼滤波估计的转角传感器故障诊断策略;
10.转向管柱转角传感器故障的判断:根据转角传感器故障诊断策略对转角传感器进行故障判断。
11.所述转角传感器故障诊断策略的建立包括以下步骤:
12.建立车辆二自由度模型,其表达式如下:
[0013][0014]
其中,β为质心侧偏角,kf、kr分别为前、后轴轮胎的总侧偏刚度,u为车辆纵向车速,γ为横摆角速度,δf为前轮转角,a和b分别为质心至前、后轴的距离,iz为车辆绕z轴转动惯量,m为整车质量,和均为数学求导表达式;
[0015]
其横摆角速度稳态响应增益如下:
[0016][0017][0018]
其中,l为轴距,k为稳定性因数,δ为前轮转角;
[0019]
建立转向系统模型,其表达式如下:
[0020][0021]
其中,j
eq
为转向系统等效转动惯量,b
eq
为转向系统等效转动阻尼,k
eq
为转向系统等效转动刚度,ig为转向器的传动比,mz为轮胎受到的回正力矩,t 为转向电机驱动力矩,为数学二阶导表达式,为数学一阶导表达式;
[0022]
根据上述模型公式,建立基于横摆角速度的卡尔曼滤波估计的转角传感器故障诊断策略,其中:
[0023]
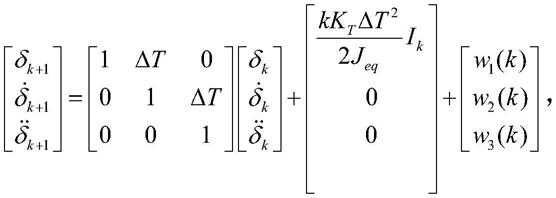
离散状态方程为:
[0024][0025]
观测方程为:
[0026][0027]
其中,δt为控制器运算周期,k
t
为电机的转矩系数,j
eq
为转向系统等效转动惯量,ik为转向执行电机电流,wk为过程噪声,v
1k
为横摆角速度传感器测量噪声,δ
k+1
为k+1时刻转角,δk为k时刻转角,和均为数学求导表达式,k为转向器的传动比,uk为k时刻车辆纵向车速,kk为k时刻稳定性因数,w1(k)、w2(k)、w3(k)为过程噪声;
[0028]
由此得到转角估计值
[0029]
建立基于侧向加速度的卡尔曼滤波估计的转角传感器故障诊断策略,其中:
[0030]
系统的离散状态方程为:
[0031][0032]
观测方程为:
[0033][0034]
其中,v
2k
为侧向加速度测量噪声,a
yk
为k时刻横向加速度,
[0035]
由此得到转角估计值
[0036]
所述转向管柱转角传感器故障的判断包括以下步骤:
[0037]
根据转角估计值和k时刻转向盘转角传感器的测量值得出三组残差分别如下:
[0038][0039]
其中,r1、r2和r3为三组残差的记号;
[0040]
当r
1-z1≤0,故障特征向量s1设置为1,否则为0;
[0041]
当r
2-z2≤0,故障特征向量s2设置为1,否则为0;
[0042]
当r
3-z3≤0,故障特征向量s3设置为1,否则为0;
[0043]
通过判断故障特征向量[s1,s2,s3]来判断传感器是否发生故障;
[0044]
若s=[s1,s2,s3]=[1,1,0],则表示传感器发生了故障,否则表示正常。
[0045]
有益效果
[0046]
本发明的一种用于线控转向系统的转向管柱转角传感器故障判断方法,与现有技术相比通过采集横摆角速度、侧向加速度和转向执行电机电流信号,分别基于侧向加速度和横摆角速度,通过卡尔曼滤波方法对转向管柱转角传感器进行故障实施诊断,为容错控制提供了正确的诊断信息,从而提升了线控转向系统的安全性和可靠性。
附图说明
[0047]
图1为本发明的方法顺序图。
具体实施方式
[0048]
为使对本发明的结构特征及所达成的功效有更进一步的了解与认识,用以较佳的实施例及附图配合详细的说明,说明如下:
[0049]
如图1所示,本发明所述的一种用于线控转向系统的转向管柱转角传感器故障判断方法,包括以下步骤:
[0050]
第一步,实时运行数据的获取:获取线控转向系统的实时运行参数数据。
[0051]
