一种全地形履带车及其全向驱动方法
1.本发明属于机器人技术领域,具体涉及全地形履带车及其全向驱动方法。
背景技术:
2.在狭窄的空间里,全向移动是一种常见的移动方式。特别是履带式平面全向爬行器,它可以穿越不平整或泥泞的地形。由于履带与地面之间的接触面积较大,履带式平面全向爬行器能够装载重物并且向各个方向移动而不会被卡住。促进机器人的全方位运动,这对机器人在工厂、配送中心、仓库以及在灾难现场的软土地上的使用具有重要意义。本发明设计了一种全地形履带车,可进行两轴交叉驱动。履带底座上仅设置两个电机用于x和y方向的平移,并设置两个内部履带机构用于转弯。采用了防脱轨机构和锥形履带。全地形履带车可以穿越各种类型的粗糙地形。
技术实现要素:
3.本发明的目的在于提供一种全地形履带车及其全向驱动方法。
4.本发明的一种全地形履带车,其包括并排安装的两个动力模块。动力模块包括内部履带机构和外部履带机构。所述的内部履带机构包括安装支架、第二转轴和第三转轴;第二转轴与第三转轴同轴设置,并转动连接在安装支架的同一端;第二转轴和第三转轴由两个动力元件分别驱动。第二转轴上固定连接有第二带轮。第三转轴上固定有第四带轮;安装支架的另一端转动连接有第一带轮和第三带轮。第一带轮与第二带轮通过第一内部传送带传动连接;第三带轮和第四带轮通过对外传动带传动连接。
5.所述外部履带机构包括沿着对外传动带的长度方向依次排列的多个外部行进单元。外部行进单元包括外部支架、第一履轮和第一履带;外部支架与第一内部传送带固定。外部支架上转动连接有相互平行的第一传动轴和第二传动轴。第一传动轴和第二传动轴上均安装有通过第一履带连接的第一履轮。
6.第一内部传送带的运动方向与第一履带的运动方向不平行。所述外部支架上转动连接有带齿传动轮;带齿传动轮与第一传动轴或第二传动轴传动连接。对外传动带上设置有与带齿传动轮啮合传动的锯齿。
7.作为优选,所述的内部履带机构还包括第五带轮和第六带轮;第六带轮在转动连接在第三转轴上;第五带轮转动连接在机架上;第五带轮与第一带轮对齐并固定。第五带轮与第六带轮通过第二内部传送带传动连接。对外传动带位于第一内部传送带与第二内部传送带之间。外部支架与第二内部传送带的外侧面固定。
8.作为优选,所述的内部履带机构还包括第一转轴;第一转轴转动连接在安装支架上。第一带轮和第五带轮均固定在第一转轴上。第四带轮转动连接在第一转轴上。
9.作为优选,所述的安装支架上固定有第一电机和第二电机;所述的第一电机的输出轴通过第一锥齿轮机构与第二转轴传动连接;第二电机的输出轴通过第二锥齿轮机构与第三转轴传动连接。
10.作为优选,所述外部支架上转动连接有第三传动轴和第四传动轴;第三传动轴位于第一传动轴与第二传动轴之间。第四传动轴位于第三传动轴远离第二传动轴的一侧。第三传动轴、第二传动轴和第四传动轴呈v形排布。第二传动轴、第三传动轴和第四传动轴上均安装有第二履轮;三个第二履轮通过第二履带传动连接。
11.作为优选,所述第一传动轴和第二传动轴上均间隔设置有两个第一履轮。第一传动轴上的两个第一履轮与第二传动轴上的两个第一履轮分别通过间隔设置的两条第一履带连接。第二履带设置在两条第一履带之间。
12.作为优选,所述第一内部传送带的运动方向与第一履带的运动方向相互垂直。
13.作为优选,所述外部支架上间隔设置有两个带齿传动轮;对外传动带的两侧边缘均设置有锯齿;两个带齿传动轮分别位于对外传动带的两侧。两个带齿传动轮与对外传动带的两侧的锯齿分别啮合。
14.作为优选,两个对外传动带通过齿轮或其他传动结构进行反向等速传动。
15.作为优选,外部支架的转角位置安装有第一张紧轮;第一张紧轮抵住第二履带的外侧面靠近第二传动轴的位置。
16.作为优选,所有的履轮均采用双排轮齿结构。
17.该全地形履带车的全向驱动方法,具体如下:
18.设定第一履带和第二履带的运动方向为前后方向;设定第一内部传送带的运动方向为左右方向。
19.控制单个动力模块沿前后方向行进的过程为:该动力模块中的第一内部传送带静止,仅对外传动带转动,所有外部行进单元上的第一履带进行同步运动,且所有外部行进单元在安装支架上的位置保持静止;使得动力模块沿前后方向运动。
