一种复合机器人底盘装置
1.本实用新型涉及底盘设备技术领域,具体涉及一种复合机器人底盘装置。
背景技术:
2.复合型机器人是一种集成移动机器人和通用工业机器人两项功能为一身的新型机器人。在工业领域,通用工业机器人被称为机械臂或者机械手,主要是替代人胳膊的抓取功能;而移动机器人是替代人腿脚的行走功能。而现有的复合机器人底盘的稳定性能较差,容易使得复合机器人在搬运较重物体或行驶速度较快时发生倾斜或侧翻,影响复合机器人的正常使用。
技术实现要素:
3.本实用新型的目的在于:为了解决复合机器人底盘稳定性能差的问题,提供一种复合机器人底盘装置。
4.本实用新型的目的可以通过以下技术方案实现:
5.一种复合机器人底盘装置,包括驱动机构,所述驱动机构包括矩形箱,所述矩形箱两侧的中间位置处均设置有驱动轮,所述驱动轮的内部固连有驱动轴,且驱动轴一端贯穿矩形箱侧壁并延伸至矩形箱的内部,所述矩形箱内底面的两端均固连有连接座,且连接座与对应位置处驱动轴的一端转动连接,所述矩形箱内底面的两端均固连有电机一,且电机一输出端与对应位置处驱动轴的一端传动连接,所述矩形箱的顶部固连有固定板,所述固定板上均匀开设有多个固定螺孔,所述固定板底部的两端均设置有稳固机构,使用时,利用固定板和固定螺孔便于复合机器人进行安装,并通过启动电机一,从而使得驱动轴和驱动轮进行转动,进而便于对该复合机器人底盘装置进行驱动。
6.进一步在于,所述稳固机构包括矩形框,所述矩形框的两端均设置有矩形块,所述矩形块的底部固连有万向轮。
7.进一步在于,所述矩形块一侧的底部均固连有l型板,所述l型板竖直段的中间位置处开设有螺纹孔,所述矩形框内部的中间位置处固连有连接杆,所述连接杆的中间位置处转动连接有螺杆,所述螺杆两端分别与对应位置处的螺纹孔旋合连接,通过启动电机三,从而使得带轮三进行转动,并利用皮带二和带轮四进使得螺杆进行转动,从而使得矩形块和l型板进行移动。
8.进一步在于,所述矩形框的内底部固连有电机三,所述电机三的输出端传动连接有带轮三,所述螺杆的外侧套接固定有带轮四,所述带轮三与带轮四之间传动连接有皮带二。
9.进一步在于,所述矩形框一侧的两端均设置有矩形板,所述矩形板顶部与矩形箱的内顶面固连,且矩形板底部与矩形箱的内底面固连,所述矩形框的一侧开设有滑槽,所述矩形框的一侧设置有推动板,所述推动板的两端均固连有滑块,且滑块与对应位置处的滑槽滑动连接,所述推动板一侧的两端均固连有推动杆,且推动杆一端与矩形框的一侧固连,
利用滑块和滑槽对推动板进行限位。
10.进一步在于,所述推动板的中间位置处开设有滑动通孔一,所述推动板一侧的中间位置处开设有滑动通孔二,且滑动通孔一与滑动通孔二连通。
11.进一步在于,所述矩形框的一侧设置有电机二,且电机二一端与矩形箱的内底面固连,所述电机二的输出端传动连有带轮一,所述电机二的一侧设置有转动板,所述转动板的一端套接固定有固定杆,且固定杆两端均与矩形箱的内侧壁转动连接,所述固定杆的一端套接固定有带轮二,所述带轮一和带轮二之间传动连接有皮带一。
12.进一步在于,所述转动板的另一端转动连接有转动杆,所述转动杆的两端均固连有驱动杆,且两个驱动杆均与滑动通孔一滑动连接,通过启动电机二,从而使得带轮一进行转动,利用皮带一和带轮二,从而使得转动板和驱动杆进行转动,进而使得推动板和推动杆进行移动,而推动杆移动使得矩形框、矩形块和万向轮进行移动。
13.本实用新型的有益效果:
14.1、通过在固定板底部的两端均设置有稳固机构,并利用固定板和固定螺孔便于复合机器人进行安装,且通过启动电机一,从而使得驱动轴和驱动轮进行转动,进而便于对该复合机器人底盘装置进行驱动;
15.2、通过启动电机二,从而使得带轮一进行转动,利用皮带一和带轮二,从而使得转动板和驱动杆进行转动,进而使得推动板和推动杆进行移动,而推动杆移动使得矩形框、矩形块和万向轮进行移动,再通过启动电机三,从而使得带轮三进行转动,并利用皮带二和带轮四进使得螺杆进行转动,从而使得矩形块和l型板进行移动,进而增大了该复合机器人底盘装置使用时的稳定性,避免了该复合机器人底盘装置使用时发生侧翻倾斜。
附图说明
16.下面结合附图对本实用新型作进一步的说明。
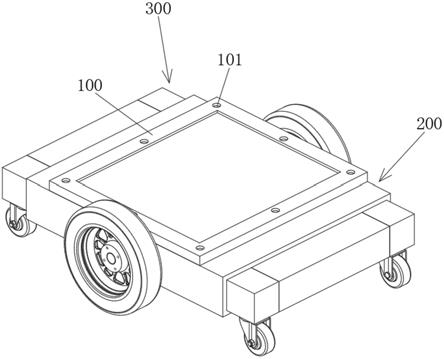
17.图1是本实用新型整体结构示意图;
18.图2是本实用新型中驱动机构结构示意图;
19.图3是本实用新型中稳固机构结构示意图;
20.图4是图3中a处局部放大图;
21.图5是本实用新型中l型板与螺杆的位置关系示意图。
22.图中:100、固定板;101、固定螺孔;200、驱动机构;210、驱动轮;220、连接座;230、电机一;240、驱动轴;250、矩形箱;300、稳固机构;310、矩形框;320、矩形块;321、万向轮;322、l型板;323、螺纹孔;330、电机二;331、带轮一;340、矩形板;341、滑槽;350、推动板;351、滑动通孔一;352、滑块;353、推动杆;360、转动板;361、转动杆;362、驱动杆;363、固定杆;364、带轮二;370、皮带一;380、电机三;381、带轮三;382、皮带二;390、螺杆;391、连接杆;392、带轮四。
