用于多参数遥感采集系统的辅助设备的制作方法
1.本实用新型涉及航空领域,具体涉及一种用于多参数遥感采集系统的辅助设备。
背景技术:
2.随着航空对地观测技术的飞速发展,获取空间地理信息数据的手段丰富多样,采用单一手段获取的空间三维数据难以满足智慧信息时代的需求。以机载高精度三维激光数据与航空高光谱数据结合,成为近地遥感一种切实可行的思路,是航空对地探测技术体现建设的重要环节。
3.激光雷达和高光谱遥感作为两种常见的遥感手段,具有不同的优势:激光雷达能够快速、高效、精确地获取地物的三维空间数据,高光谱影像能表征地物的光谱数据,反映地物类型、材质等信息。将两种数据进行融合可实现优势互补,最大限度地发挥各自特点,对地物实现更加精确的智能探测与识别,以及高精度的分类与提取,可广泛应用于在地质灾害、环境监测、精准农林、生态普查等领域。
4.当前,机载航空全波段光谱系统设备和激光雷达系统设备已实现一体化采集,即多参数遥感探测系统。常见无人机或有人机飞行平台作为任务载体来执行对地探测任务。但是由于这类设备的内部精密电子元器件较多,尤其是应用于有人机型的设备一般体积和质量相对较大,搬运和安装过程中都易造成磕碰,导致设备受损,影响探测的精度,甚至无法工作。目前常见的应用于有人机机载多参数遥感采集系统在集成后一般总重量都在一百至数百公斤。因此,针对此类大型设备,减少搬运和安装过程中不必要的损害十分重要。
5.通常在安装大型航拍设备时,多使用与飞机搭配的修理板车或手推车进行设备的移动。而设备本身往往在设计阶段就忽略了搬运和安装的便捷性,只是考虑内部结构的优良化,忽视后期使用人员的可操作性。
技术实现要素:
6.本实用新型要解决的技术问题是:克服现有技术的不足,提供一种用于多参数遥感采集系统的辅助设备,解决目前针对机载航空全波段光谱系统设备和激光雷达系这类设备因体积和质量相对较大,搬运和安装过程中都易造成磕碰,导致设备受损,影响探测的精度,甚至无法工作的问题。
7.本实用新型解决其技术问题所采用的技术方案是:
8.提供一种用于多参数遥感采集系统的辅助设备,包括
9.设备底板,其底部设置至少三个脚卡扣;
10.至少三个脚轮,所述脚轮的轮座上端开设卡槽,所述卡槽与脚卡扣相卡接,以使脚轮与设备底板相卡接;
11.升降机,适于在设备底板下方支撑,以抬升设备底板。
12.进一步的,所述卡扣为t形结构,所述轮座上卡槽为t形卡槽。
13.进一步的,所述脚卡扣的底面开设定位球槽,所述轮座的卡槽底面设置定位球,所
述定位球在轮座上做上下弹性设置;
14.当所述轮座的卡槽与设备底板的脚卡扣相卡接时,所述定位球弹入定位球槽内。
15.进一步的,所述升降机的升降板上设置至少一个定位凸块,所述设备底板下表面开设定位凹槽;
16.所述定位凸块与定位凹槽配合,以使升降板与设备底板支撑配合。
17.进一步的,所述脚轮为固定脚轮或活动脚轮。
18.进一步的,所述定位球与轮座的安装结构为:
19.所述轮座内开设安装腔,所述安装腔在轮座上端面形成球孔,所述安装腔内设置压缩弹簧和定位球,所述定位球包括挡板和球体,所述挡板和球体为一体结构,所述挡板位于安装腔内,并与压缩弹簧相抵接,以使球体从球孔中伸出。
20.本实用新型的有益效果是:
21.本实用新型的用于多参数遥感采集系统的辅助设备,实现设备快速、便捷地搬运、装卸。其结构简单,使用方便,能够实现大型采集系统的单人安装操作。
附图说明
22.下面结合附图对本实用新型进一步说明。
23.图1是设备底板俯视图;
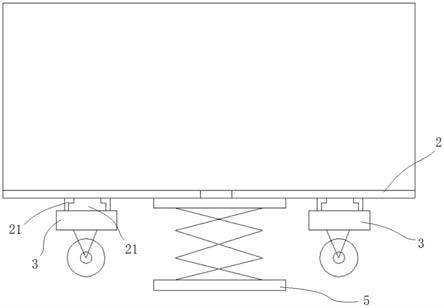
24.图2是设备底板侧视图;
25.图3是脚轮示意图;
26.图4是定位球与轮座的安装结构图;
27.图5是升降机示意图;
28.图6是升降机与设备底板的配合图;
29.其中,
30.2、设备底板,21、脚卡扣,22、定位球槽,23、定位凹槽;
31.3、脚轮,31、轮座,32、卡槽;33、定位球;
32.41、压缩弹簧;
