一种铰接式工程机械及其自移动爬梯系统的制作方法
1.本实用新型属于工程机械技术领域,具体涉及一种铰接式工程机械及其自移动爬梯系统。
背景技术:
2.铰接式工程机械的驾驶室大多布置在铰接式车架的中间部位,即位于铰接机构的上方,需要借助爬梯方可进入。传统的固定式爬梯处于机身中间,在选择爬梯的固定位置时很难做到同时兼顾爬梯上下车时的舒适性和不妨碍整机的最大转向角度。如果将爬梯设置在上下车最方便的位置,即距铰接机构中心最近处,会大幅减少整机的最大可转向角度,加大整机的最大转弯直径,从而大幅降低整机的通过性;如果爬梯设置在距铰接机构中心最远处,爬梯距离驾驶室的通道就会偏离很多,操作人员上下车时非常不方便。
技术实现要素:
3.本实用新型的目的在于克服现有技术中的不足,提供一种铰接式工程机械及其自移动爬梯系统,结构简单,合理的运用了设计空间,提高了驾驶员上下爬梯的舒适度,增大了工程机械的最大转向角度,增强了工程机械转向的安全性,实用性强。
4.本实用新型提供了如下的技术方案:
5.第一方面,提供一种铰接式工程机械的自移动爬梯系统,包括通过铰接机构相连的前车架和后车架,所述后车架上设有位于铰接机构上方的驾驶室,还包括爬梯机构、传感器机构和控制器;所述爬梯机构包括爬梯固定部和爬梯移动部,所述爬梯固定部包括设于后车架的支撑框以及设于支撑框上的直线电机,所述直线电机与爬梯移动部相连,且能够驱动爬梯移动部水平移动;所述传感器机构用于监测驾驶室门是否开启或者监测铰接机构的转动角度;所述传感器机构和直线电机分别与控制器相连。
6.进一步的,所述传感器机构包括与控制器相连的位置传感器,所述位置传感器安装于驾驶室门上,所述位置传感器用于监测驾驶室门是否开启。
7.进一步的,所述传感器机构包括与控制器相连的角度传感器,所述角度传感器安装于铰接机构上,所述角度传感器用于监测铰接机构的转动角度。
8.进一步的,所述爬梯移动部包括移动架以及与移动架相连的若干爬梯节,所述移动架上部连接有拉杆,所述拉杆与直线电机相连。
9.进一步的,所述爬梯移动部还包括若干滚轮,所述滚轮均匀安装于移动架的两侧,所述支撑框内设有容纳滚轮移动的、水平设置的滑槽。
10.进一步的,所述支撑框边缘设有固定板,所述固定板设有用于安装螺栓的固定孔。
11.第二方面,提供一种铰接式工程机械,包括第一方面所述的自移动爬梯系统,所述爬梯机构安装于后车架的左侧或者右侧。
12.与现有技术相比,本实用新型的有益效果是:
13.(1)本实用新型中的传感器机构用于监测驾驶室门是否开启或者监测铰接机构的
转动角度,若监测到驾驶室门开启或者铰接机构的转向角度小于预设角度,则将该信号发送至控制器处,控制器发出信号控制直线电机工作,直线电机驱动爬梯移动部水平移动至上下车最佳位置,方便驾驶人员上下车;若监测到驾驶室门关闭或者铰接机构的转向角度达到预设角度,则将该信号发送至控制器处,控制器发出信号控制直线电机工作,驱动爬梯移动部移动至距离铰接机构最远处,避免工程机械转向时前车架与爬梯机构相撞;
14.(2)本实用新型结构简单,合理的运用了设计空间,提高了驾驶员上下爬梯的舒适度,增大了工程机械的最大转向角度,增强了工程机械转向的安全性,实用性强。
附图说明
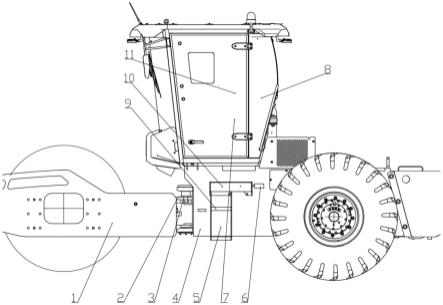
15.图1是本实用新型的结构示意图;
16.图2是爬梯机构的侧视图;
17.图3是图2中a局部的结构放大图;
18.图4是爬梯机构的主视图;
19.图5是本实用新型爬梯移动部远离铰接机构时的结构示意图;
20.图6是本实用新型爬梯移动部靠近铰接机构时的结构示意图;
21.图中标记为:1、前车架;2、角度传感器;3、铰接机构;4、后车架;5、爬梯机构;6、直线电机;7、驾驶室门;8、驾驶室;9、爬梯移动部;9-1、移动架;9-2、滚轮;9-3、拉杆;9-4、爬梯节;10、爬梯固定部;10-1、支撑框;10-2、固定板;10-3、固定孔;10-4、滑槽;11、位置传感器。