20.控制单个动力模块沿左右方向行进的过程为:该动力模块中的第一内部传送带和对外传动带同步等速转动,所有外部行进单元在第一内部传送带的带动下,绕安装支架运动,且第一履带在外部行进单元中保持相对静止。使得动力模块沿左右方向运动。
21.控制单个动力模块沿倾斜方向行进的过程为:该动力模块中的第一内部传送带与对外传动带不同的转速或转向进行运动,外部行进单元绕安装支架运动,同时第一履带相对于外部行进单元运动,使得动力模块向倾斜方向运动。
22.当全地形履带车需要向前后方向、左右方向或倾斜方向运动时,两个动力模块进行沿指定方向的同步运动。
23.当全地形履带车进行转向时,两个动力模块进行异步的左右方向运动,使得全地形履带车发生旋转。
24.本发明具有的有益效果是:
25.1.本发明能够沿任意方向进行运动,且能够进行原地转向,并将所有动力元件均集成在履带车的内部,通过内部传动带与对外传动带的配合运动,实现履带车向不同方向的运动驱动。此外,本发明通过单个动力元件就实现了多个外部行进单元的同步运动,简化了履带车的结构复杂度。
26.2.本发明提供的全地形履带车的四周均覆盖有履带,提高了其在复杂地形的通过能力,配合其原地转向的能力,能够穿越狭窄且崎岖地形进行搜索和救援。
27.3、本发明可以在例如雪地、触觉铺路、鹅卵石、草、砾石、沙子和木屑等崎岖的地形
上实现全向运动。本发明中的履轮和履带均采用双排轮齿结构,使得履带更不易脱轨。
附图说明
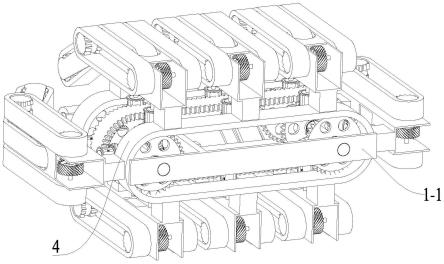
28.图1为本发明的整体结构示意图;
29.图2为本发明中单个动力模块的示意图;
30.图3为本发明的大履带示意图;
31.图4位本发明的h形支架示意图;
32.图5为本发明的小履带示意图;
33.图6为本发明的小履带剖视图。
具体实施方式
34.以下结合附图对本发明作进一步说明。
35.如图1-4所示,一种全地形履带车,包括相互对称且并排固定在一起的两个动力模块。两个动力模块中的安装支架1-1固定在一起。动力模块包括内部履带机构1和外部履带机构5;内部履带机构1用于转向和沿前后方向进行直线运动;所述的外部履带机构5环绕在内部履带机构1的外侧,所述的外部履带机构5能沿直线运动。
36.内部履带机构1包括安装支架1-1、第一转轴1-2、第二转轴1-3、第三转轴1-4和内部传送组件4;第二转轴1-3与第三转轴1-4同轴设置,并转动连接在安装支架1-1的同一端;第一转轴1-2转动连接在安装支架1-1的另一端。所述的安装支架1-1上固定有第一电机3-1和第二电机3-2;所述的第一电机3-1的输出轴通过第一锥齿轮机构3-3与第二转轴1-3传动连接;第二电机3-2的输出轴通过第二锥齿轮机构3-4与第三转轴1-4连接。由此实现,第二转轴1-3和第三转轴1-4的独立驱动。
37.第一转轴1-2的两端分别固定连接有第一带轮1-5和第五带轮1-9;第一转轴1-2的中部通过轴承转动连接有一个第三带轮1-7;第二转轴1-3上固定连接有第二带轮1-6;第三转轴1-4上固定连接有第四带轮1-8,转动连接有第六带轮1-10;第一带轮1-5、第三带轮1-7、第五带轮1-9与第二带轮1-6、第四带轮1-8、第六带轮1-10分别对齐。内部传送组件4包括相互平行且依次间隔排列的第一内部传送带4-1、对外传动带4-2和第二内部传送带4-3;第一带轮1-5与第二带轮1-6通过第一内部传送带4-1传动连接;第三带轮1-7和第四带轮1-8通过对外传动带4-2传动连接;第五带轮1-9与第六带轮1-10通过第二内部传送带4-3传动连接。当第二转轴1-3在第一电机的驱动下转动时,带动第一内部传送带4-1和第二内部传送带4-3同步运动;当第三转轴1-4在第二电机的驱动下转动时,带动对外传动带4-2运动。内部传送带与对外传动带4-2的运动相互独立。
38.外部履带机构5包括沿着对外传动带4-2的长度方向依次均匀排列呈环形的多个外部行进单元。外部行进单元呈钝角的v型结构,包括外部支架5-1、第一履轮5-2和第一履带5-3;所述的外部支架5-1呈v形,且为中空对称结构,外部支架5-1上间隔固定有两个垫块5-4。两个垫块5-4与第一内部传送带4-1和第二内部传送带4-3的外侧面分别固定,使得外部行进单元能够随第一内部传送带4-1和第二内部传送带4-3进行移动,实现全地形履带车的行进。
