一种教学用四足仿生机器人
1.本实用新型涉及机器人技术领域,尤其是涉及一种教学用四足仿生机器人。
背景技术:
2.随着时代的发展,现在社会对于高科技人才的需求量日益增加,很多中小学生已经开始接触单片机、传感器等。但是,单纯的单片机、传感器过于枯燥,难以激发学生的学习兴趣。在大学期间,学生都会进行课程设计,有些学校开设模电课程设计、单片机课程设计等,但往往将模电课程设计和单片机课程设计分开进行。模电课程设计选择制作收音机,单片机课程设计选择设计数字温度计或交通灯,并未将单片机和模电课程设计结合。随着科技的进步,收音机已经属于时代的淘汰品,且收音机可开发性低,不能给予学生充足的发展空间。同时单片机课程设计与模电课程设计分开,导致学生对于两者的结合应用较差。
3.机器人包括感测技术、控制技术、机械结构和通信知识等,机器人教学是一种十分典型的数字化益智玩具,能够以不同角度、通过多样的形式发挥其教学功能,达到寓教于乐的目的。教学中引入机器人,是培养科技人才的优质平台载体,能够提高学生的科技意识和创新精神,对科技教育起着至关重要的作用。
4.国内关于机器人结构方面的课程迅速增加,为了满足教学需求,往往购买价格昂贵的成品工业机器人,学生的参与度较低,教学中不能将前期设计和后期观摩结合。单纯的学习机器人相关的理论知识较为抽象乏味,并不能满足学生对于深入的了解机器人的本体结构、电学控制等方面知识的教学需要,对于科研教学的演示教育方面的适应性较低,且缺乏变化,难以激发学生对于机器人的学习兴趣,在增加学生对于机器人的认知程度、课堂教学的直观性、调动学生的认知积极性等方面的需求都无法满足。
技术实现要素:
5.本实用新型的目的在于克服上述现有技术中的不足,提供一种教学用四足仿生机器人,其能够提高学生的参与度,增加学生对于机器人的认知程度、课堂教学的直观性,调动学生的认知积极性。
6.为实现上述目的,本实用新型采用的技术方案是:一种教学用四足仿生机器人,其特征在于,包括躯干、前腿、后腿、摄像模块和控制电路板,所述前腿与后腿对称设置在躯干的前后两端,所述前腿与后腿的数量均为两个且两个前腿之间、两个后腿之间的夹角均为90
°
;所述前腿与后腿的结构相同且均包括第二数字舵机、第三数字舵机、第一u型架和第二u型架,所述第二数字舵机的输出轴与躯干固定连接,所述第三数字舵机的输出轴固定设置在第二u型架的u形槽内,所述第二数字舵机的输出轴与第三数字舵机的输出轴相平行,所述第二数字舵机远离输出轴的一端和第三数字舵机远离输出轴的一端均固定设置在第一u型架的u形槽内;所述躯干包括圆盘结构、四个第一数字舵机和四个连接架,其中两个所述连接架分别对应两个前腿,另外两个所述连接架分别对应两个后腿,四个所述第一数字舵机分别与四个连接架一一对应且四个第一数字舵机均与圆盘结构固定连接,每个所述第一
数字舵机的输出轴均与所述圆盘结构的中轴线相平行且每个第一数字舵机的输出轴均与对应连接架的一端固定连接,每个所述第二数字舵机的输出轴均与连接架的另一端固定连接且第二数字舵机的输出轴与第一数字舵机的输出轴相垂直;所述摄像模块固定设置在所述圆盘结构的上方前端用于拍摄路况并对拍摄到的路况信息进行处理,所述控制电路板与圆盘结构平行设置且控制电路板固定设置在圆盘结构的上方用于控制躯干、前腿和后腿动作;所述第一数字舵机、第二数字舵机和第三数字舵机的型号相同且均为双轴数字舵机。
7.上述的一种教学用四足仿生机器人,其特征在于,所述圆盘结构包括上圆盘和下圆盘,所述上圆盘位于下圆盘的上部且上圆盘与下圆盘同轴设置,所述第一数字舵机远离输出轴的一端固定在上圆盘与下圆盘之间。
8.上述的一种教学用四足仿生机器人,其特征在于,所述前腿还包括两个前爪,两个所述前爪分别固定设置在两个前腿的第二u型架的底部;所述后腿还包括两个后爪,两个所述后爪分别固定设置在两个后腿的第二u型架的底部。
