一种用于污泥滤板转运的运输车的制作方法
1.本实用新型涉及压滤式污泥脱水设备技术领域,具体涉及一种用于污泥滤板转运的运输车。
背景技术:
2.污泥是污水处理厂以及污水站污水处理后的必然产物,未经过很好处理处置的污泥进入环境后,将会直接给水体和大气带来二次污染,对生态环境和人类的活动也将构成了严重的威胁。污泥脱水是将流态的原生、浓缩或消化污泥脱除水分,转化为半固态或固态泥块的一种污泥处理方法。经过脱水后,污泥含水率可降低到百分之五十五至百分之八十,压滤式污泥脱水设备是目前最常见的污泥脱水方式,申请人所生产的压滤式污泥脱水设备是通过放料装置将污泥放置在污泥滤板上,然后通过将若干装满污泥的污泥滤板叠放在滤板存储车里,然后通过牵引,将滤板存储车牵引到压滤机下方,然后启动压滤机压板下压以挤出污泥水分,这样就完成了污泥的脱水作业。然而传统的滤板存储车主要通过人工牵引或者是设置轨道车牵引运输,人工牵引费时费力,作业效率低下,而通过轨道车牵引则需要在作业区内设置轨道,面对比较复杂的地形时就很难设置,同时由于轨道拆卸麻烦,在有更改运输线路需要时就会非常繁琐。
3.因此,需要一种自动化程度高还能够适应不同作业地形,而且还不需要设置复杂轨道的用于污泥滤板转运的运输车。
技术实现要素:
4.为此,本实用新型提供一种用于污泥滤板转运的运输车,旨在解决现有的污泥滤板运输车自动化程度低,轨道设置复杂无法适应复杂地形而且还无法快速更改运输线路等缺陷。
5.为了实现上述目的,本实用新型提供如下技术方案:一种用于污泥滤板转运的运输车,包括自动牵引车以及滤板存储车,其中自动牵引车包括无线信号接收器,电气控制柜,牵引车车轮,牵引架,磁引导传感器,可充电蓄电池,链轮链条机构,电机,磁引导传感器设置在自动牵引车车体下方,磁引导传感器与电气控制柜电性连接,电气控制柜根据磁引导传感器发送的信息控制自动牵引车的行进路线,电机通过链轮链条机构驱动牵引车车轮转动进而控制自动牵引车的作动,无线信号接收器可以远程接收控制人员使用电脑等设备提前编写好的控制程序并传输给电气控制柜以驱动自动牵引车按照预定方式进行作业,可充电蓄电池与无线信号接收器,电气控制柜,电机电性连接,并为这些电气元件提供运行所需电能,牵引架固定设置在自动牵引车侧面;滤板存储车通过牵引架与自动牵引车活动连接,滤板存储车包括有多个激光感应器,多个导向柱,车体底座,多个存储车车轮,导向柱固定设置在车体底座上,激光感应器固定设置在导向柱上侧,激光感应器与自动牵引车上的电气控制柜电性连接,电气控制柜根据激光感应器传输的信息来控制自动牵引车的启停,存储车车轮固定设置在车体底座下侧。
6.进一步地,自动牵引车还配套设有软性磁条,软性磁条按照设计运输路径粘贴在地面上,磁引导传感器能够感应粘贴在地面的软性磁条,电气控制柜接收到磁引导传感器的感应信息就可以驱动自动牵引车按照软性磁条铺设路径进行作动。
7.进一步地,存储车车轮为四个万向轮,同时四个万向轮底座固定设置在车体底座下侧四角,万向轮增加了滤板存储车的灵活性,在遇到比较复杂的运输路线时可以更加灵活地通过。
8.进一步地,导向柱外表面设有铁基合金粉末热喷焊工艺层,由于污泥脱水作业环境湿度高,导向柱容易受到氧化腐蚀,而铁基合金粉末热喷焊工艺层具有良好的抗腐蚀性能,可以保证导向柱在长时间的使用后不被腐蚀。
9.本实用新型的工作原理是:
10.自动牵引车通过磁引导传感器跟电气控制柜来控制行进路线,通过设置在滤板存储车导向柱上的激光感应器控制电机启停,每道工序对应设备上有激光发射器,滤板存储车在每项工序的预定工位恰好是导向柱的激光感应器可以感应到激光发射器发射的信号的位置,当滤板存储车到达预定工位,激光感应器将到位信息传输给电气控制柜来控制牵引车停止前进,然后根据预设程序,在相应工位上停止预定作业时间后,自动牵引车再次启动,将滤板存储车牵引至下一道工序工位处。按照该程序循环执行,这样就完成了滤板的自动化运输流程。
11.与现有技术相比,本实用新型的有益效果是:
