用于车辆的转向组件的制作方法
1.本发明涉及一种用于车辆的转向组件。此外,本发明涉及一种车辆。
2.本发明可以应用于重型车辆,诸如卡车、公共汽车和建筑设备。虽然将关于卡车描述本发明,但是本发明不限于这种特定车辆,而是也可以用于其它车辆,诸如作业机器、小汽车或其它类型的车辆。
背景技术:
3.车辆通常配备有一个或多个转向组件,以控制车辆的两个或更多个车轮的转向角。
4.期望提高用于使车辆转向的转向组件的通用性,使得系统可以被以直接方式调整到各个驾驶场景。
技术实现要素:
5.本发明的目的在于提供一种用于车辆的转向组件,其车轮的转向可以被以直接方式被调整到不同的驾驶场景,同时将转向组件的成本保持在合理的范围内。
6.该目的通过根据本发明所述的转向组件实现。
7.因此,本发明的第一方面涉及一种用于车辆的转向组件。车辆包括第一、第二、第三和第四车轮。转向组件包括第一转向致动器和第二转向致动器,所述第一转向致动器具有第一致动构件,所述第二转向致动器具有第二致动构件。
8.第一致动构件连接到第一车轮和第二车轮中的每一个,并由此适于控制该第一车轮和第二车轮中的每一个的转向角。第二致动构件连接到第三车轮和第四车轮中的每一个,并由此适于控制该第三车轮和第四车轮中的每一个的转向角。
9.转向组件包括连接布置。第一和第二转向致动器经由连接布置彼此连接,使得:
[0010]-当指示第一致动构件与第二致动构件之间的相对运动量的相对运动参数在预定的相对运动范围内时,连接布置允许第一致动构件和第二致动构件彼此独立地运动,并且
[0011]-当相对运动参数在预定的相对运动范围之外时,连接布置在第一致动构件和第二致动构件之间传递运动。
[0012]
根据上述内容的转向组件意味着,例如,车辆的第一与第三车轮之间的相对转向角差可以根据当前或预期驾驶场景进行调整,而不是固定的,例如在组装承载转向组件的车辆时或在服务站处进行调整。此外,由于上述转向组件还包括连接布置,这意味着即使第一和第二转向致动器中的一个将停止按预期工作,第一至第四车轮中的每一个也可以被转向。因而,根据上述内容的转向组件意味着在调整被转向车轮之间的相对转向角以及通过连接布置提供适当的转向冗余的可能性方面的通用性。此外,由于上述两个特性,即适当的通用性和冗余性,可以通过一种包括两个转向组件的系统来获得,因此可以以成本有效的方式获得这两个特性。
[0013]
为了完整起见,应注意,转向组件不一定需要确定相对运动参数。相反,如将在说
明中例证的,连接布置可以是具有游隙等的机械系统,只要相对运动低,即当相对运动参数在预定的相对运动范围内时,该机械系统就允许致动构件之间的相对运动。
[0014]
本文中使用的表述“连接布置允许第一致动构件和第二致动构件彼此独立地运动”旨在叙述连接布置使得当相对运动参数在预定的相对运动范围内时,连接布置不在第一致动构件与第二致动构件之间传递任何运动。
[0015]
可选地,预定的相对运动范围包括第一致动构件与第二致动构件之间的零相对运动。因此,预定的相对运动范围可以与致动构件之间的相对小的相对运动有关。
[0016]
可选地,预定的相对运动范围对应于第一车轮的第一转向角与第三车轮的第三转向角之间的转向角差的预定的转向角差范围。预定的转向角差范围由预定的上端点值和预定的下端点值限定。因此,预定相对运动范围可以链接到转向角差,从而意指用于预定相对运动范围的适当参考。
[0017]
可选地,预定的上端点值在0.5
°
至5
°
的范围内,优选地在1
°
至3
°
的范围内。
[0018]
