转向驱动桥底盘四轮转向AGV的转向轮标定方法与流程
:本发明属于agv车轮标定,具体地说,尤其涉及一种转向驱动桥底盘四轮转向agv的转向轮标定方法。
背景技术
0、
背景技术:
1、现有技术中汽车四轮定位的方式是使用3d四轮定位仪对轮胎进行定位,测量原理是将四个目标反光板安装在车辆的四个轮辋之上,滚动车轮,由摄像机对目标反光板上的几何图形进行连续拍摄,通过计算机对几何图形的变化进行分析运算,得出车轮及底盘等的相应定位参数,再由显示屏进行显示。
2、现有技术存在的缺点:1、笨重、灵活性不强,举升机、四轮定位仪的部署要占用固定空间,不具备随时随地实施的可能性;2、举升机尺寸固定,难以兼顾不同轴距、轮距的agv产品;3、工程机械桥只需要调整初始转角,无需调整倾角束角,用3d四轮定位仪存在大量功能冗余。
技术实现思路
0、
技术实现要素:
1、本发明要解决的技术问题是克服现有技术的不足,提供了一种转向驱动桥底盘四轮转向agv的转向轮标定方法,其需求工具少,随时实施,维护方便,在客户现场维修时可以因地制宜进行重新标定,不必托运其他设备。
2、为了实现上述目的,本发明是采用以下技术方案实现的:
3、一种转向驱动桥底盘四轮转向agv的转向轮标定方法,包括以下步骤:
4、步骤一:调整转向机构回到中间点位置;
5、步骤二:定位轮胎方向与车架方向平行;
6、步骤三:定位左右轮胎之间平行;
7、步骤四:定位前后轮同侧轮胎平行;
8、步骤五:重置编码器零点;
9、步骤六:测试微调编码器连接杆;
10、步骤七:调节限位。
11、优选地,所述步骤一的操作方式及测量方法为:测量右侧油缸转向臂长度a和左侧油缸转向臂长度b,给液压比例阀直接输入模拟量信号调节转向,使a=b,保证转向臂处于中间位置。
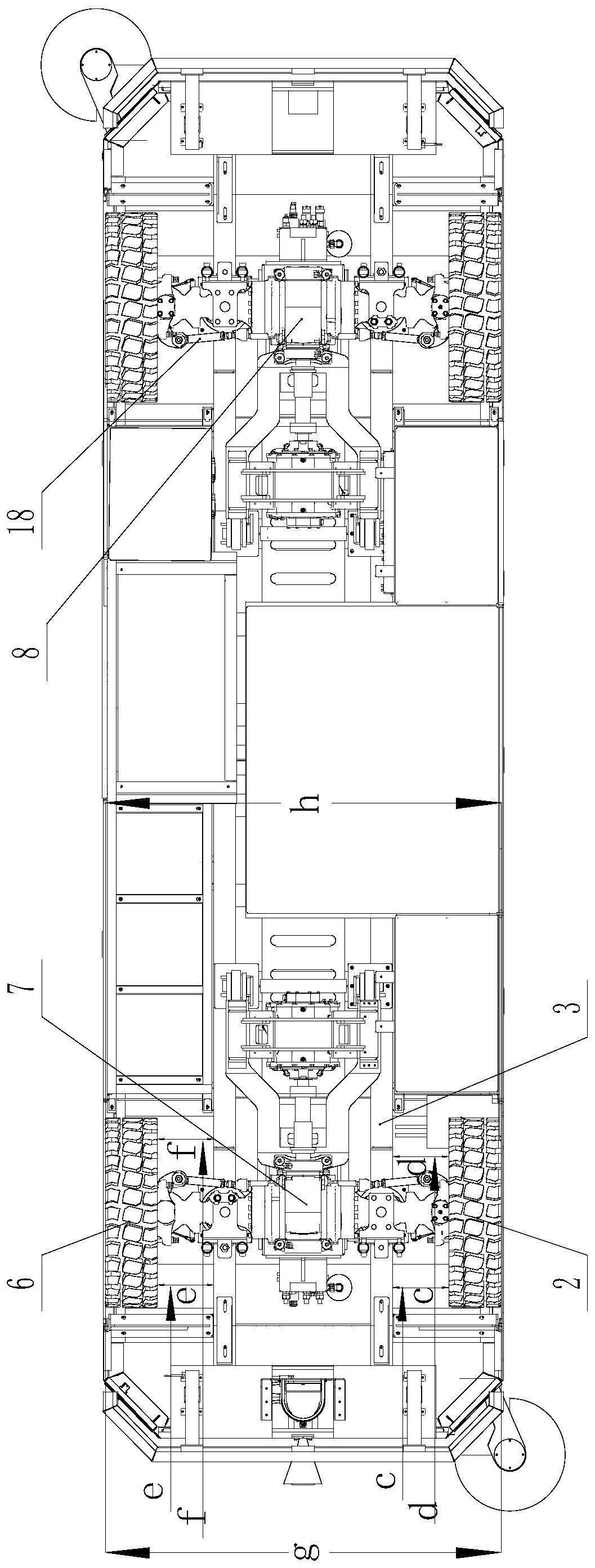
12、优选地,所述步骤二的操作方式及测量方法为:测量一侧的轮胎a的前边缘到主梁的距离c和轮胎a的后边缘到主梁的距离d,并调节第一横拉杆调节螺母,使c=d,保证一侧的轮胎a与车身平行;测量另一侧的轮胎b的前边缘到主梁的距离e和轮胎b的后边缘到主梁的距离f,并调节第二横拉杆调节螺母,使e=f,保证另一侧的轮胎b与车身平行。
13、优选地,所述步骤三的操作方式及测量方法为:测量轮胎a和轮胎b之间的前边缘距离 g和后边缘距离h,并调整第二横拉杆调节螺母,使g=h,保证同轴的轮胎a和轮胎b平行。
14、优选地,所述步骤四的操作方式及测量方法为:使用激光水平仪将线打在前后同侧轮胎的底部色标线j或色标线k,或在凹槽m上,调整激光水平仪位置使激光线与前轮色标线j、色标线k或凹槽m平行,以前桥的轮胎a和轮胎b为标准调整后桥上的转向横拉杆使前后同侧轮胎色标线或凹槽与激光线平行,保证前后同侧轮胎平行。
15、优选地,所述步骤五的操作方式及测量方法为:重置编码器的零点为当前位置。
16、优选地,所述步骤六的操作方式及测量方法为:前桥以左轮编码器数据为零点采样数据,后桥以右轮编码器为零点采样数据,转向时以内轮编码器数据为采样数据,完成液压转向的车轮角度控制。
