一种仿蚤蝼异时双储能式高角度跳跃机器人及其跳跃方法
1.本发明涉及仿生跳跃机器人领域,特别涉及一种仿蚤蝼异时双储能式高角度跳跃机器人及其跳跃方法。
背景技术:
2.随着科技的发展,人类越来越希望机器人可以在非确定工况环境下进行工作;而为了在复杂环境中正常工作,机器人则需要有一定越障与躲避危险的能力;采用跳跃行为进行越障或快速移动可以满足相关需求;而起跳角度越高,意味着完成越障所需的空间越少,对于机器人应对复杂环境更有利;目前,国内外发明了很多跳跃机器人,但是大部分机器人仅考虑了机器人的跳跃能力,跳跃姿态与起跳角度并未有考虑。而目前将创新集中于跳跃角度与姿态的跳跃机器人,结构与控制相对复杂,成本较高。
3.蚤蝼是一种生活在湿润土壤环境的昆虫,该昆虫利用其独特的跳跃足结构,可以实现高角度快速跳跃。
技术实现要素:
4.基于上述背景,本发明提供了一种仿蚤蝼异时双储能式高角度跳跃机器人及其跳跃方法。
5.一种仿蚤蝼异时双储能式高角度跳跃机器人,包括躯体模块与跳跃模块;躯体模块包括躯体与支撑腿,躯体中有a定位方孔、b定位方孔、c定位方孔、d定位方孔、e安装圆孔和f安装圆孔,躯体的a定位方孔、b定位方孔、c定位方孔、d定位方孔安装支撑腿,躯体的e安装圆孔和f安装圆孔处安装跳跃模块;支撑腿包括上支撑杆和下支撑杆;跳跃模块包括电机、股节杆、第一扭簧、胫节杆、第二扭簧、端节杆与足垫,电机尾端与躯体模块固定,电机输出端与股节杆首部连接,股节杆末端与胫节杆首部铰接,第一扭簧的一端与股节杆固定,第一扭簧另一端与胫节杆固定,胫节杆末端与端节杆首部铰接,第二扭簧的一端与胫节杆固定,第二扭簧另一端与端节杆固定,端节杆末端固定足垫,股节杆、胫节杆与端节杆的长度比为1:0.9:0.3,躯体的e安装圆孔和f安装圆孔位于躯体的1/3处。
6.一种仿蚤蝼异时双储能式高角度跳跃机器人的跳跃方法:
7.起跳过程中,支撑腿稳定躯体模块,起跳过程分为三个阶段:
8.第一阶段:电机工作,股节杆下压,带动第一扭簧发生形变,产生弹性势能,胫节杆末端(靠近端节杆的端点)与足垫与基底保持接触;
9.第二阶段:电机停止工作,第一扭簧释放弹性势能,机器人开始起跳,胫节杆末端(靠近端节杆的端点)与足垫与基底保持接触,胫节杆在此阶段开始绕末端(靠近端节杆的端点)旋转,带动第二扭簧发生形变,产生弹性势能;
10.第三阶段:电机继续停止工作,随着机器人起跳高度的增加,胫节杆末端(靠近端节杆的端点)脱离基底,足垫继续与基底保持接触,第二扭簧释放弹性势能,推动机器人继续起跳,直至足垫与基底脱离接触,起跳完成。
11.本发明可以实现高角度起跳,结构简单,兼容性强,控制容易,易于组装。
12.本发明的有益效果是:
13.1、本发明实现了高角度跳跃。
14.2、本发明将向前的动能转换为第二扭簧的弹性势能,在起跳阶段后期转换为向上的动能,强化了跳跃能力。相对于其他跳跃机构,结构简单,成本低。
附图说明
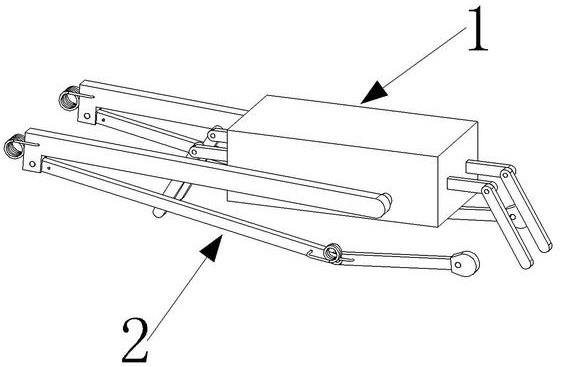
15.图1为本发明的立体图;
16.图2为本发明的躯体模块的立体图;
17.图3为本发明的躯体的立体图;
18.图4为本发明的跳跃模块的立体图;
19.图5为本发明的正视图。
具体实施方式
20.如图1、图2、图3、图4和图5所示,一种仿蚤蝼异时双储能式高角度跳跃机器人,包括躯体模块1与跳跃模块2;躯体模块1包括躯体11与支撑腿12,躯体11中有a定位方孔、b定位方孔、c定位方孔、d定位方孔、e安装圆孔和f安装圆孔,躯体11的a定位方孔、b定位方孔、c定位方孔、d定位方孔安装支撑腿12,躯体11的e安装圆孔和f安装圆孔处安装跳跃模块2,支撑腿12包括上支撑杆121和下支撑杆122;
21.跳跃模块2包括电机21、股节杆22、第一扭簧23、胫节杆24、第二扭簧25、端节杆26与足垫27,电机21尾端与躯体模块1固定,电机21输出端与股节杆22首部连接,股节杆22末端与胫节杆24首部铰接,第一扭簧23的一端与股节杆22固定,第一扭簧23另一端与胫节杆24固定,胫节杆24末端与端节杆26首部铰接,第二扭簧25的一端与胫节杆24固定,第二扭簧25另一端与端节杆26固定,端节杆26末端固定足垫27。