可选地,预定的下端点值在-5
°
至-0.5
°
的范围内,优选地在-3
°
至-1
°
的范围内。
[0019]
可选地,第一转向致动器包括连接到第一致动构件的第一可枢转轴,并且第二转向致动器包括连接到第二致动构件的第二可枢转轴。连接布置包括可枢转地连接到第一可枢转轴的第一连接部和可枢转地连接到第二可枢转轴的第二连接部。上述实施方式意味着可以以节省空间的方式实现连接布置。
[0020]
本文中使用的术语“可枢转地连接”可以例如涉及这样的连接,即第一连接部被连接到第一可枢转轴,使得当第一可枢转轴枢转时,第一连接部也枢转。作为非限制性示例,第一连接部和第一可枢转轴可以彼此刚性连接,可替选地,第一连接部和第一可枢转轴可以经由一个或多个元件连接,诸如经由一个或多个齿轮连接,以将枢转运动从第一连接部传递到第一可枢转轴,反之亦然。为了完整起见,应注意,上述对“可枢转地连接”的例证性解释也适用于上述“第二连接部可枢转地连接到第二可枢转轴”的特征。
[0021]
可选地,连接布置包括齿轮布置,该齿轮布置适于改变第一连接部相对于第一可枢转轴的枢转方向或第二连接部相对于第二可枢转轴的枢转方向。齿轮布置意味着两个相似或甚至相同的转向组件可以被用于第一和第二转向组件,并且致动器之间的旋转方向的任何差异可由齿轮布置适应。
[0022]
可选地,连接布置包括将第一连接部和第二连接部连接的枢转接头。枢转接头使得当第一连接部与第二连接部之间的相对枢转在预定的相对枢转范围内时,该枢转接头允许第一连接部与第二连接部之间的相对枢转运动,并且使得当第一连接部与第二连接部之间的相对枢转在预定的相对枢转范围之外时,该枢转接头在第一连接部与第二连接部之间传递枢转运动。枢转接头意味着成本和空间有效的实施方式,以便获得连接布置的期望特性。
[0023]
可选地,预定的相对枢转范围包括第一连接部与第二连接部之间的零相对枢转。因此,预定的相对枢转范围可以与连接部之间的相对小的相对枢转运动有关。
[0024]
可选地,车辆具有在与车辆的预期行驶方向平行的纵向方向上的纵向延伸部,车辆进一步具有在垂直于纵向方向的横向方向上的横向延伸部,车辆具有在纵向方向上延伸并且位于车辆的横向中心的纵向中心线,第一和第二车轮中的每一个位于纵向中心线的一侧,而第三和第四车轮中的每一个位于纵向中心线的相对侧。因此,每个转向致动器可以控
制位于车辆同一侧的车轮的转向角。这意味着在各种条件下(例如,在直行时)控制车轮转向角的适当可能性,以便使车辆的能耗保持适当地低。
[0025]
可选地,车辆具有在平行于车辆的预期行驶方向的纵向方向上的纵向延伸部,车辆进一步具有在垂直于纵向方向的横向方向上的横向延伸部,车辆具有在横向方向上延伸并且位于车辆的纵向中心的横向中心线,第一和第二车轮中的每一个位于横向中心线的一侧,而第三和第四车轮中的每一个位于横向中心线的相对侧。这意味着在各种条件下(例如,在转弯时)控制车轮的转向角的适当可能性。
[0026]
可选地,第一致动构件是第一连杆臂,而第二致动构件是第二连杆臂。
[0027]
可选地,第一致动构件经由第一联杆连接到第一车轮并经由第二联杆连接到第二车轮,第二致动构件经由第三联杆连接到第三车轮并经由第四联杆连接到第四车轮。联杆的使用意味着用于转向控制的空间和成本有效的组件。
[0028]
可选地,第一联杆连接到第一车轮的第一转向臂,第二联杆连接到第二车轮的第二转向臂,第三联杆连接到第三车轮的第三转向臂,并且第四联杆连接到第四车轮的第四转向臂。
[0029]