9.上述的一种教学用四足仿生机器人,其特征在于,所述控制电路板包括开关模块、电源模块、指示灯、舵机控制模块、时钟模块和微处理器,所述开关模块与电源模块连接用于控制机器人电路的通断,所述电源模块与微处理器连接且为机器人各用电单元供电,所述指示灯与微处理器连接用于接收微处理器输出的指示信号;所述第一数字舵机、第二数字舵机和第三数字舵机均与舵机控制模块连接用于接收舵机控制模块输入的动作信号,所述舵机控制模块与微处理器连接用于接收微处理器输出的控制信号,所述微处理器与时钟模块连接用于接收时钟模块输入的时间信号,所述摄像模块与微处理器连接用于向微处理器输入所拍摄到的图像信号。
10.上述的一种教学用四足仿生机器人,其特征在于,所述控制电路板通过铜柱固定设置在上圆盘的上方,所述铜柱的上端与控制电路板固定连接,所述铜柱的下端与上圆盘固定连接;所述摄像模块通过支撑轴固定设置在两个前腿之间的中部上方,所述支撑轴的上端与摄像模块的后端固定连接,所述支撑轴的下端与上圆盘固定连接。
11.上述的一种教学用四足仿生机器人,其特征在于,所述第一数字舵机通过螺钉固定在上圆盘与下圆盘之间,所述第二数字舵机和第三数字舵机均通过螺钉与第一u型架固定连接。
12.上述的一种教学用四足仿生机器人,其特征在于,所述摄像模块的前端底部设置有与摄像模块相配合的wifi扩展板,所述wifi扩展板与摄像模块通过排针排母连接用于为摄像模块提供互联网通道。
13.上述的一种教学用四足仿生机器人,其特征在于,所述微处理器为stc89c52微处理器,所述电源模块采用ams1117
‑
5.0v电源,所述摄像模块为open mv4 h7摄像头,所述第一数字舵机、第二数字舵机和第三数字舵机均为ldx
‑
227双轴数字舵机。
14.上述的一种教学用四足仿生机器人,其特征在于,所述电源模块包括开关sw2、电源v1、电源v2和电阻r3,所述开关sw2的一端通过接线端子与系统各用电单元连接,所述开关sw2的另一端与电源v1的输入端和电源v2的输入端均连接,该端同时连接有电容c10的一端、电容c11的一端、电容c14的一端和电容c15的一端,所述电源v1的输出端连接有电容c12的一端、电容c13的一端和电阻r3的一端,所述电容c10的另一端、电容c11的另一端、电源v1的接地端、电容c12的另一端均与电容c13的另一端连接且共同接地,所述电阻r3的另一端
连接有显示灯led3的一端,所述显示灯led3的另一端接地;所述电源v2的输出端连接有电容c16的一端和电容c17的一端,所述电容c14的另一端、电容c15的另一端、电源v2的接地端、电容c16的另一端均与电容c17的另一端连接且共同接地;所述电源v1的输出端还与除摄像模块外的各用电单元连接且为除摄像模块外的各用电单元供电,所述电源v2的输出端还与摄像模块连接且为摄像模块供电;
15.所述微处理器包括第1至第40引脚,其中所述微处理器的第20引脚接地,所述微处理器的第40引脚连接电源v1的输出端;
16.所述摄像模块包括第1至第4引脚,所述摄像模块的第3引脚与微处理器的第10引脚连接,所述摄像模块的第2引脚与微处理器的第11引脚连接,所述摄像模块的第1引脚接地,所述摄像模块的第4引脚连接电源v2的输出端;
17.所述指示灯包括电阻r1、电阻r2、指示灯led1和指示灯led2,所述电阻r1的一端与微处理器的第12引脚连接,所述电阻r1的另一端与指示灯led1的一端连接,所述电阻r2的一端与微处理器的第14引脚连接,所述电阻r2的另一端与指示灯led2的一端连接,所述指示灯led1的另一端与指示灯led2的另一端连接且共同接地;
18.所述开关模块包括按钮sw1、有极电容c3和电阻r4,所述有极电容c3的阳极连接电源v1的输出端且该端同时连接按钮sw1的一端,所述有极电容c3的阴极、按钮sw1的另一端均与电阻r4的一端连接,且所述有极电容c3的阴极、按钮sw1的另一端和电阻r4的一端均与微处理器的第9引脚连接,所述电阻r4的另一端接地;
