一种线控转向系统的制作方法
1.本实用新型属于汽车设备技术领域,尤其涉及一种线控转向系统。
背景技术:
2.在目前汽车的研发中,无人驾驶技术随着汽车行业不断发展而不断进步。但是,目前无人驾驶在转向精度上不够高,在部分时候满足不了实际转向需求,还需要介入人工控制;其次,在一些特殊情况下,人工制动后,由于驾驶员无法转动方向盘或转动方向盘吃力而容易造成意外事故。
3.因此,如何在无人驾驶情景中保证转向高灵敏度,以及制动时驾驶员便捷的操作,是亟待解决的问题。
技术实现要素:
4.为了解决上述至少一项技术问题,本实用新型公开了一种线控转向系统,能够在无人驾驶的情景下,实现转向的高精度控制;并且能够在人工介入的情况下,使驾驶员获得充分的助力,以此确保汽车的在任何行驶环境下的可操控性。本实用新型的具体技术方案如下:
5.一种线控转向系统,包括:
6.管柱;
7.用于感测管柱转动方向和转动角度的角度传感器;
8.用于感测管柱转动方向的扭矩传感器;
9.控制设备;
10.制动设备,所述制动设备与控制设备电性连接;以及
11.用于辅助管柱转动的驱动设备,所述驱动设备与控制设备电性连接。
12.当汽车由无人驾驶时,控制设备在需要车辆转向的情景下,使驱动设备运动,从而使管柱转动,以此实现车辆转向;在该过程中,角度传感器时刻监测管柱的转动方向和转动角度,以反馈给控制设备,从而确保控制设备计算的转向角度和方向落实于管柱,由此确保无人驾驶时车辆的转向高精确性;此外,当人工制动介入后,控制设备获得制动设备输出的制动信号,角度传感器失效,通过扭矩传感器获取管柱的转动方向,从而使控制设备依据该方向使驱动设备运行,从而实现对驾驶员的助力,由此,避免驾驶员在制动时,无法转动方向盘或转动方向盘吃力而造成的意外事故。
13.优选的,所述驱动设备通过减速机构与管柱连接。
14.所述减速机构具有一点的传动比,由此使得驱动设备更好的实现对管柱的合理助力;对于各类型号的减速机构均能实现良好的助力效果。
15.优选的,所述管柱外设有壳体;所述驱动设备的固定端与壳体连接。
16.在本实用新型中,壳体的设置能够很好的固定驱动设备,从而使驱动设备更直接的对管柱助力转动。
17.优选的,所述扭矩传感器套设于管柱。
18.将扭矩传感器套设于管柱,能够使之更容易的获取管柱的转动方向。
19.优选的,所述管柱套设有第一同步轮;所述角度传感器设置于管柱的一侧,所述角度传感器套设有第二同步轮;所述第一同步轮和第二同步轮通过皮带连接。
20.将角度传感器设置于管柱的一侧,使得管柱结构不臃肿;此外,在同步轮结构中,其具有一定的传动比,经换算后,可以得到准确的转动角度。
21.优选的,所述第一同步轮、第二同步轮、皮带、角度传感器、减速机构和扭矩传感器均设置于壳体内。
22.将上述部件设置于壳体内,能够很好的对其进行保护,避免灰尘污染或油渍污染,从而增加上述部件的使用寿命。
23.优选的,所述驱动设备为可实现正反转的伺服电机。
24.相对于一般电机而言,所述伺服电机具有更好的转向控制精度。
25.优选的,所述控制设备为ecu(electronic control unit,电子控制单元)。
26.ecu是汽车控制系统的核心,是一个微型计算机,内有集成电路及其他精密的电子元件,通过其功能,能够很好的实现信号之间的处理和传递,从而满足本实用新型的具体效果。
27.和现有技术相比,本实用新型能够实现汽车在无人驾驶的情况下的高精度转向,为车辆提供安全的行驶环境;当控制设备接收到制动信号后,扭矩传感器有效,角度传感器失效,此时使得驾驶员在制动时,能够较为轻松的实现汽车转向,很好的降低了事故隐患;此外,本实用新型通过壳体的设置,很好的实现了防尘、防污渍,从而相应的提高了本实用新型的使用寿命。
附图说明
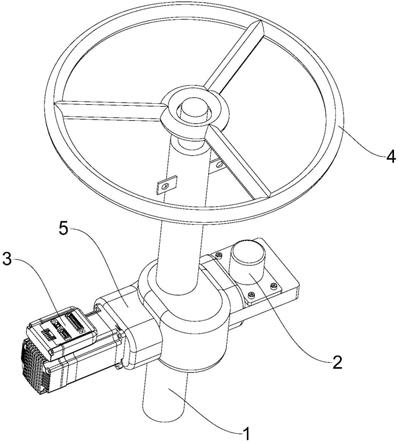
28.图1为本实用新型实施例的结构示意图;
29.图2为本实用新型实施例的系统框图。
30.图中:1
‑
管柱;2
‑
角度传感器;3
‑
驱动设备;4
‑
方向盘;5
‑
壳体。
具体实施方式
31.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合具体实施方式对本实用新型作进一步的详细说明。