可选地,转向组件适于控制第一车轮的第一转向角和第三车轮的第三转向角,从而在第一转向角与第三转向角之间获得预定的转向角差。
[0030]
可选地,转向组件适于确定指示车辆的当前驾驶条件的信息并且基于指示当前驾驶条件的该信息来确定预定的转向角差。上述可能性意味着可以以通用方式调整预定的转向角差。
[0031]
可选地,转向组件适于确定第一联杆、第二联杆、第三联杆和第四联杆中的每一个中的负载,并确定预定的转向角差,使得这些负载的组合,优选地这些负载之和等于或低于预定的负载阈值。当确定车轮的转向角在某些条件(诸如车辆直线向前行驶的驾驶条件)下是否合适时,联杆负载可以提供有用的信息,这是因为这样的负载可以指示是否有任何一个车轮经历了传播到联杆的不期望的滚动阻力。
[0032]
可选地,预定的负载阈值至少基于车辆的预期行驶方向,优选地还基于车辆的预期速度来确定。
[0033]
可选地,转向组件包括转向控制组件,优选地,转向控制组件包括方向盘。
[0034]
可选地,转向控制组件适于向第一转向致动器发出第一转向请求信号,第一转向致动器适于向第二转向致动器发出第二转向请求信号。
[0035]
可选地,转向控制组件适于向第一转向致动器发出第一转向请求信号并向第二转向致动器发出第二转向请求信号。
[0036]
本发明的第二方面涉及一种包括根据本发明第一方面所述的转向组件的车辆。
[0037]
本发明的进一步优点和有利特征在以下描述和从属权利要求中公开。
附图说明
[0038]
参考附图,下面对作为示例引用的本发明的实施例进行更详细的描述。
[0039]
在附图中:
[0040]
图1示意性地示出了车辆;
[0041]
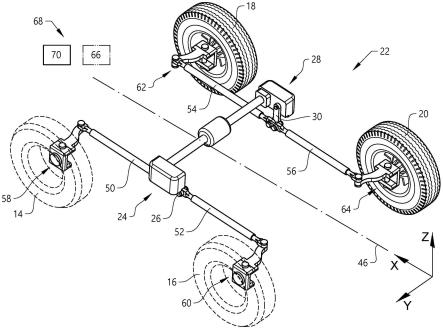
图2a示意性地示出了本发明的转向组件的实施例;
[0042]
图2b示出了图2a的实施例的一部分;以及
[0043]
图3示意性地示出了本发明的转向组件的另一实施例。
具体实施方式
[0044]
下面将关于卡车10形式的车辆描述本发明,诸如图1中所示的卡车。卡车10应被视为可以包括根据本发明的转向组件的车辆的示例。
[0045]
然而,本发明可以在多种不同类型的车辆中实施。仅作为示例,本发明可以在卡车、牵引车、小汽车、公共汽车、诸如轮式装载机之类的作业机器,或任何其它类型的建筑设备中实施。
[0046]
此外,车辆10具有在与预期行驶方向平行的纵向方向x上的纵向延伸部,和在与纵向方向垂直的侧向方向y上的侧向延伸部。此外,如图1中所示,车辆10还具有竖直方向z上的竖直延伸部,并且侧向方向y垂直于纵向方向x和竖直方向z中的每一个。
[0047]
车辆通常适于由地面12支撑并且通常还包括多个车轮,在图1中以两个车轮14、16例证。为了控制车辆10的转向,车辆10包括根据本发明的转向组件(在图1中由虚线指示),如下文将分别参考图2a和图3呈现的。
[0048]
因此,参考图2a,本发明的第一方面涉及用于车辆10的转向组件22(参见图1)。车辆包括第一车轮14、第二车轮16、第三车轮18和第四车轮20。为了简化图2a,第一车轮14和第二车轮16在图2a中由虚线指示。应注意,车辆的实施例可以包括多于四个车轮。此外,可以设想转向组件22的实施例可以适于使超过四个车轮转向。
[0049]
转向组件包括第一转向致动器24和第二转向致动器28,第一转向致动器24包括第一致动构件26,第二转向致动器28包括第二致动构件30。在图2a中所示的实施例中,第一致动构件26是第一连杆臂,第二致动构件30是第二连杆臂。
[0050]