19.所述舵机控制模块的数量为两个,且两个所述舵机控制模块均包括第1至第8引脚,每个所述舵机控制模块的第1至第8引脚均与地、电源v1的输出端和微处理器连接,其中一个所述舵机控制模块的第1至第8引脚分别连接微处理器的第32至第39引脚,另一个所述舵机控制模块的第1至第8引脚分别连接微处理器的第1至第8引脚;
20.每个所述ldx
‑
227双轴数字舵机的电源接口均通过舵机控制模块与电源v1的输出端连接,每个所述ldx
‑
227双轴数字舵机的接地接口均通过舵机控制模块接地,每个所述ldx
‑
227双轴数字舵机的信号接收接口均通过舵机控制模块与微处理器连接用于接收动作信号;
21.所述时钟模块包括电容c0、电容c1和12m晶振,所述电容c0的一端与电容c1的一端连接且共同接地,所述电容c0的另一端分别连接12m晶振的一端和微处理器的第19引脚,所述电容c1的另一端分别连接12m晶振的另一端和微处理器的第18引脚。
22.本实用新型与现有技术相比具有以下优点:
23.1、本实用新型以微处理器为核心控制单元,通过摄像模块和wifi扩展板识别并反馈道路信息,微处理器同时控制型号相同的四个第一数字舵机、四个第二数字舵机和四个第三数字舵机实现机器人的运动角度、方向及转速,动作灵活、驱动方便。
24.2、本实用新型控制电路板包括显示机器人运动方向的指示灯,可以较好的反映出微处理器是否能对摄像模块采集到的道路信息进行及时正确的处理。
25.3、本实用新型中第一数字舵机通过螺钉固定设置在上圆盘与下圆盘之间,第二数字舵机和第三数字舵机均通过螺钉与第一u型架固定连接;通过螺钉的连接方式,不需使用破坏性方式即可将本实用新型进行拆卸,同时便于更换零部件,增强学生的动手能力,零部件可重复安装拆卸,供不同学生学习。
26.下面通过附图和实施例,对本实用新型做进一步的详细描述。
附图说明
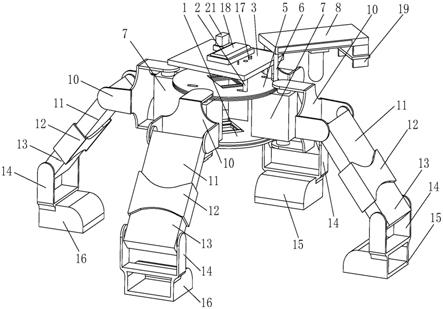
27.图1为本实用新型的结构示意图。
28.图2为本实用新型的俯视图。
29.图3为本实用新型的电路控制框图。
30.图4为本实用新型微处理器的电路图。
31.图5为本实用新型电源模块的电路图。
32.图6为本实用新型的微处理器串口调试工具接线图。
33.图7为本实用新型的摄像模块接线图。
34.图8为本实用新型指示灯的电路图。
35.图9为本实用新型时钟模块的电路图。
36.图10为本实用新型开关模块的电路图。
37.图11为本实用新型舵机控制模块的电路图。
38.附图标记说明:
39.1—下圆盘;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—铜柱;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3—控制电路板;
40.4—电源模块;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5—上圆盘;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6—支撑轴;
41.7—第一数字舵机;
ꢀꢀꢀꢀꢀ
8—摄像模块;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9—时钟模块;
42.10—连接架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11—第二数字舵机;
ꢀꢀꢀꢀ
12—第一u型架;
43.13—第三数字舵机;
ꢀꢀꢀꢀ
14—第二u型架;
ꢀꢀꢀꢀꢀꢀꢀ
15—前爪;
44.16—后爪;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17—指示灯;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18—微处理器;
45.19—wifi扩展板;
ꢀꢀꢀꢀ
20—舵机控制模块;
ꢀꢀꢀ
21—开关模块。
