一种行进式教育类机器人的平衡组件的制作方法
1.本发明涉及教育机器人技术领域,具体为一种行进式教育类机器人的平衡组件。
背景技术:
2.随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多,在教育领域,许多院校已在学生中开设了机器人学方面的有关课程,教学用机器人是一种适合大中专学生的具有开放式特征的实训实验平台,是多种高科技的融合。
3.现有的教育类机器人在运动的过程中可能出现倾倒的问题,机器人底部出现障碍物或运动到斜坡的位置,可能会影响机器人的重心,进而可能会导致机器人倾倒,当机器人出现倾倒容易碰撞到地面或碰撞到周围的使用者,可能对机器人自身产生了损坏,导致机器人需要维修,同时也容易造成周围人员受伤,进而降低了机器人使用的安全性。
4.为此,提出一种行进式教育类机器人的平衡组件。
技术实现要素:
5.本发明的目的在于提供一种行进式教育类机器人的平衡组件,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种行进式教育类机器人的平衡组件,包括基座,所述基座的底部设置有移动机构,所述基座的底部设置有支撑机构,所述基座的内部设置有控制机构,所述基座的外侧设置有固定机构,所述基座的顶部活动连接有稳定机构。
7.优选的,所述移动机构包括轴承、转动杆、第一滚轮、转动槽和第二滚轮,所述基座的下表面的中部固定连接有轴承,所述轴承的中部固定连接有转动杆,所述转动杆的下端转动连接有第一滚轮,所述基座底部的边缘处开设有转动槽,所述转动槽的内部转动连接有第二滚轮。
8.优选的,所述第一滚轮与设备使用电源电性连接,所述第二滚轮在基座底部的边缘处均匀设置有八个,所述第二滚轮的尺寸大于转动槽的尺寸。
9.优选的,所述支撑机构包括收缩槽、支撑杆、第一滑槽、电动伸缩杆、第三滚轮和杠杆,所述基座底部的边缘处开设有收缩槽,所述基座底部设置有支撑杆,所述支撑杆的底部贯穿开设有第一滑槽,所述基座的底部转动连接有电动伸缩杆,所述电动伸缩杆输出端的外侧且靠近收缩槽的内部转动连接有第三滚轮,所述电动伸缩杆输出端的顶部转动连接有杠杆,所述杠杆的顶部与基座的内部转动连接。
10.优选的,所述电动伸缩杆在基座的底部均匀设置有八个,所述电动伸缩杆的尺寸小于收缩槽的尺寸,所述杠杆的底部滑动在第一滑槽的内部。
11.优选的,所述控制机构包括第一活动槽、电触板、支撑架、第一万向槽、第二活动槽、第二滑槽、置物室、第一万向球、第一摆杆、配重块、电触块、第二摆杆、第二万向球、挡板和第二万向槽,所述基座的内部开设有第一活动槽,所述第一活动槽的底部固定连接与电
触板,所述基座的顶部且靠近第一活动槽的顶部通过螺栓固定连接有支撑架,所述支撑架的内部开设有第一万向槽,所述支撑架的内部且靠近第一万向槽的顶部开设有第二活动槽,所述支撑架的内部且靠近第二活动槽的顶部开设有第二滑槽,所述支撑架的内部且靠近第二滑槽的顶部开设有置物室,所述第一万向槽的内部活动连接有第一万向球,所述第一万向球的底部且靠近第一活动槽的内部固定连接有第一摆杆,所述第一摆杆的下端固定连接有配重块,所述第一摆杆的底部固定连接有电触块,所述第一万向球的顶部固定连接有第二摆杆,所述第二摆杆的顶部固定连接有第二万向球,所述第二滑槽的内部滑动连接有挡板,所述挡板下表面的中部开设有第二万向槽,所述第二万向球活动在第二万向槽的内部。
12.优选的,所述电触板与设备使用电源电性连接,所述第一万向槽的上下均设置为倒角状,所述置物室的内部设置有润滑油,所述第一万向球的尺寸与第一万向槽的尺寸相互适配,所述第一摆杆的转动范围与第一活动槽的形状相互适配,所述电触块与电动伸缩杆电性连接,所述第二摆杆为伸缩结构,所述挡板的顶部与置物室的底部相互抵接,所述挡板的尺寸大于置物室的尺寸,
13.优选的,所述固定机构包括滚动槽、滚珠、转动环、第一卡块、第三活动槽、弹簧和第二卡块,所述基座的顶部固定连接有滚动槽,所述滚动槽的内部滚动连接有滚珠,所述滚珠的顶部活动连接有转动环,所述转动环的底部活动在滚动槽的外壁,所述基座的顶部且靠近滚动槽的内侧固定连接有第一卡块,所述基座的外壁开设有第三活动槽,所述第三活动槽的内部固定连接有弹簧,所述弹簧的外侧固定连接有第二卡块。