第一致动构件26连接到第一车轮14和第二车轮16中的每一个,并且由此适于控制该第一车轮14和第二车轮16中的每一个的转向角(参见图1)。第二致动构件30连接到第三车轮18和第四车轮20中的每一个,并且由此适于控制该第三车轮18和第四车轮20中的每一个的转向角。
[0051]
转向组件包括连接布置32,参见图2b。第一和第二转向致动器24、28经由连接布置32彼此连接,使得:
[0052]-当指示第一致动构件26与第二致动构件30之间的相对运动量的相对运动参数在预定的相对运动范围内时,连接布置32允许第一致动构件26和第二致动构件30彼此独立地运动,并且
[0053]-当相对运动参数在预定的相对运动范围之外时,连接布置32在第一致动构件26和第二致动构件30之间传递运动。
[0054]
仅作为示例,预定的相对运动范围可以包括第一致动构件26与第二致动构件30之间的零相对运动。因此,范围可以根据以下[-b,a]或(-b,a)制定,其中,参数a和b中的每一个分别表示正值,该正值指示第一致动构件26与第二致动构件30之间的相对运动。此外,如上所述,预定的相对运动范围例如可以是封闭范围,因而包括该范围的端点,或者是开放范围,因此不包括端点。因此,如果相对运动参数表示为r,则封闭范围[-b,a]包括以下r值:-b≤r≤a。类似地,开放范围(-b,a)包括以下r值:-b《r《a。当然也可以设想,在本发明的实施
例中,预定的相对运动范围可以在一个范围端点是开放的,而在另一范围端点是封闭的。
[0055]
作为非限制性示例,预定的相对运动范围可以对应于第一车轮14的第一转向角与第三车轮18的第三转向角之间的转向角差的预定的转向角差范围预定的转向角差范围由预定的上端点值和预定的下端点值限定。与预定的相对运动范围类似,预定的转向角差范围可以在一个范围端点开放而在另一端点封闭,在两个范围端点都封闭或者在两个范围端点都开放。
[0056]
因此,无论连接布置32的实施方式如何,连接布置可以使得当第一转向角与第三转向角之间的转向角差在预定的转向角差范围时,连接布置允许第一致动构件26与第二致动构件30彼此独立地运动。
[0057]
因而,尽管仅作为示例,但是连接布置32可以使得关于预定的转向角差范围来选择预定的相对运动范围。
[0058]
作为非限制性示例,预定的上端点值可以在0.5
°
至5
°
的范围内,优选地在1
°
至3
°
的范围内。
[0059]
仅作为示例,预定的下端点值可以在-5
°
至-0.5
°
的范围内,优选地在-3
°
至-1
°
的范围内。
[0060]
图2b示出了图2a转向组件的一部分。从图2a可以看出,第一转向致动器24包括连接到第一致动构件26的第一可枢转轴34,而第二转向致动器包括连接到第二致动构件30的第二可枢转轴36。连接布置32包括可枢转地连接到第一可枢转轴34的第一连接部38和可枢转地连接到第二可枢转轴36的第二连接部40。
[0061]
此外,虽然仅作为示例,但是连接布置32可以包括齿轮布置42,该齿轮布置42适于改变第一连接部38相对于第一可枢转轴34的枢转方向或第二连接部40相对于第二可枢转轴36的枢转方向。在图2b的实施例中,齿轮布置42适于改变第二连接部40相对于第二可枢转轴36的枢转方向。
[0062]
另外,再次参考图2b,连接布置32可以包括将第一连接部38和第二连接部40连接的枢转接头44。仅作为示例,枢转接头44可以使得当第一连接部与第二连接部之间的相对枢转在预定的相对枢转范围内时,枢转接头允许第一连接部与第二连接部之间的相对枢转运动,并且使得当第一连接部与第二连接部之间的相对枢转在预定的相对枢转范围之外时,枢转接头在第一连接部与第二连接部之间传递枢转运动。作为非限制性示例,预定的相对枢转范围可以包括第一连接部与第二连接部之间的零相对枢转。