第二步,转角传感器故障诊断策略的建立:建立基于横摆角速度和侧向加速度的卡尔曼滤波估计的转角传感器故障诊断策略。采用该方法仅仅需要车辆现有的横摆角速度和侧向加速度信号,能够实时准确地诊断出转角传感器的故障,为容错控制提供了良好的诊断依据。
[0052]
其具体步骤如下:
[0053]
(1)建立车辆二自由度模型,其表达式如下:
[0054][0055]
其中,β为质心侧偏角,kf、kr分别为前、后轴轮胎的总侧偏刚度,u为车辆纵向车速,γ为横摆角速度,δf为前轮转角,a和b分别为质心至前、后轴的距离,iz为车辆绕z轴转动惯量,m为整车质量,和均为数学求导表达式;
[0056]
其横摆角速度稳态响应增益如下:
[0057][0058][0059]
其中,l为轴距,k为稳定性因数,δ为前轮转角。
[0060]
(2)建立转向系统模型,其表达式如下:
[0061][0062]
其中,j
eq
为转向系统等效转动惯量,b
eq
为转向系统等效转动阻尼,k
eq
为转向系统等效转动刚度,ig为转向器的传动比,mz为轮胎受到的回正力矩,t 为转向电机驱动力矩,为数学二阶导表达式,为数学一阶导表达式。
[0063]
(3)根据上述模型公式,建立基于横摆角速度的卡尔曼滤波估计的转角传感器故障诊断策略,其中:
[0064]
离散状态方程为:
[0065][0066]
观测方程为:
[0067][0068]
其中,δt为控制器运算周期,k
t
为电机的转矩系数,j
eq
为转向系统等效转动惯量,ik为转向执行电机电流,wk为过程噪声,v
1k
为横摆角速度传感器测量噪声,δ
k+1
为k+1时刻转角,δk为k时刻转角,和均为数学求导表达式,k为转向器的传动比,uk为k时刻车辆纵向车速,kk为k时刻稳定性因数,w1(k)、w2(k)、w3(k)为过程噪声;
[0069]
由此得到转角估计值
[0070]
(4)建立基于侧向加速度的卡尔曼滤波估计的转角传感器故障诊断策略,其中:
[0071]
系统的离散状态方程为:
[0072][0073]
观测方程为:
[0074][0075]
其中,v
2k
为侧向加速度测量噪声,a
yk
为k时刻横向加速度,
[0076]
由此得到转角估计值
[0077]
上述步骤(3)、(4)的卡尔曼滤波估计过程:
[0078]
对于离散系统
[0079]
x
k+1
=axk+buk+w(k)
[0080]
zk=hxk+v(k)
[0081]
预测步:
[0082][0083]
p
k|k-1
=ap
k-1at
+w
[0084]
更新步:
[0085]kk
=p
k|k-1hkt
/(hkp
k|k-1hkt
+v)
[0086][0087]
pk=(i-k
khk
)p
k|k-1
[0088]
通过以上步骤即可实时得到系统的估计值
[0089]
第三步,转向管柱转角传感器故障的判断:根据转角传感器故障诊断策略对转角传感器进行故障判断。其具体包括以下步骤:
[0090]
(1)根据转角估计值和k时刻转向盘转角传感器的测量值δk,得出三组残差分别如下:
[0091][0092]
其中,r1、r2和r3为三组残差的记号。
[0093]
(2)当r
1-z1≤0,故障特征向量s1设置为1,否则为0。
[0094]
(3)当r
2-z2≤0,故障特征向量s2设置为1,否则为0。
[0095]
(4)当r
3-z3≤0,故障特征向量s3设置为1,否则为0。
[0096]
(5)通过判断故障特征向量[s1,s2,s3]来判断传感器是否发生故障;
[0097]
若s=[s1,s2,s3]=[1,1,0],则表示传感器发生了故障,否则表示正常。
[0098]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1