39.外部支架5-1上转动连接有第一传动轴5-5、第二传动轴5-6、第三传动轴5-7和第
四传动轴5-8;第一传动轴5-5和第三传动轴5-7分别转动连接在外部支架5-1的两端;第二传动轴5-6和第四传动轴5-8均转动连接在外部支架5-1的中部;第三传动轴5-7、第二传动轴5-6和第四传动轴5-8呈v形排布。第一传动轴5-5和第二传动轴5-6的两端均固定有第一履轮5-2;第一传动轴5-5和第二传动轴5-6相同端上的第一履轮5-2通过第一履带5-3连接,形成相互对齐且间隔设置两个直线履带结构。第一履轮5-2和第一履带5-3采用相互匹配的双排传动齿结构。第二传动轴5-6、第三传动轴5-7和第四传动轴5-8的中部均固定有第二履轮5-9;呈v形排布的三个第二履轮5-9的外周通过第二履带5-10传动连接。第二履带5-10设置在两条第一履带5-3之间。第二履带5-10整体呈v形,且转折处与第一履带5-3的外端部对齐。
40.安装支架1-1上的各转轴的轴线平行于两个动力模块的排列方向。外部支架5-1上的各传动轴的轴线垂直于两个动力模块的排列方向。由此使得第一履带5-3和第二履带5-10的运动带动全地形履带车平行于两个动力模块的排列方向运动运动;第一内部传送带4-1和第二内部传送带4-3的运动带动全地形履带车沿垂直于两个动力模块的排列方向运动运动。
41.工作时,外部履带机构5的形状为钝角v型结构,有利于外部履带机构5爬越障碍物,有利于外部履带机构5爬坡,以及在高低不平的地面运动,从而增加了全地形履带车爬越障碍物和在高低不平的地面运动的适应能力。外部履带机构5采用带有双排轮齿的履轮和履带,能够使得履带更不易脱落,从而增大全地形履带车长时间运行的能力。
42.如图4、5和6所示,所述的外部支架5-1上转动连接有两个带齿传动轮5-11;其中一个带齿传动轮5-11的轮轴与第一传动轴5-5的中部通过斜齿轮机构传动连接。对外传动带4-2的两侧边缘设置有连成环形的锯齿5-12。带齿传动轮5-11上的轮齿与对外传动带4-2上的锯齿5-12相匹配,能够啮合传动。两个带齿传动轮5-11分别位于对外传动带4-2的两侧。两个带齿传动轮5-11与对外传动带4-2的两侧的锯齿5-12啮合。当对外传动带4-2相对于外部履带机构5运动时,将同时带动所有的带齿传动轮5-11转动。进而带动第一履带和第二履带运动,实现全地形履带车的移动。
43.工作时,内部履带机构1的对外传动带4-2运动通过锯齿5-12与带齿传动轮5-11啮合能够将对外传动带4-2的动力传递给每一个小履带机构,带齿传动轮5-11的轴通过斜齿轮带动第二传动轴5-6转动,第二传动轴5-6通过履带机构将动力传递给第三传动轴5-7和第四传动轴5-8,从而带动外部履带机构5的第一履带5-3运动,使每一个外部履带机构5不需要携带动力源,也能够同步向前或向后运动。每个外部履带机构5上设置两个带齿传动轮5-11,两个带齿传动轮5-11安装在对外传动带4-2两侧,能够保证对外传动带4-2上的锯齿5-12与带齿传动轮5-11上的凹槽的啮合更不易脱落,增强了外部履带机构5的运动能力和负载能力,增强了全地形履带车及的运动能力和负载能力。
44.作为一种可选的进一步优化方案,两个对外传动带4-2通过齿轮或其他传动结构进行反向等速传动。
45.如图5和图6所示,外部支架5-1的转角位置安装有第一张紧轮6;第一张紧轮6抵住第二履带5-10的外侧面靠近第二传动轴5-6的位置,使得第二履带5-10的内侧能够紧贴第二传动轴5-6上的第二履轮5-9,使第二履带5-10不易脱落,增大了外部履带机构5的传动能力和负载能力,也增大了内部履带机构1的传动能力和负载能力。
46.作为一种可选的技术方案,第一内部传送带4-1、对外传动带4-2和第二内部传送带4-3的内侧均设置有第二张紧轮,用以同步张紧第一内部传送带4-1、对外传动带4-2和第二内部传送带4-3。工作时,第二张紧轮能够使内部履带机构上的内部传送组件4更不易脱落,能够促进全地形履带车更加平稳运行。
47.如图3所示,所述的内部履带机构1的外侧安装有波纹状且不影响第一内部传送带4-1、对外传动带4-2和第二内部传送带4-3运动的挡水盖板。工作时,波纹状的挡水盖板具有增大内部履带机构1的防水性能的作用。