[0063]
此外,虽然仅作为示例,但是枢转接头44可以具有一个或多个枢转接头邻接表面(未示出),该一个或多个枢转接头邻接表面可以位于彼此相距圆周距离处。此外,虽然还仅作为示例,但是第一连接部38可以具有第一连接部邻接表面(未示出),第二连接部40可以具有第二连接部邻接表面(未示出)。邻接表面可以使得当第一连接部与第二连接部之间的相对枢转在预定的相对枢转范围之外时,第一连接部邻接表面邻接枢转接头邻接表面,并且第二连接部邻接表面邻接(可能是第二)枢转接头邻接表面。
[0064]
作为非限制性示例,邻接表面可以使得预定的相对运动范围对应于上述预定的转向角差范围因而,使用指示从第一车轮14到第一连接部38的机械连接以及从第三车轮18到第二连接部40的机械连接的信息,可以实现邻接表面,使得预定的相对运
动范围对应于上述预定的转向角差范围
[0065]
虽然上述连接布置32的实施方式包括枢转接头,但也可以设想,在本发明的其它实施例中,连接布置32可以不同地实施。仅作为示例,预期连接布置32的实施方式可以包括将第一和第二转向致动器26、30彼此连接的转向联杆(图2a中未示出)。仅作为示例,连接布置32的这种实施方式可以具有自由游隙,当指示第一致动构件和第二致动构件之间的相对运动量的相对运动参数在预定的相对运动范围内时,该自由游隙允许第一和第二转向致动器26、30独立地运动。此外,一旦已经通过了自由游隙,转向联杆(图2a中未示出)可以充当刚性联杆机构,因而在第一致动构件26与第二致动构件30之间传递运动,即当相对运动参数在预定的相对运动范围之外时传递运动。
[0066]
此外,虽然仅作为示例,但是自由游隙可以使得预定的相对运动范围对应于上述预定的转向角差范围因而,使用指示从第一车轮14到第一转向致动器26的机械连接以及从第三车轮18到第二转向致动器30的机械连接的信息,可以实现自由游隙,使得预定的相对运动范围对应于上述预定的转向角差范围
[0067]
参考图2a,并且如上文参考图1所暗示的,车辆10(参见图1)具有在平行于车辆的预期行驶方向的纵向方向x上的纵向延伸部。车辆进一步具有在垂直于纵向方向x的横向方向y上的横向延伸部。此外,如图2a中指示的,车辆可以具有纵向中心线46,并且该纵向中心线46在纵向方向x上延伸并且位于车辆的横向中心。此外,第一和第二车轮14、16中的每一个位于纵向中心线46的一侧,第三和第四车轮18、20中的每一个位于纵向中心线46的相对侧。
[0068]
重新参考图2a,虽然仅作为示例,但是第一致动构件26可以经由第一联杆50连接到第一车轮14并且经由第二联杆52连接到第二车轮16。此外,再次参考图2a并且仅作为示例,第二致动构件30可以经由第三联杆54连接到第三车轮18并且经由第四联杆56连接到第四车轮20。
[0069]
作为非限制性示例,第一联杆52可以连接到第一车轮14的第一转向臂58,第二联杆52可以连接到第二车轮16的第二转向臂60,第三联杆54可以连接到第三车轮18的第三转向臂62,并且第四联杆56可以连接到第四车轮20的第四转向臂64。
[0070]
在图2a的实施例中,每个联杆52、54、56、58直接地连接到第一和第二致动构件26、30中的一个。然而,如下文将说明的,联杆52、54、56、58也可以间接地连接到第一和第二致动构件26、30中的一个。