具体实施方式
23.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的
所有其它实施例,都属于本实用新型保护的范围。
24.请参阅图1-5所示,一种复合机器人底盘装置,包括驱动机构200,驱动机构200包括矩形箱250,矩形箱250两侧的中间位置处均设置有驱动轮210,驱动轮210的内部固连有驱动轴240,且驱动轴240一端贯穿矩形箱250侧壁并延伸至矩形箱250的内部,矩形箱250内底面的两端均固连有连接座220,且连接座220与对应位置处驱动轴240的一端转动连接,矩形箱250内底面的两端均固连有电机一230,且电机一230输出端与对应位置处驱动轴240的一端传动连接,矩形箱250的顶部固连有固定板100,固定板100上均匀开设有多个固定螺孔101,固定板100底部的两端均设置有稳固机构300,使用时,利用固定板100和固定螺孔101便于复合机器人进行安装,并通过启动电机一230,从而使得驱动轴240和驱动轮210进行转动,进而便于对该复合机器人底盘装置进行驱动。
25.稳固机构300包括矩形框310,矩形框310的两端均设置有矩形块320,矩形块320的底部固连有万向轮321,矩形块320一侧的底部均固连有l型板322,l型板322竖直段的中间位置处开设有螺纹孔323,矩形框310内部的中间位置处固连有连接杆391,连接杆391的中间位置处转动连接有螺杆390,螺杆390两端分别与对应位置处的螺纹孔323旋合连接,通过启动电机三380,从而使得带轮三381进行转动,并利用皮带二382和带轮四392进使得螺杆390进行转动,从而使得矩形块320和l型板322进行移动,矩形框310的内底部固连有电机三380,电机三380的输出端传动连接有带轮三381,螺杆390的外侧套接固定有带轮四392,带轮三381与带轮四392之间传动连接有皮带二382,矩形框310一侧的两端均设置有矩形板340,矩形板340顶部与矩形箱250的内顶面固连,且矩形板340底部与矩形箱250的内底面固连,矩形框310的一侧开设有滑槽341,矩形框310的一侧设置有推动板350,推动板350的两端均固连有滑块352,且滑块352与对应位置处的滑槽341滑动连接,推动板350一侧的两端均固连有推动杆353,且推动杆353一端与矩形框310的一侧固连,利用滑块352和滑槽341对推动板350进行限位。
26.推动板350的中间位置处开设有滑动通孔一351,推动板350一侧的中间位置处开设有滑动通孔二,且滑动通孔一351与滑动通孔二连通,矩形框310的一侧设置有电机二330,且电机二330一端与矩形箱250的内底面固连,电机二330的输出端传动连有带轮一331,电机二330的一侧设置有转动板360,转动板360的一端套接固定有固定杆363,且固定杆363两端均与矩形箱250的内侧壁转动连接,固定杆363的一端套接固定有带轮二364,带轮一331和带轮二364之间传动连接有皮带一370,转动板360的另一端转动连接有转动杆361,转动杆361的两端均固连有驱动杆362,且两个驱动杆362均与滑动通孔一351滑动连接,通过启动电机二330,从而使得带轮一331进行转动,利用皮带一370和带轮二364,从而使得转动板360和驱动杆362进行转动,进而使得推动板350和推动杆353进行移动,而推动杆353移动使得矩形框310、矩形块320和万向轮321进行移动。
27.工作原理:使用时,利用固定板100和固定螺孔101便于复合机器人进行安装,并通过启动电机一230,从而使得驱动轴240和驱动轮210进行转动,进而便于对该复合机器人底盘装置进行驱动,且通过启动电机二330,从而使得带轮一331进行转动,利用皮带一370和带轮二364,从而使得转动板360和驱动杆362进行转动,进而使得推动板350和推动杆353进行移动,而推动杆353移动使得矩形框310、矩形块320和万向轮321进行移动,再通过启动电机三380,从而使得带轮三381进行转动,并利用皮带二382和带轮四392进使得螺杆390进行
转动,从而使得矩形块320和l型板322进行移动,进而增大了该复合机器人底盘装置使用时的稳定性,避免了该复合机器人底盘装置使用时发生侧翻倾斜。
28.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
29.以上内容仅仅是对本实用新型所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离实用新型或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1