48.工作时,若全地形履带车需要原地自转,则两个内部履带机构1的第一电机3-1和第二电机3-2的主轴旋转方向均相同,使两个内部履带机构1的内部传送组件4转动方向相反,从而使全地形履带车原地自转。当全地形履带车需要沿直线运动时,左侧内部履带机构1上的第一电机3-1和第二电机3-2均正转,右侧内部履带机构上1的第一电机3-1和第二电机3-2均反转,从而使全地形履带车沿直线运动。
49.工作时,工作时,当全地形履带车需要原地自转时,两个动力模块内的第一内部传送带4-1、对外传动带4-2和第二内部传送带4-3反向转动,使全地形履带车原地自转。
50.当全地形履带车需要沿直线运动时;两个动力模块内的第一内部传送带4-1、对外传动带4-2和第二内部传送带4-3同向等速转动,使全地形履带车沿直线运动。外部履带机构5的形状为钝角v型结构,有利于外部履带机构5爬越障碍物,有利于外部履带机构5爬坡,有利于外部履带机构5在高低不平的地面运动,从而增加了全地形履带车爬越障碍物和在高低不平的地面运动的适应能力。
51.外部履带机构5采用第一履轮5-2和第一履带5-3均采用双排轮齿结构能够使外部履带机构5的履带更不易脱落,从而增大全地形履带车长时间运行的能力。内部履带机构1的对外传动带4-2运动通过锯齿5-12与带齿传动轮5-11啮合能够将对外传动带4-2的动力传递给每一个外部行进单元,带齿传动轮5-11的轴通过斜齿轮带动第二传动轴5-6转动,第二传动轴5-6通过履带机构将动力传递给第三传动轴5-7和第四传动轴5-8,从而带动外部履带机构5的第一履带5-3和第二履带5-10运动,使所有外部履带机构5均不需要携带动力源,也能够同步向前或向后运动。每个外部履带机构5上设置两个带齿传动轮5-11,两个带齿传动轮5-11安装在对外传动带4-2的相反侧,能够保证对外传动带4-2上的锯齿5-12与带齿传动轮5-11上的凹槽的啮合更不易脱落,增强了外部履带机构5的运动能力和负载能力,增强了全地形履带车及的运动能力和负载能力。第一张紧轮6能够使第二履带5-10的内侧紧贴第一履轮5-2,使第二履带5-10不易脱落,增大了外部履带机构5的传动能力和负载能力,也增大了内部履带机构1的传动能力和负载能力。第二张紧轮能够使内部履带机构上的内部传送组件4更不易脱落,能够促进全地形履带车更加平稳运行。波纹状的挡水盖板具有增大内部履带机构1的防水性能的作用。
52.该全地形履带车的全向驱动方法,具体如下:
53.设定第一履带和第二履带的运动方向为前后方向;设定第一内部传送带4-1、第二内部传送带4-3的运动方向为左右方向。
54.控制单个动力模块沿前后方向行进的过程为:该动力模块中的第一内部传送带4-1和第二内部传送带4-3静止,仅对外传动带4-2转动,所有外部行进单元上的第一履带和第二履带均进行同步运动,且所有外部行进单元在安装支架1-1上的位置保持静止;使得动力
模块沿前后方向运动。
55.控制单个动力模块沿左右方向行进的过程为:该动力模块中的第一内部传送带4-1、第二内部传送带4-3和对外传动带4-2同步等速转动,所有外部行进单元在第一内部传送带4-1、第二内部传送带4-3的带动下,绕安装支架1-1运动,且第一履带和第二履带在外部行进单元中保持相对静止。使得动力模块沿左右方向运动。
56.控制单个动力模块沿倾斜方向(左右方向与前后方向之间的一个方向)行进的过程为:该动力模块中的第一内部传送带4-1、第二内部传送带4-3和对外传动带4-2均转动,且对外传动带4-2的转动速度与第一内部传送带4-1、第二内部传送带4-3不一致时,外部行进单元绕安装支架1-1运动,同时第一履带和第二履带相对于外部行进单元运动,使得动力模块根据履带与内部传送带的运动速度之比,向倾斜方向运动。
57.当全地形履带车需要向前后方向、左右方向或倾斜方向运动时,两个动力模块进行沿指定方向的同步运动。
58.当全地形履带车进行转向时,两个动力模块进行异步的左右方向运动,包括两个动力模块的其中一个静止,另一个向左或向右运动、两个动力模块的其中一个向左运动,另一个向右运动、两个动力模块向相同的左右方向运动,且运动速度不一致。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1