14.优选的,所述滚动槽的顶部设置有与滚珠相互适配的凹槽,所述转动环的底部设置有与滚珠相互适配的凹槽,所述第一卡块的外侧设置有与凸块相适配的凹槽,所述第二卡块的形状设置为三角状。
15.优选的,所述稳定机构包括机器人本体、稳定槽、凸块、卡板、卡槽和固定筋,所述基座的顶部卡接有机器人本体,所述机器人本体的底部开设有稳定槽,所述机器人本体的内壁固定连接有凸块,所述机器人本体的外壁通过螺栓固定连接有卡板,所述卡板外壁贯穿开设有卡槽,所述卡板的外壁焊接有固定筋。
16.优选的,所述稳定槽的尺寸与转动环的尺寸相互适配,所述卡槽内部尺寸与第二卡块尺寸相互适配。
17.与现有技术相比,本发明的有益效果是:
18.1、本发明通过电动伸缩杆通电后其输出端伸展,电动伸缩杆的输出端带动第三滚轮从收缩槽的内部向外运动,同时电动伸缩杆的输出端带动杠杆的底部向外运动,在杠杆的作用下使得电动伸缩杆的内侧端在基座的底部转动,电动伸缩杆的外侧端带动第三滚轮向下运动与地面接触,能够起到对设备支撑的作用,防止设备出现倾倒的问题,防止设备出现损伤,提高了设备的使用寿命。
19.2、本发明通过控制第一滚轮在转动杆的底部转动,在设备需要不同方向运动时,通过设备的控制使得转动杆在轴承的内部旋转,转动杆旋转后带动第一滚轮旋转后能够使得设备不同方向的运动,同时配合第二滚轮在转动槽的内部转动能够有效的使得设备向不同方向进行移动,同时通过第二滚轮能够提高设备的移动效率,提高设备的应用场景,进而提高设备的实用性。
20.3、本发明通过第一万向球带动第二摆杆摆动,第二摆杆带动第二万向球运动,通过第二万向球与第二万向槽的相互配合的作用下能够使得挡板在第二滑槽的内部向外侧滑动,挡板无法将置物室内部的润滑油抵挡,置物室内部的润滑油会通过第二活动槽滴落到第一万向球的外壁,能够对第一万向球的外壁进行润滑,防止第一万向球在设备出现倾斜时无法转动,减少本发明无法运行的问题,提高了本发明的实用性。
21.4、本发明通过旋转机器人本体使得转动环在滚珠的作用下在滚动槽的外壁转动,通过滚珠能够有效的减小机器人本体在基座的顶部的摩擦,进而提高机器人本体的使用寿命,同时提高机器人本体固定后的稳定程度,能够防止机器人本体出现无法固定的问题,提高设备在工作时的安全性。
22.5、本发明通过机器人本体带动凸块运动到第一卡块的内部,能够有效的对机器人本体进行卡接固定,且安装步骤简单快捷,进而在设备出现为题时能够快速的进行拆卸,提高了工作人员的维修效率,同时减少了工作人员的维修时劳动力成本。
23.6、本发明通过机器人本体带动卡板转动,当卡板转动到第二卡块的外壁时,卡板能够推动第二卡块向第三活动槽的内部运动并压缩弹簧,当卡板使得卡槽运动到与第二卡块相对齐后,第二卡块在弹簧伸展的作用下在第三活动槽的内部向外运动,第二卡块与卡槽的内部相互卡接,进而提高机器人本体固定在基座顶部的稳定性,防止机器人本体出现松动的情况,防止机器人本体松动而砸伤使用者,进而提高了设备工作时的安全性。
附图说明
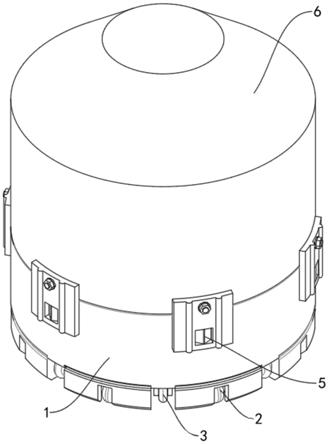
24.图1为本发明整体立体结构图;
25.图2为本发明正视结构图;
26.图3为本发明图2中a-a剖视结构图;
27.图4为本发明图3中a处放大结构图;
28.图5为本发明图3中b处放大结构图;
29.图6为本发明图3中c处放大结构图;
30.图7为本发明机器人本体底部立体结构图;
31.图8为本发明基体底部立体结构图;
32.图9为本发明基体顶部立体结构图;
33.图10为本发明基体内部立体结构图。
34.图中:
35.1、基座;
36.2、移动机构;201、轴承;202、转动杆;203、第一滚轮;204、转动槽;205、第二滚轮;
37.3、支撑机构;301、收缩槽;302、支撑杆;303、第一滑槽;304、电动伸缩杆;305、第三滚轮;306、杠杆;
38.4、控制机构;401、第一活动槽;402、电触板;403、支撑架;404、第一万向槽;405、第二活动槽;406、第二滑槽;407、置物室;408、第一万向球;409、第一摆杆;410、配重块;411、电触块;412、第二摆杆;413、第二万向球;414、挡板;415、第二万向槽;