[0071]
图3示出了本发明的另一实施例,其中,车辆具有在横向方向上延伸并位于车辆的纵向中心的横向中心线48(参见图1)。第一车轮14和第二车轮16中的每一个位于横向中心线48的一侧,第三车轮18和第四车轮20中的每一个位于横向中心线48的相对侧。
[0072]
此外,在图3的实施例中,第一联杆50连接到第一车轮14的第一转向臂58并且连接到第二车轮16的第二转向臂60。此外,在图3中,第二联杆52可以将第二车轮16的第二转向臂60连接到第一致动构件26。因此,在图3的实施例中,第一联杆50间接地连接到第一致动构件26。以类似方式,在图3的实施例中,第四联杆56连接到第四车轮20的第四转向臂64并且连接到第三车轮18的第三转向臂62。此外,在图3中,第三联杆54可以将第三车轮18的第三转向臂62连接到第二致动构件30。因此,在图3的实施例中,第四联杆56间接地连接到第二致动构件30。
[0073]
仅作为示例,转向组件22可以适于控制第一车轮14的第一转向角(参见图1)和第三车轮18的第三转向角,从而在第一转向角和第三转向角之间获得预定的转向角差。为此,尽管仅作为示例,但是转向组件22可以适于确定指示车辆当前驾驶条件的信息并基于指示当前驾驶条件的该信息来确定预定的转向角差。例如,转向组件22可以包括控制单元66,诸如电子控制单元,该控制单元基于指示当前驾驶条件的信息来适应上述预定的转向角差。
[0074]
作为非限制性示例,转向组件可以适于确定第一联杆50、第二联杆52、第三联杆54和第四联杆56中的每一个中的负载,并确定预定的转向角差,使得这些负载的组合,优选地是这些负载之和,等于或低于预定的负载阈值。因而,在转向组件22的示例实施例中,控制单元66可以适于接收指示每个联杆中的负载的信号,并调整每个车轮的转向角,直到联杆负载的组合等于或低于预定的负载阈值。因此,承载转向组件的车辆或转向组件本身可以包括一个或多个负载传感器(未示出),该一个或多个负载传感器适于测量联杆52、54、56、58中的每一个中的负载。
[0075]
仅作为示例,可以至少基于车辆的预期行驶方向,优选地还基于车辆的预期速度来确定预定的负载阈值。作为另一非限制性示例,预定的负载阈值可以至少基于车辆的实际行驶方向,优选地还基于车辆的实际速度来确定。
[0076]
此外,如图2a中指示的,转向组件22可以进一步包括转向控制组件68。在图2a的实施例中,转向控制组件68包括方向盘70。作为非限制性示例,转向控制组件68可以进一步包括控制单元66。
[0077]
可选地,转向控制组件68适于向第一转向致动器24发出第一转向请求信号。仅作为示例,当转向控制组件68包括控制单元66时,控制单元66可以适于向第一转向致动器24发出第一转向请求信号。此外,尽管仅作为示例,第一转向致动器24可以适于向第二转向致动器28发出第二转向请求信号。因此,在转向组件22中,第一转向致动器24可以用作主致动器,而第二转向致动器可以用作从致动器。
[0078]
作为上述配置的替选方式,例如使用控制单元66的转向控制组件68可以适于向第一转向致动器24发出第一转向请求信号并且向第二转向致动器28发出第二转向请求信号。
[0079]
应理解,本发明不限于上文所述和附图所示的实施例;相反,本领域技术人员应认识到可以在所附权利要求的范围内做出许多改变和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1