具体实施方式
46.如图1和图2所示,本实用新型包括躯干、前腿、后腿、摄像模块8和控制电路板3,所述前腿与后腿对称设置在躯干的前后两端,所述前腿与后腿的数量均为两个且两个前腿之间、两个后腿之间的夹角均为90
°
;所述前腿与后腿的结构相同且均包括第二数字舵机11、第三数字舵机13、第一u型架12和第二u型架14,所述第二数字舵机11的输出轴与躯干固定连接,所述第三数字舵机13的输出轴固定设置在第二u型架14的u形槽内,所述第二数字舵机11的输出轴与第三数字舵机13的输出轴相平行,所述第二数字舵机11远离输出轴的一端和第三数字舵机13远离输出轴的一端均固定设置在第一u型架12的u形槽内;所述躯干包括圆盘结构、四个第一数字舵机7和四个连接架10,其中两个所述连接架10分别对应两个前腿,另外两个所述连接架10分别对应两个后腿,四个所述第一数字舵机7分别与四个连接架10一一对应且四个第一数字舵机7均与圆盘结构固定连接,每个所述第一数字舵机7的输出轴均与所述圆盘结构的中轴线相平行且每个第一数字舵机7的输出轴均与对应连接架10的一端固定连接,每个所述第二数字舵机11的输出轴均与连接架10的另一端固定连接且第二数字舵机11的输出轴与第一数字舵机7的输出轴相垂直;所述摄像模块8固定设置在所述圆盘结构的上方前端用于拍摄路况并对拍摄到的路况信息进行处理,所述控制电路板3与圆盘结构平行设置且控制电路板3固定设置在圆盘结构的上方用于控制躯干、前腿和后腿动
作;所述第一数字舵机7、第二数字舵机11和第三数字舵机13的型号相同且均为双轴数字舵机。
47.摄像模块8作为机器人的眼睛,设置在两个前腿的中间上方便于观察路况。两个前腿之间和两个后腿之间的夹角均为90
°
,相邻的前腿与后腿之间的夹角均为90
°
。前腿和后腿结构相同,使用零部件种类数量较少,便于学生观摩学习,易于学生动手操作安装,便于更换。本实用新型能够多次拆装,学生参与机械结构拆装,增强学生的动手能力,能够使学生深入的了解机器人的本体结构。
48.如图1所示,圆盘结构包括上圆盘5和下圆盘1,所述上圆盘5位于下圆盘1的上部且上圆盘5与下圆盘1同轴设置,所述第一数字舵机7远离输出轴的一端固定在上圆盘5与下圆盘1之间。
49.本实用新型中,第一数字舵机7通过螺钉固定设置在上圆盘5与下圆盘1之间,第二数字舵机11的输出轴上固定连接有联轴器,联轴器通过螺钉与连接架10固定连接。第二数字舵机11和第三数字舵机13均通过螺钉与第一u型架12固定连接。通过螺钉的连接方式,不需使用破坏性方式即可将本实用新型进行拆卸,同时便于更换零部件,增强学生的动手能力,零部件可重复安装拆卸。
50.如图1和图2所示,前腿还包括两个前爪15,两个所述前爪15分别固定设置在两个前腿的第二u型架14的底部;所述后腿还包括两个后爪16,两个所述后爪16分别固定设置在两个后腿的第二u型架14的底部。
51.机器人的两个前爪15与两个后爪16的底面均是方形平面,两个前爪15与两个后爪16的底面尺寸均不大于40mmx40mm。
52.为了增大机器人前爪15和后爪16与地面的接触面积,以此达到降低机器人重心、增强机器人稳定性的目的,将前爪15和后爪16的底面尺寸设计为要求的最大值。在实际调试过程中,发现机器人易向后倾倒,为了解决这一技术问题,将前爪15高度降低至后爪16高度的一半,以此稳定重心。前爪15和后爪16的边角具有棱角,会造成受力不均匀,从而导致机器人脚易磨损,因此将易损坏边角的厚度加大。
53.如图1、图2和图3所示,控制电路板3包括开关模块21、电源模块4、指示灯17、舵机控制模块20、时钟模块9和微处理器18,所述开关模块21与电源模块4连接用于控制机器人电路的通断,所述电源模块4与微处理器18连接且为机器人各用电单元供电,所述指示灯17与微处理器18连接用于接收微处理器18输出的指示信号;所述第一数字舵机7、第二数字舵机11和第三数字舵机13均与舵机控制模块20连接用于接收舵机控制模块20输入的动作信号,所述舵机控制模块20与微处理器18连接用于接收微处理器18输出的控制信号,所述微处理器18与时钟模块9连接用于接收时钟模块9输入的时间信号,所述摄像模块8与微处理器18连接用于向微处理器18输入所拍摄到的图像信号。