39.5、固定机构;501、滚动槽;502、滚珠;503、转动环;504、第一卡块;505、第三活动槽;506、弹簧;507、第二卡块;
40.6、稳定机构;601、机器人本体;602、稳定槽;603、凸块;604、卡板;605、卡槽;606、固定筋。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明的保护的范围。
42.请参阅图1至图10,本发明提供一种技术方案:
43.一种行进式教育类机器人的平衡组件,包括基座1,基座1的底部设置有移动机构2,基座1的底部设置有支撑机构3,基座1的内部设置有控制机构4,基座1的外侧设置有固定机构5,基座1的顶部活动连接有稳定机构6。
44.作为本发明的一种实施例,如图1和图8所示,移动机构2包括轴承201、转动杆202、第一滚轮203、转动槽204和第二滚轮205,基座1的下表面的中部固定连接有轴承201,轴承201的中部固定连接有转动杆202,转动杆202的下端转动连接有第一滚轮203,第一滚轮203与设备使用电源电性连接,基座1底部的边缘处开设有转动槽204,转动槽204的内部转动连接有第二滚轮205,第二滚轮205在基座1底部的边缘处均匀设置有八个,第二滚轮205的尺寸大于转动槽204的尺寸。
45.工作时,因为第一滚轮203与设备使用电源电性连接,设备系统控制第一滚轮203在转动杆202的底部转动,在设备需要不同方向运动时,通过设备的控制使得转动杆202在轴承201的内部旋转,转动杆202旋转后带动第一滚轮203旋转后能够使得设备不同方向的运动,同时配合第二滚轮205在转动槽204的内部转动能够有效的使得设备向不同方向进行移动,同时通过第二滚轮205能够提高设备的移动效率,提高设备的应用场景,进而提高设备的实用性。
46.作为本发明的一种实施例,如图1、图4、图8和图10所示,支撑机构3包括收缩槽301、支撑杆302、第一滑槽303、电动伸缩杆304、第三滚轮305和杠杆306,基座1底部的边缘处开设有收缩槽301,基座1底部设置有支撑杆302,支撑杆302的底部贯穿开设有第一滑槽303,基座1的底部转动连接有电动伸缩杆304,电动伸缩杆304在基座1的底部均匀设置有八个,电动伸缩杆304的尺寸小于收缩槽301的尺寸,电动伸缩杆304输出端的外侧且靠近收缩槽301的内部转动连接有第三滚轮305,电动伸缩杆304输出端的顶部转动连接有杠杆306,杠杆306的底部滑动在第一滑槽303的内部,杠杆306的顶部与基座1的内部转动连接。
47.工作时,电动伸缩杆304通电后其输出端伸展,电动伸缩杆304的输出端带动第三滚轮305从收缩槽301的内部向外运动,同时电动伸缩杆304的输出端带动杠杆306的底部向外运动,杠杆306的顶部在基座1的底部转动,在杠杆306的作用下使得电动伸缩杆304的内侧端在基座1的底部转动,电动伸缩杆304的外侧端带动第三滚轮305向下运动与地面接触,能够起到对设备支撑的作用,防止设备出现倾倒的问题,提高了设备移动过程中的安全性,减少了设备倾倒而导致内部电路出现线路松动而无法使用,同时也防止设备出现损伤,提高了设备的使用寿命。
48.作为本发明的一种实施例,如图3、图5、图9和图10所示,控制机构4包括第一活动
槽401、电触板402、支撑架403、第一万向槽404、第二活动槽405、第二滑槽406、置物室407、第一万向球408、第一摆杆409、配重块410、电触块411、第二摆杆412、第二万向球413、挡板414和第二万向槽415,基座1的内部开设有第一活动槽401,第一活动槽401的底部固定连接与电触板402,电触板402与设备使用电源电性连接,基座1的顶部且靠近第一活动槽401的顶部通过螺栓固定连接有支撑架403,支撑架403的内部开设有第一万向槽404,第一万向槽404的上下均设置为倒角状,支撑架403的内部且靠近第一万向槽404的顶部开设有第二活动槽405,支撑架403的内部且靠近第二活动槽405的顶部开设有第二滑槽406,支撑架403的内部且靠近第二滑槽406的顶部开设有置物室407,置物室407的内部设置有润滑油,第一万向槽404的内部活动连接有第一万向球408