33.5、升降机, 51、定位凸块,52、升降板。
具体实施方式
34.现在结合附图对本实用新型作进一步的说明。这些附图均为简化的示意图仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
35.如图1至图6所示,一种用于多参数遥感采集系统的辅助设备,包括
36.设备底板2,其底部设置至少三个脚卡扣21;
37.至少三个脚轮3,所述脚轮3的轮座31上端开设卡槽32,所述卡槽32与脚卡扣21相卡接,以使脚轮3与设备底板2相卡接;
38.升降机5,适于在设备底板2下方支撑,以抬升设备底板2。
39.本实施中,脚轮3的数量选用四个。
40.具体的,作为本实施例中一种可选的实施方式,如图2所示,所述卡扣为t形结构,所述轮座31上卡槽32为t形卡槽。
41.具体的,作为本实施例中一种可选的实施方式,如图2所示,所述脚卡扣21的底面开设定位球槽,所述轮座31的卡槽32底面设置定位球33,所述定位球33在轮座31上做上下弹性设置;
42.当所述轮座31的卡槽32与设备底板2的脚卡扣21相卡接时,所述定位球33弹入定位球槽22内。
43.具体的,作为本实施例中一种可选的实施方式,如图5所示,所述升降机5的升降板52上设置至少一个定位凸块51,所述设备底板2下表面开设定位凹槽23;
44.所述定位凸块51与定位凹槽23配合,以使升降板52与设备底板2支撑配合。
45.本实施例中,定位凸块51的数量为两块。通过定位凸块51与定位凹槽23配合,使升降机5可以对设备底板2进行稳定的抬升。
46.具体的,作为本实施例中一种可选的实施方式,如图2所示,所述脚轮3为固定脚轮或活动脚轮。
47.四个脚轮可以均采用固定脚轮,或者均实用活动脚轮,或者采用两个固定脚轮搭配两个活动脚轮。
48.具体的,作为本实施例中一种可选的实施方式,如图4所示,所述定位球33与轮座31的安装结构为:
49.所述轮座31内开设安装腔,所述安装腔在轮座31上端面形成球孔,所述安装腔内设置压缩弹簧41和定位球33,所述定位球33包括挡板和球体,所述挡板和球体为一体结构,所述挡板位于安装腔内,并与压缩弹簧41相抵接,以使球体从球孔中伸出。
50.具体的,在安装腔上设置一个盖板,打开盖板可以安装压缩弹簧41和定位球33,盖板通过螺丝紧固在轮座31上。
51.本实施例中,制作出来的脚轮高度控制至在18cm左右,高度比直升机的下方装载板高度略高出一些。装载板与直升机的两个滑橇固定连接。
52.本实用新型中,脚轮的原理和结构都是现有的,可以是固定式的,也可以是活动式的,对于脚轮主要能根据直升机装载板的离地距离来控制高脚轮的角度。
53.对于升降机5,采用液压升降机,如图5所示,升降机5的原理结构均属于现有技术,包括底板、升降板52、两组剪叉式连杆、液压缸以及液压泵,液压缸连接在底板和升降板52之间,两组剪叉式连杆分别与底板和升降板52连接,通过控制液压泵向液压缸内供液压油使液压缸伸出,带动升降板52抬升。本实用新型的升降机5,在升降板52缩回之后,整个升降机5的高度在10cm左右,升降板52抬升之后,升降机5的高度在20cm左右,整个升降机5可以抬升最大200斤的设备。
54.本实用新型的辅助设备搬运过程如下:
55.车间内的系统设备吊装到设备底板2上,设备底板2放置到升降机5上,升降板52的定位凸块51与设备底板2的定位凹槽23相配合,通过升降机5抬升设备底板2,然后再设备底板2下方插接上四个脚轮,然后升降机5向下缩回,使四个脚轮着地,取走升降机5,通过四个脚轮将设备移至直升机的装载板旁边,设备底板2略高于装载板,推动系统设备至直升机的装载板上即可。(如有描述不准确的时候,可以重新改正梳理一下)
56.本实用新型的用于多参数遥感采集系统的辅助设备,实现设备快速、便捷地搬运、装卸。其结构简单,使用方便,能够实现大型采集系统的单人安装操作。
57.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1