17、优选地,所述步骤七的操作方式及测量方法为:控制液压信号输入,将前桥和后桥的轮胎分别向左右方向打到底,记录四个轮左右转向角度极限值,根据前桥和后桥的最大机械角度设定机械限位角度,调整前桥或后桥左右转向的前后限位的第一后限位螺栓、第二后限位螺栓、第三后限位螺栓和第四后限位螺栓,使四个轮胎左右转向限位角度相同,且系统自动设定的最大控制角度设定值应小于机械限位角度。
18、优选地,还包括落地测试,所述落地测试的操作方式及测量方法为:根据直行的前后轮横向偏移微调前后轮角度,在转向机构回中的条件下,将前桥的左侧编码器与转向随动杆上的双头螺栓上的第二调节螺母拧紧连接,并将后桥的右侧编码器与转向随动杆上的双头螺栓上的第一调节螺母拧紧连接,此时因转向控制轮胎自回位到编码器零点,第一调节螺母或第二调节螺母会让轮胎随动,多次测试直到满足标准直行15m前后轮横向偏移<5cm。
19、与现有技术相比,本发明的有益效果是:
20、1、本发明解决了多桥转向底盘agv车轮初始角度标定的需求,液压转向控制既可以通过直接输出比例阀模拟量,也可以直接给定目标转角实现,其需求工具少,随时实施,维护方便,在客户现场维修时可以因地制宜进行重新标定,不必托运其他设备;
21、2、灵活性强,不受车体尺寸限制,适应各种尺寸重载agv,对于各种轮距、轴距的车型都可以操作,如果使用3d四轮定位的话会受尺寸限制,通常重载agv的长度在5m到20m 之间,自重在3吨到20吨之间,对于这些特型载具来说需要专门定制特定尺寸3d四轮定位设备,定制交货周期长成本高,会拖延项目进度,而本发明除桁车起重能力限制外并不受车体尺寸限制,具备快速部署实施的能力;
22、3、不占用特定空间,本发明使用工具简单,无需现场布线、无中大型设备,无需预留维修车位。
技术特征:
1.一种转向驱动桥底盘四轮转向agv的转向轮标定方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的转向驱动桥底盘四轮转向agv的转向轮标定方法,其特征在于:所述步骤一的操作方式及测量方法为:测量右侧油缸转向臂长度a和左侧油缸转向臂长度b,给液压比例阀直接输入模拟量信号调节转向,使a=b,保证转向臂(1)处于中间位置。
3.根据权利要求2所述的转向驱动桥底盘四轮转向agv的转向轮标定方法,其特征在于:所述步骤二的操作方式及测量方法为:测量一侧的轮胎a(2)的前边缘到主梁(3)的距离c和轮胎a(2)的后边缘到主梁(3)的距离d,并调节第一横拉杆调节螺母(4),使c=d,保证一侧的轮胎a(2)与车身平行;测量另一侧的轮胎b(6)的前边缘到主梁(3)的距离e和轮胎b(6)的后边缘到主梁(3)的距离f,并调节第二横拉杆调节螺母(5),使e=f,保证另一侧的轮胎b(6)与车身平行。
4.根据权利要求3所述的转向驱动桥底盘四轮转向agv的转向轮标定方法,其特征在于:所述步骤三的操作方式及测量方法为:测量轮胎a(2)和轮胎b(6)之间的前边缘距离g和后边缘距离h,并调整第二横拉杆调节螺母(5),使g=h,保证同轴的轮胎a(2)和轮胎b(6)平行。