,第一万向球408的尺寸与第一万向槽404的尺寸相互适配,第一万向球408的底部且靠近第一活动槽401的内部固定连接有第一摆杆409,第一摆杆409的转动范围与第一活动槽401的形状相互适配,第一摆杆409的下端固定连接有配重块410,第一摆杆409的底部固定连接有电触块411,电触块411与电动伸缩杆304电性连接,第一万向球408的顶部固定连接有第二摆杆412,第二摆杆412为伸缩结构,第二摆杆412的顶部固定连接有第二万向球413,第二滑槽406的内部滑动连接有挡板414,挡板414的顶部与置物室407的底部相互抵接,挡板414的尺寸大于置物室407的尺寸,挡板414下表面的中部开设有第二万向槽415,第二万向球413活动在第二万向槽415的内部。
49.工作时,当设备运动到斜坡时,在重力的作用下通过配重块410能够使得第一万向球408在第一万向槽404的内部转动,进而使得第一摆杆409向设备倾斜方向摆动,第一摆杆409带动电触块411在第一活动槽401的内部运动,当电触块411运动后与电触板402电性接触,因为电触板402与设备使用电源电性连接,进而使得电触块411通电,因为电触块411与电动伸缩杆304电性连接,使得电动伸缩杆304通电,第一万向球408带动第二摆杆412摆动,第二摆杆412带动第二万向球413运动,通过第二万向球413与第二万向槽415的相互配合的作用下能够使得挡板414在第二滑槽406的内部向外侧滑动,挡板414无法将置物室407内部的润滑油抵挡,置物室407内部的润滑油会通过第二活动槽405滴落到第一万向球408的外壁,能够对第一万向球408的外壁进行润滑,防止第一万向球408在设备出现倾斜时无法转动,减少本发明无法运行的问题,提高了本发明的实用性。
50.作为本发明的一种实施例,如图6、图7和图9所示,固定机构5包括滚动槽501、滚珠502、转动环503、第一卡块504、第三活动槽505、弹簧506和第二卡块507,基座1的顶部固定连接有滚动槽501,滚动槽501的顶部设置有与滚珠502相互适配的凹槽,滚动槽501的内部滚动连接有滚珠502,滚珠502的顶部活动连接有转动环503,转动环503的底部设置有与滚珠502相互适配的凹槽,转动环503的底部活动在滚动槽501的外壁,基座1的顶部且靠近滚动槽501的内侧固定连接有第一卡块504,第一卡块504的外侧设置有与凸块603相适配的凹槽,基座1的外壁开设有第三活动槽505,第三活动槽505的内部固定连接有弹簧506,弹簧506的外侧固定连接有第二卡块507,第二卡块507的形状设置为三角状。
51.稳定机构6包括机器人本体601、稳定槽602、凸块603、卡板604、卡槽605和固定筋606,基座1的顶部卡接有机器人本体601,机器人本体601的底部开设有稳定槽602,稳定槽602的尺寸与转动环503的尺寸相互适配,机器人本体601的内壁固定连接有凸块603,机器人本体601的外壁通过螺栓固定连接有卡板604,卡板604外壁贯穿开设有卡槽605,卡槽605内部尺寸与第二卡块507尺寸相互适配,卡板604的外壁焊接有固定筋606。
52.工作时,将稳定槽602与转动环503对其后,旋转机器人本体601使得转动环503在滚珠502的作用下在滚动槽501的外壁转动,通过滚珠502能够有效的减小机器人本体601在基座1的顶部的摩擦,进而提高机器人本体601的使用寿命,同时提高机器人本体601固定后的稳定程度,能够防止机器人本体601出现无法固定的问题,提高设备在工作时的安全性,当机器人本体601带动凸块603运动到第一卡块504的内部时,能够有效的对机器人本体601进行卡接固定,且安装步骤简单快捷,进而在设备出现为题时能够快速的进行拆卸,提高了工作人员的维修效率,同时减少了工作人员的维修时劳动力成本,与此同时机器人本体601带动卡板604转动,当卡板604转动到第二卡块507的外壁时,因为第二卡块507的形状为三角形,卡板604能够推动第二卡块507向第三活动槽505的内部运动并压缩弹簧506,当卡板604使得卡槽605运动到与第二卡块507相对齐后,第二卡块507在弹簧506伸展的作用下在第三活动槽505的内部向外运动,第二卡块507与卡槽605的内部相互卡接,进而提高机器人本体601固定在基座1顶部的稳定性,防止机器人本体601出现松动的情况,防止机器人本体601松动而砸伤使用者,进而提高了设备工作时的安全性,同时固定筋606能够对卡板604起到稳固的作用,提高卡槽605与第二卡块507卡接时的牢固性,防止卡板604出现折断而无法使用,提高了卡板604的使用寿命。