22.股节杆22、胫节杆24与端节杆26的长度比为1:0.9:0.3。躯体11的e安装圆孔和f安装圆孔位于躯体11的1/3处。
23.一种仿蚤蝼异时双储能式高角度跳跃机器人的跳跃方法:
24.起跳过程中,支撑腿12稳定躯体模块1,起跳过程分为三个阶段:
25.第一阶段:电机21工作,股节杆22下压,带动第一扭簧23发生形变,产生弹性势能,胫节杆24末端(靠近端节杆26的端点)与足垫27与基底保持接触;
26.第二阶段:电机21停止工作,第一扭簧23释放弹性势能,机器人开始起跳,胫节杆24末端(靠近端节杆26的端点)与足垫27与基底保持接触,胫节杆24在此阶段开始绕末端(靠近端节杆26的端点)旋转,带动第二扭簧25发生形变,产生弹性势能;
27.第三阶段:电机21继续停止工作,随着机器人起跳高度的增加,胫节杆24末端(靠近端节杆26的端点)脱离基底,足垫27继续与基底保持接触,第二扭簧25释放弹性势能,推动机器人继续起跳,直至足垫27与基底脱离接触,起跳完成。
技术特征:
1.一种仿蚤蝼异时双储能式高角度跳跃机器人,其特征在于:包括躯体模块(1)与跳跃模块(2);躯体模块(1)包括躯体(11)与支撑腿(12),躯体(11)中有a定位方孔、b定位方孔、c定位方孔、d定位方孔、e安装圆孔和f安装圆孔,躯体(11)的a定位方孔、b定位方孔、c定位方孔、d定位方孔安装支撑腿(12),躯体(11)的e安装圆孔和f安装圆孔处安装跳跃模块(2),支撑腿(12)包括上支撑杆(121)和下支撑杆(122);跳跃模块(2)包括电机(21)、股节杆(22)、第一扭簧(23)、胫节杆(24)、第二扭簧(25)、端节杆(26)与足垫(27),电机(21)尾端与躯体模块(1)固定,电机(21)输出端与股节杆(22)首部连接,股节杆(22)末端与胫节杆(24)首部铰接,第一扭簧(23)的一端与股节杆(22)固定,第一扭簧(23)另一端与胫节杆(24)固定,胫节杆(24)末端与端节杆(26)首部铰接,第二扭簧(25)的一端与胫节杆(24)固定,第二扭簧(25)另一端与端节杆(26)固定,端节杆(26)末端固定足垫(27)。2.根据权利要求1所述的一种仿蚤蝼异时双储能式高角度跳跃机器人,其特征在于:所述的股节杆(22)、胫节杆(24)与端节杆(26)的长度比为1:0.9:0.3;躯体(11)的e安装圆孔和f安装圆孔位于躯体(11)的1/3处。3.权利要求1所述一种仿蚤蝼异时双储能式高角度跳跃机器人的跳跃方法,其特征在于:起跳过程中,支撑腿(12)稳定躯体模块(1),起跳过程分为三个阶段:第一阶段:电机(21)工作,股节杆(22)下压,带动第一扭簧(23)发生形变,产生弹性势能,胫节杆(24)末端与足垫(27)与基底保持接触;第二阶段:电机(21)停止工作,第一扭簧(23)释放弹性势能,机器人开始起跳,胫节杆(24)末端与足垫(27)与基底保持接触,胫节杆(24)在此阶段开始绕末端旋转,带动第二扭簧(25)发生形变,产生弹性势能;第三阶段:电机(21)继续停止工作,随着机器人起跳高度的增加,胫节杆(24)末端脱离基底,足垫(27)继续与基底保持接触,第二扭簧(25)释放弹性势能,推动机器人继续起跳,直至足垫(27)与基底脱离接触,起跳完成。
技术总结
一种仿蚤蝼异时双储能式高角度跳跃机器人及其跳跃方法,包括躯体模块与跳跃模块;躯体模块包括躯体与支撑腿,躯体中有4个定位方孔和2个安装圆孔,4个定位方孔安装支撑腿,2个安装圆孔处安装跳跃模块;支撑腿包括上支撑杆和下支撑杆;跳跃模块包括电机、股节杆、第一扭簧、胫节杆、第二扭簧、端节杆与足垫,电机尾端与躯体模块固定,电机输出端与股节杆首部连接,股节杆末端与胫节杆首部铰接,第一扭簧两端分别与股节杆固定和胫节杆固定,胫节杆末端与端节杆首部铰接,第二扭簧两端分别与胫节杆割端节杆固定。本发明可以实现高角度起跳,结构简单,兼容性强,控制容易,易于组装。易于组装。易于组装。
技术研发人员:佟金 高子博 曹成全 李默 吴宝广 马云海 孙霁宇 宋伟 高鹏 李金光 许子和
受保护的技术使用者:吉林大学
技术研发日:2022.01.27
技术公布日:2022/3/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1