5.根据权利要求4所述的转向驱动桥底盘四轮转向agv的转向轮标定方法,其特征在于:所述步骤四的操作方式及测量方法为:使用激光水平仪将线打在前后同侧轮胎的底部色标线j或色标线k,或在凹槽m上,调整激光水平仪位置使激光线与前轮色标线j、色标线k或凹槽m平行,以前桥(7)的轮胎a(2)和轮胎b(6)为标准调整后桥(8)上的转向横拉杆(18)使前后同侧轮胎色标线或凹槽与激光线平行,保证前后同侧轮胎平行。
6.根据权利要求5所述的转向驱动桥底盘四轮转向agv的转向轮标定方法,其特征在于:所述步骤五的操作方式及测量方法为:重置编码器(9)的零点为当前位置。
7.根据权利要求6所述的转向驱动桥底盘四轮转向agv的转向轮标定方法,其特征在于:所述步骤六的操作方式及测量方法为:前桥(7)以左轮编码器数据为零点采样数据,后桥(8)以右轮编码器为零点采样数据,转向时以内轮编码器数据为采样数据,完成液压转向的车轮角度控制。
8.根据权利要求7所述的转向驱动桥底盘四轮转向agv的转向轮标定方法,其特征在于:所述步骤七的操作方式及测量方法为:控制液压信号输入,将前桥(7)和后桥(8)的轮胎分别向左右方向打到底,记录四个轮左右转向角度极限值,根据前桥(7)和后桥(8)的最大机械角度设定机械限位角度,调整前桥(7)或后桥(8)左右转向的前后限位的第一后限位螺栓(14)、第二后限位螺栓(15)、第三后限位螺栓(16)和第四后限位螺栓(17),使四个轮胎左右转向限位角度相同,且系统自动设定的最大控制角度设定值应小于机械限位角度。
9.根据权利要求8所述的转向驱动桥底盘四轮转向agv的转向轮标定方法,其特征在于:还包括落地测试,所述落地测试的操作方式及测量方法为:根据直行的前后轮横向偏移微调前后轮角度,在转向机构回中的条件下,将前桥(7)的左侧编码器与转向随动杆(10)上的双头螺栓(13)上的第二调节螺母(12)拧紧连接,并将后桥(8)的右侧编码器与转向随动杆(10)上的双头螺栓(13)上的第一调节螺母(11)拧紧连接,此时因转向控制轮胎自回位到编码器零点,第一调节螺母(11)或第二调节螺母(12)会让轮胎随动,多次测试直到满足标准直行15m前后轮横向偏移<5cm。
技术总结
本发明公开了一种转向驱动桥底盘四轮转向AGV的转向轮标定方法,其属于AGV车轮标定技术领域。它解决了现有技术中传统AGV转向轮标定方法存在的灵活性差、标定效果差的缺陷。其主体结构包括以下步骤:步骤一:调整转向机构回到中间点位置;步骤二:定位轮胎方向与车架方向平行;步骤三:定位左右轮胎之间平行;步骤四:定位前后轮同侧轮胎平行;步骤五:重置编码器零点;步骤六:测试微调编码器连接杆;步骤七:调节限位。本发明主要用于AGV转向轮标定。
技术研发人员:管聪聪,邱峰,陈博,朱建华,王继东,陈明全
受保护的技术使用者:临沂临工智能信息科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!