具体实施方式
22.下面结合附图对本实用新型作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
23.需要说明的是,在本实用新型的描述中,术语“前”、“后”、“左”、“右”、“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图中所示的方位或位置关系,仅是为了便于描述本实用新型而不是要求本实用新型必须以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.实施例1
25.如图1所示,本实施例提供一种铰接式工程机械的自移动爬梯系统,包括通过铰接机构3相连的前车架1和后车架4,后车架4上设有位于铰接机构3上方的驾驶室8。本实施例的自移动爬梯系统还包括爬梯机构5、传感器机构和控制器,其中爬梯机构5包括爬梯固定部10和爬梯移动部9。
26.如图1-4所示,爬梯固定部10包括设于后车架4的支撑框10-1以及设于支撑框10-1上的直线电机6,直线电机6与控制器电性连接,支撑框10-1边缘设有固定板10-2,固定板10-2设有用于安装螺栓的固定孔10-3,便于支撑框10-1的安装固定。
27.如图1-4所示,直线电机6与爬梯移动部9相连,且能够驱动爬梯移动部9水平移动。具体的,爬梯移动部9包括移动架9-1以及与移动架9-1相连的若干爬梯节9-4,移动架9-1上部连接有拉杆9-3,拉杆9-3与直线电机6相连,直线电机6移动时能够带动拉杆9-3移动,从而带动移动架9-1及爬梯节9-4一起移动。爬梯移动部9还包括若干滚轮9-2,滚轮9-2均匀安装于移动架9-1的两侧,支撑框10-1内设有容纳滚轮9-2移动的、水平设置的滑槽10-4,该设
计能够提高爬梯移动部9移动时的稳定性和安全性。
28.如图1所示,传感器机构包括与控制器相连的位置传感器11,位置传感器11安装于驾驶室门7上,位置传感器11用于监测驾驶室门7是否开启。
29.本实施例的工作原理为:初始状态下,爬梯移动部9位于满足最大转向角位置,即距铰接机构3最远处;当位置传感器11监测到驾驶室门7开启时,将该信号发送至控制器处,控制器发出信号控制直线电机6工作,直线电机6驱动爬梯移动部9水平移动至上下车最佳位置(图6中位置),方便驾驶人员上下车;当位置传感器11监测到驾驶室门7关闭,则将该信号发送至控制器处,控制器发出信号控制直线电机6工作,驱动爬梯移动部9移动至距离铰接机构3最远处(图5中位置),避免工程机械转向时前车架与爬梯机构5相撞,此时整机具备最大转向角度。
30.实施例2
31.本实施例提供一种铰接式工程机械的自移动爬梯系统,除传感器机构外,其它结构与实施例1中相同。
32.如图1所示,本实施例的传感器机构包括与控制器相连的角度传感器2,角度传感器2安装于铰接机构3上,角度传感器2用于监测铰接机构3的转动角度。
33.本实施例的工作原理为:初始状态下,爬梯移动部9位于上下车最佳位置,即距铰接机构3最近处;当角度传感器2监测到铰接机构3的转向角度达到预设角度时,将该信号发送至控制器处,控制器发出信号控制直线电机6工作,驱动爬梯移动部9移动至距离铰接机构3最远处(图5中位置),避免工程机械转向时前车架1与爬梯机构5相撞,此时整机具备最大转向角度;当角度传感器2监测到铰接机构3的转向角度小于预设角度时,将该信号发送至控制器处,控制器发出信号控制直线电机6工作,驱动爬梯移动部9水平移动至上下车最佳位置(图6中位置),方便驾驶人员上下车。
34.实施例3
35.本实施例提供一种铰接式工程机械,包括实施例1或2所述的自移动爬梯系统,爬梯机构5安装于后车架4的左侧或者右侧,图5和6中所示为爬梯机构5安装于后车架4的左侧。
36.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1