32.如图1所示,一种线控转向系统,包括管柱1、角度传感器2、扭矩传感器、控制设备、制动设备和驱动设备3;所角度传感器2用于感测管柱1转动方向和转动角度;所述扭矩传感器用于感测管柱1转动方向;所述制动设备与控制设备电性连接;所述驱动设备3用于辅助管柱1转动,所述驱动设备3与控制设备电性连接。
33.在本实施例中,所述管柱1的一端连接方向盘4,另一端连接连杆机构,所述连杆机构用于控制汽车转向。当汽车处于无人驾驶状态时,由控制设备控制驱动设备3运行,从而实现管柱1的转动,在该过程中,角度传感器2获取转向方向和转向角度,并反馈至控制设备,由控制设备获取准确的转向方向和转向角度,从而实现无人驾驶的高精度转向。当驾驶员制动操作后,控制设备切断与角度传感器2之间的联系,并接入扭矩传感器,此时,控制设
备通过扭矩传感器的信息而判断人为控制的管柱1转向,从而以该转向为准,控制驱动设备运行,因此实现在该方向上,助力驾驶员转向,由此确保制动状态下,汽车转向的快捷性。
34.为了更好的使用本实施例,所述驱动设备3通过减速机构与管柱1连接所述管柱1外设有壳体5;所述驱动设备3的固定端与壳体5连接;所述减速机构设置于壳体5内。
35.在本实施例中,驱动设备3通过壳体5固定,由此在小区域内保证驱动设备3的连接稳定性,由此也将减速机构设置与壳体5内,从而确保减速机构受到保护。
36.为了更好的使用本实施例,所述扭矩传感器套设于管柱1;所述管柱1套设有第一同步轮;所述角度传感器2设置于管柱1的一侧,所述角度传感器2套设有第二同步轮;所述第一同步轮和第二同步轮通过皮带连接;所述第一同步轮、第二同步轮、皮带、角度传感器2、减速机构和扭矩传感器均设置于壳体5内。
37.由于本实施例设置了壳体5,因此,在壳体5所在区域内,除了将减速机构设置于壳体5内以外,所述第一同步轮、第二同步轮、皮带、角度传感器2和扭矩传感器也设置于壳体5内,由此避免利用管柱1过多的区域进行相应连接,由此满足小区域改造的需求;在本实施例中,所述驱动设备3和角度传感器2分别位于管柱1的两侧,由此很好的利用了壳体5进行相应的固定设置,而角度传感器2也能够通过同步带和两个同步带实现稳定的角度感测。
38.需要说明的是,在实际中,本实施例所在区域,预留空间本就相应较小,因此应道考虑如何合理利用已有空间进行可靠改造,由此,将角度传感器2和管柱1进行间接连接,从而使得管柱1的实际改造不会臃肿,从而有效的利用小区域。
39.为了更好的使用本实施例,所述驱动设备3为可实现正反转的伺服电机。
40.为了更好的使用本实施例,所述控制设备为ecu(electronic control unit,电子控制单元)。
41.在本实施例中,所述控制设备中的控制设备中的微处理器为(soc)r
‑
car m3,其具有运算与控制的功能,在汽车启动后,通过采集各传感器的信号,进行运算,并将运算的结果转变为控制信号,从而控制被控对象的工作。
42.如图2所示,本实施例使用时,当汽车处于无人驾驶状态时,控制设备对驱动设备3输出驱动指令,使其控制管柱1转动,经角度传感器2感测的管柱1转动方向和转动角度,为驱动设备3提供判断转向准确度提供数据分析支撑;令管柱1右转使驱动设备3正转,因此,当方向盘4右转时,角度传感器获取右转方向,使伺服电机右转,由于自动驾驶时,控制设备会通过获取车身周围的传感器反馈数据,以计算转向角度,因此角度传感器获取管柱1转动角度后,反馈至控制设备,经控制设备判断,是否准确,若不准确,即使调整;同理于当方向盘4左转时的情况。当制动设备给予控制设备信号后,所述角度传感器2失效,扭矩传感器生效,此时,只需要扭矩传感器获取管柱1的转动方向,并将该信息反馈于控制设备,控制设备基于该方向使驱动设备3驱动管柱1转动,从而实现该方向上的助力。
43.以上仅是本实用新型的优选实施方式,应当指出的是,上述优选实施方式不应视为对本实用新型的限制,本实用新型的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本实用新型的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1