54.如图1所示,控制电路板3通过铜柱2固定设置在上圆盘5的上方,所述铜柱2的上端与控制电路板3固定连接,所述铜柱2的下端与上圆盘5固定连接;所述摄像模块8通过支撑轴6固定设置在两个前腿之间的中部上方,所述支撑轴6的上端与摄像模块8的后端固定连接,所述支撑轴6的下端与上圆盘5固定连接。
55.如图1所示,摄像模块8的前端底部设置有与摄像模块8相配合的wifi扩展板19,所述wifi扩展板19与摄像模块8通过排针排母连接用于为摄像模块8提供互联网通道。
56.摄像模块8采用星瞳科技的open mv4 h7摄像头,而wifi扩展板19是open mv4 h7摄像头专用wifi模块,视频传输速率高达48mbps。wifi扩展板19与摄像模块8相配套,插上写入程序即可使用。wifi扩展板19使得摄像模块8与互联网连接,摄像模块8变成一个网络摄像机。通过wifi扩展板19可以传输压缩图像至浏览器。在移动终端连接到相应热点后,在指定的浏览器地址便可以查看摄像模块8此时所探测到的图像,实现无线传图,可以实时监测机器人周围的环境。移动通讯终端为手机或其它可进行移动通讯的设备。
57.本实用新型中,微处理器18为stc89c52微处理器,所述电源模块4采用ams1117
‑
5.0v电源,所述摄像模块8为open mv4 h7摄像头,所述第一数字舵机7、第二数字舵机11和第三数字舵机13均为ldx
‑
227双轴数字舵机。
58.电源模块4采用ams1117
‑
5.0v芯片为机器人各用电单元提供大电流和较小波纹的电源电压。
59.如图5和图7所示,电源模块4包括开关sw2、电源v1、电源v2和电阻r3,所述开关sw2的一端通过接线端子与系统各用电单元连接,所述开关sw2的另一端与电源v1的输入端和电源v2的输入端均连接,该端同时连接有电容c10的一端、电容c11的一端、电容c14的一端和电容c15的一端,所述电源v1的输出端连接有电容c12的一端、电容c13的一端和电阻r3的一端,所述电容c10的另一端、电容c11的另一端、电源v1的接地端、电容c12的另一端均与电容c13的另一端连接且共同接地,所述电阻r3的另一端连接有显示灯led3的一端,所述显示灯led3的另一端接地;所述电源v2的输出端连接有电容c16的一端和电容c17的一端,所述电容c14的另一端、电容c15的另一端、电源v2的接地端、电容c16的另一端均与电容c17的另一端连接且共同接地;所述电源v1的输出端还与除摄像模块8外的各用电单元连接且为除摄像模块8外的各用电单元供电,所述电源v2的输出端还与摄像模块8连接且为摄像模块8供电。
60.本实施例中,显示灯led3通电亮起后发出红光,显示灯led3灭代表机器人电路处于断开状态。
61.如图4所示,微处理器18采用stc89c52微处理器,stc89c52是一种低功耗、高性能cmos8位微处理器,具有8k字节系统可编程flash存储器。微处理器18包括第1至第40引脚,其中所述微处理器18的第20引脚接地,所述微处理器18的第40引脚连接电源v1的输出端。
62.摄像模块8采用open mv4 h7摄像头,用于采集图像,并能对采集到的图像进行处理,得出需要的数据,作为机器人的视觉,为机器人指引行进方向。微处理器18与摄像模块8连接用于接收摄像模块8输入的路况图像信号。
63.如图4、图5和图7所示,摄像模块8包括第1至第4引脚,摄像模块8的第3引脚与微处理器18的第10引脚连接,摄像模块8的第2引脚与微处理器18的第11引脚连接,所述摄像模块8的第1引脚接地,所述摄像模块8的第4引脚连接电源v2的输出端。