12.1.通过设置磁引导传感器的方式来控制污泥滤板运输车的行进方向,这样只需要在需要运输的线路上铺设磁条就可以完成,磁条铺设不受地形的影响,施工难度低,同时在后期如果需要变更运输线路的话,只需要把原本粘贴好的磁条撕除,然后根据新路线重新铺设磁条就可以,方便快捷,使用灵活性高。
13.2.通过在滤板存储车与自动牵引车活动连接,自动牵引车可以按照标准化生产,然后根据不同的使用需要,来更换不同规格的滤板存储车,这样大大提高了使用灵活性。
14.3.通过滤板存储车导向柱上的激光感应器来感应滤板存储车到达预定工位,并通过发送信息给电气控制柜来控制自动牵引车停止前进以完成当前工位的作业,不需要再通过人工的方式来调整滤板存储车的位置,大大提高了整个污泥脱水流程的自动化程度和定位准确性。
附图说明
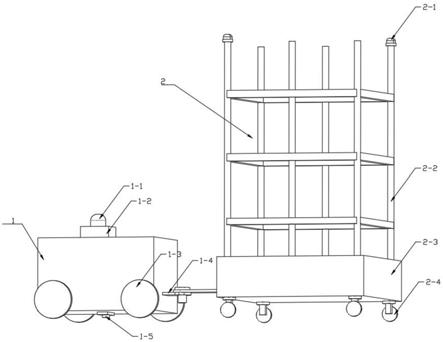
15.图1为本实用新型提供的一种用于污泥滤板转运的运输车整体结构示意图;
16.图2为本实用新型提供的自动牵引车内部结构示意图。
17.图中:1、自动牵引车,1-1、无线信号接收器,1-2、电气控制柜,1-3、牵引车车轮,1-4、牵引架,1-5、磁引导传感器,1-6、可充电蓄电池,1-7、链轮链条机构,1-8、电机,2、滤板存储车,2-1、激光感应器,2-2、导向柱, 2-3、车体底座,2-4存储车车轮。
具体实施方式
18.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
19.实施例1,参照附图1~附图2,本实用新型提供的一一种用于污泥滤板转运的运输车,包括自动牵引车1以及滤板存储车2,其中自动牵引车1包括无线信号接收器1-1,电气控制柜1-2,牵引车车轮1-3,牵引架1-4,磁引导传感器 1-5,可充电蓄电池1-6,链轮链条机构1-7,电机1-8,磁引导传感器1-5设置在自动牵引车1车体下方,软性磁条按照设计运输路径粘贴在地面上,磁引导传感器1-5能够感应粘贴在地面的软性磁条,电气控制柜1-2接收到磁引导传感器1-5的感应信息就可以驱动自动牵引车1按照软性磁条铺设路径进行作动,电机1-8通过链轮链条机构1-7驱动牵引车车轮1-3转动进而控制自动牵引车1 的作动,无线信号接收器1-1可以远程接收控制人员使用电脑等设备提前编写好的控制程序并传输给电气控制柜1-2以驱动自动牵引车1按照预定方式进行作业,可充电蓄电池1-6与无线信号接收器1-1,电气控制柜1-2,电机1-8电性连接,并为这些电气元件提供运行所需电能,牵引架1-4固定设置在自动牵引车1侧面;滤板存储车2通过牵引架1-4与自动牵引车1活动连接,滤板存储车2包括有激光感应器2-1,导向柱2-2,车体底座2-3,存储车车轮2-4,导向柱2-2外表面设有铁基合金粉末热喷焊工艺层用以提升导向柱2-2的抗腐蚀性能,导向柱2-2固定设置在车体底座2-3上,激光感应器2-1固定设置在导向柱2-2上侧,激光感应器2-1与自动牵引车1上的电气控制柜1-2电性连接,电气控制柜1-2根据激光感应器2-1传输的信息来控制自动牵引车1的启停,存储车车轮2-4为四个万向轮固定设置在车体底座2-3下侧四角。
20.本实用新型的工作过程如下:
21.自动牵引车1通过磁引导传感器1-5跟电气控制柜1-2来控制行进路线,通过设置在导向柱2-2上的激光感应器2-1控制电机1-8启停,每道工序对应设备上有激光发射器,滤板存储车2在每项工序的预定工位恰好是导向柱2-2 的激光感应器2-1可以感应到激光发射器发射的信号的位置,当滤板存储车2 到达预定工位,激光感应器2-1将到位信息传输给电气控制柜1-2来控制牵引车停止前进,然后根据预设程序,在相应工位上停止预定作业时间后,自动牵引车1再次启动,将滤板存储车2牵引至下一道工序工位处。按照该程序循环执行,这样就完成了滤板的自动化运输流程。
22.以上,仅是本实用新型的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本实用新型加以修改或将其修改为等同的技术方案。因此,依据本实用新型的技术方案所进行的任何简单修改或等同置换,尽属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1