53.工作原理:启动设备,在设备工作时,因为第一滚轮203与设备使用电源电性连接,设备系统控制第一滚轮203在转动杆202的底部转动,在设备需要不同方向运动时,通过设备的控制使得转动杆202在轴承201的内部旋转,转动杆202旋转后带动第一滚轮203旋转后能够使得设备不同方向的运动,同时配合第二滚轮205在转动槽204的内部转动能够有效的使得设备向不同方向进行移动,同时通过第二滚轮205能够提高设备的移动效率,提高设备的应用场景,进而提高设备的实用性。
54.将稳定槽602与转动环503对其后,旋转机器人本体601使得转动环503在滚珠502的作用下在滚动槽501的外壁转动,通过滚珠502能够有效的减小机器人本体601在基座1的顶部的摩擦,进而提高机器人本体601的使用寿命,同时提高机器人本体601固定后的稳定程度,能够防止机器人本体601出现无法固定的问题,提高设备在工作时的安全性,当机器人本体601带动凸块603运动到第一卡块504的内部时,能够有效的对机器人本体601进行卡接固定,且安装步骤简单快捷,进而在设备出现为题时能够快速的进行拆卸,提高了工作人员的维修效率,同时减少了工作人员的维修时劳动力成本,与此同时机器人本体601带动卡板604转动,当卡板604转动到第二卡块507的外壁时,因为第二卡块507的形状为三角形,卡板604能够推动第二卡块507向第三活动槽505的内部运动并压缩弹簧506,当卡板604使得卡槽605运动到与第二卡块507相对齐后,第二卡块507在弹簧506伸展的作用下在第三活动槽505的内部向外运动,第二卡块507与卡槽605的内部相互卡接,进而提高机器人本体601固定在基座1顶部的稳定性,防止机器人本体601出现松动的情况,防止机器人本体601松动而砸伤使用者,进而提高了设备工作时的安全性,同时固定筋606能够对卡板604起到稳固的作用,提高卡槽605与第二卡块507卡接时的牢固性,防止卡板604出现折断而无法使用,提高了卡板604的使用寿命。
55.设备在自主移动时,在设备移动到有倾斜角度的斜坡时,可能会出现设备重心不稳的问题,当设备运动到斜坡时,在重力的作用下通过配重块410能够使得第一万向球408在第一万向槽404的内部转动,进而使得第一摆杆409向设备倾斜方向摆动,第一摆杆409带
动电触块411在第一活动槽401的内部运动,当电触块411运动后与电触板402电性接触,因为电触板402与设备使用电源电性连接,进而使得电触块411通电,因为电触块411与电动伸缩杆304电性连接,电动伸缩杆304通电后其输出端伸展,电动伸缩杆304的输出端带动第三滚轮305从收缩槽301的内部向外运动,同时电动伸缩杆304的输出端带动杠杆306的底部向外运动,杠杆306的顶部在基座1的底部转动,在杠杆306的作用下使得电动伸缩杆304的内侧端在基座1的底部转动,电动伸缩杆304的外侧端带动第三滚轮305向下运动与地面接触,能够起到对设备支撑的作用,防止设备出现倾倒的问题,提高了设备移动过程中的安全性,减少了设备倾倒而导致内部电路出现线路松动而无法使用,同时也防止设备出现损伤,提高了设备的使用寿命,与此同时,第一万向球408带动第二摆杆412摆动,第二摆杆412带动第二万向球413运动,通过第二万向球413与第二万向槽415的相互配合的作用下能够使得挡板414在第二滑槽406的内部向外侧滑动,挡板414无法将置物室407内部的润滑油抵挡,置物室407内部的润滑油会通过第二活动槽405滴落到第一万向球408的外壁,能够对第一万向球408的外壁进行润滑,防止第一万向球408在设备出现倾斜时无法转动,减少本发明无法运行的问题,提高了本发明的实用性。
56.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1