64.如图4、图5和图6所示,本实用新型中微处理器18的第10引脚和第11引脚亦作为串口调试工具与微处理器18进行连接的接口,用于调试微处理器18;串口调试工具的第1引脚接地,串口调试工具的的第4引脚连接电源v1的输出端。
65.指示灯17与微处理器18连接用于接收微处理器18输入的指示信号,指示灯17通过微处理18的i/o接口与微处理18连接用于指示机器人的行进方向。如图4和图8所示,指示灯17包括电阻r1、电阻r2、指示灯led1和指示灯led2,所述电阻r1的一端与微处理器18的第12
引脚连接,所述电阻r1的另一端与指示灯led1的一端连接,所述电阻r2的一端与微处理器18的第14引脚连接,所述电阻r2的另一端与指示灯led2的一端连接,所述指示灯led1的另一端与指示灯led2的另一端连接且共同接地。指示灯led1亮起时发出红光,指示灯led2亮起时发出绿光。
66.机器人在行进过程中,当机器人右拐时,指示灯led1亮起,当机器人左拐时,指示灯led2亮起,当机器人直行时,指示灯led1和指示灯led2同时亮起。
67.如图4、图5和图10所示,本实施例中包括控制系统电路通断的开关模块21,开关模块21包括按钮sw1、有极电容c3和电阻r4,所述有极电容c3的阳极连接电源v1的输出端且该端同时连接按钮sw1的一端,所述有极电容c3的阴极、按钮sw1的另一端均与电阻r4的一端连接,且所述有极电容c3的阴极、按钮sw1的另一端和电阻r4的一端均与微处理器18的第9引脚连接,所述电阻r4的另一端接地。
68.如图4、图5和图11所示,舵机控制模块20的数量为两个,且两个所述舵机控制模块20均包括第1至第8引脚,每个所述舵机控制模块20的第1至第8引脚均与地、电源v1的输出端和微处理器18连接,其中一个所述舵机控制模块20的第1至第8引脚分别连接微处理器18的第32至第39引脚,另一个所述舵机控制模块20的第1至第8引脚分别连接微处理器18的第1至第8引脚;
69.每个ldx
‑
227双轴数字舵机均包括三个接口,三个接口分别是电源接口、接地接口和信号接收接口,每个所述ldx
‑
227双轴数字舵机的电源接口均通过舵机控制模块20与电源v1的输出端连接,每个所述ldx
‑
227双轴数字舵机的接地接口均通过舵机控制模块20接地,每个所述ldx
‑
227双轴数字舵机的信号接收接口均通过舵机控制模块20与微处理器18连接用于接收动作信号。
70.本实用新型中一个stc89c52微处理器控制12个ldx
‑
227双轴数字舵机,stc89c52微处理器中的信号输出引脚即第1引脚至第9引脚和第32引脚至第39引脚共16个引脚中的12个引脚对应12个ldx
‑
227双轴数字舵机,使得stc89c52微处理器对12个ldx
‑
227双轴数字舵机发出控制信号。
71.ldx
‑
227双轴数字舵机采用插拔线的接线方式,防止脱焊的情况发生,同时便于更换数字舵机。微处理器18将接收到的路况图像信号后进行处理分析,控制数字舵机做出相应的动作,控制信号的多次循环使得机器人在不同的路况情况下实现趴下、站立、前进、左转弯、右转弯、直行等动作。学生参与电路设计,使得机器人做出多种动作,增强课堂的趣味性,易于学生掌握电学控制方面知识,增加学生对于机器人的认知程度、课堂教学的直观性、调动学生的认知积极性,提高学生的科技意识和创新精神。
72.如图4和图9所示,时钟模块9包括电容c0、电容c1和12m晶振,电容c0的一端与电容c1的一端连接且共同接地,电容c0的另一端分别连接12m晶振的一端和微处理器18的第19引脚;电容c1的另一端分别连接12m晶振的另一端和微处理器18的第18引脚。
73.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型作任何限制,凡是根据本实用新型技术实质对以上实施例所作的任何简单修改、变更以及等效结构变换,均仍属于本实用新型技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1