人力驱动车用的控制装置的制作方法
人力驱动车用的控制装置
1.本技术是申请日为2020年9月11日、申请号为202010954705.2、发明名称为“人力驱动车用的控制装置”的专利申请的分案申请,其全部内容结合于此作为参考。
技术领域
2.本公开涉及一种人力驱动车用的控制装置。
背景技术:
3.例如,专利文献1公开的人力驱动车具备检测与人力驱动车相关的信息的检测部。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2016-7905号公报。
技术实现要素:
7.发明要解决的课题
8.本公开的目的之一在于提供一种能够适当地控制人力驱动车用的组件的人力驱动车辆用的控制装置。
9.用于解决课题的方案
10.根据本公开的第一方面的控制装置是人力驱动车用的控制装置,具备:人力驱动车用的组件;以及多个检测部,所述多个检测部被构成为检测与所述人力驱动车的车速相关的信息,并且与车速相关的所述信息相互不同,其中所述多个检测部至少包括第一检测部,所述控制装置包括控制部,所述控制部被构成为当所述第一检测部的输出是第一状态时根据所述第一检测部的输出来控制所述组件,并且被构成为当所述第一检测部的输出不是所述第一状态时,根据所述多个检测部中的与所述第一检测部不同的预先确定的检测部的输出来控制所述组件。
11.根据第一方面的控制装置,当第一检测部的输出不是第一状态时,能够根据多个检测部中的与第一检测部不同的预先确定的检测部的输出来控制组件。因此,能够适当地控制人力驱动车用的组件。
12.根据本公开的第一方面的第二方面的控制装置,所述人力驱动车包括输入人力驱动力的曲柄,所述控制部被构成为当输入到所述曲柄的所述人力驱动力比预先确定的驱动力大、且所述第一检测部的输出是第一状态时,根据所述第一检测部的输出来控制所述组件,并且被构成为当输入到所述曲柄的所述人力驱动力比所述预先确定的驱动力大、且所述第一检测部的输出不是所述第一状态时,根据所述多个检测部中的与所述第一检测部不同的预先确定的检测部的输出来控制所述组件。
13.根据第二方面的控制装置,当输入到曲柄的人力驱动力比预先确定的驱动力大时、且第一检测部的输出不是第一状态时,能够适当地控制组件。
14.在为根据本公开的第一或第二方面的第三方面的控制装置中,所述多个检测部还
包括第二检测部,所述预先确定的检测部包括所述第二检测部,所述控制部被构成为当所述第一检测部的输出不是所述第一状态、且所述第二检测部的输出是第二状态时,根据所述第二检测部的输出来控制所述组件。
15.根据第三方面的控制装置,当第一检测部的输出不是第一状态、且第二检测部的输出是第二状态时,能够根据第二检测部的输出来控制组件。
16.在为根据本公开的第三方面的第四方面的控制装置中,所述多个检测部还包括第三检测部,所述预先确定的检测部包括所述第三检测部,所述控制部被构成为当所述第一检测部的输出不是所述第一状态、且所述第二检测部的输出不是所述第二状态时,根据所述第三检测部的输出来控制所述组件。
17.根据第四方面的控制装置,当第一检测部的输出不是第一状态、且第二检测部的输出不是第二状态时,能够根据第三检测部的输出来控制所述组件。
18.在为根据本公开的第三方面的第五方面的控制装置中,所述多个检测部还包括第三检测部和第四检测部,所述预先确定的检测部包括所述第三检测部和所述第四检测部,所述控制部被构成为当所述第一检测部的输出不是所述第一状态、且所述第二检测部的输出不是所述第二状态、且所述第三检测部是第三状态时,根据所述第三检测部的输出来控制所述组件,并且被构成为当所述第一检测部的输出不是所述第一状态、且所述第二检测部的输出不是所述第二状态、且所述第三检测部不是所述第三状态时,根据所述第四检测部的输出来控制所述组件。
19.根据第五方面的控制装置,当第一检测部的输出不是第一状态、且第二检测部的输出不是第二状态、且第三检测部是第三状态时,能够根据第三检测部的输出来控制组件。根据第五方面的控制装置,当第一检测部的输出不是第一状态、且第二检测部的输出不是第二状态、且第三检测部不是第三状态时,能够根据第四检测部的输出来控制组件。
20.在为根据本公开的第三到第五方面中任一项的第六方面的控制装置中,所述控制部被构成为当所述第一检测部的输出是所述第一状态、且所述第二检测部的输出是所述第二状态时,根据所述第一检测部和所述第二检测部中的至少一个的输出来控制所述组件,并且被构成为当所述第一检测部的输出不是所述第一状态、且所述第二检测部的输出是所述第二状态时,根据所述第二检测部的输出且不依赖于所述第一检测部的输出来控制所述组件,并且被构成为在所述第一检测部的输出是所述第一状态、且所述第二检测部的输出不是所述第二状态时,根据所述第一检测部的输出且不依赖于所述第二检测部的输出来控制所述组件。
21.根据第六方面的控制装置,当第一检测部的输出不是第一状态、且第二检测部的输出是第二状态时,能够根据第二检测部的输出且不依赖于第一检测部的输出来控制控制。根据第六方面的控制装置,当第一检测部的输出是第一状态、且第二检测部的输出不是第二状态时,能够根据第一检测部的输出且不依赖于第二检测部的输出来控制组件。
22.根据本公开的第七方面的控制装置是一种人力驱动车用的控制装置,所述人力驱动车具备人力驱动车用的组件和多个检测部,
23.所述多个检测部具备:第一检测部,被构成为检测与所述人力驱动车相关的第一信息;以及第二检测部,被构成为检测与所述人力驱动车相关的第二信息,其中所述第一信息和所述第二信息相互关联,所述控制装置包括控制部,所述控制部被构成为当所述第一
检测部的输出是第一状态、且所述第二检测部的输出是第二状态时,根据所述第一检测部和所述第二检测部中的至少一个的输出来控制所述组件,并且被构成为在所述第一检测部的输出不是所述第一状态、且所述第二检测部的输出是所述第二状态时,根据所述第二检测部的输出且不依赖于所述第一检测部的输出来控制所述组件,并且被构成为当所述第一检测部的输出是所述第一状态、且所述第二检测部的输出不是所述第二状态时,根据所述第一检测部的输出且不依赖于所述第二检测部的输出来控制所述组件。
24.根据第七方面的控制装置,当第一检测部的输出是第一状态、且第二检测部的输出是第二状态时,能够根据第一检测部和第二检测部中的至少一个的输出来控制组件。根据第七方面的控制装置,当第一检测部的输出不是第一状态、且第二检测部的输出是第二状态时,能够根据第二检测部的输出且不依赖于第一检测部的输出来控制组件。根据第七方面的控制装置,当第一检测部的输出是第一状态、且第二检测部的输出不是第二状态时,能够根据第一检测部的输出且不依赖于第二检测部的输出来控制组件。因此,能够适当地控制人力驱动车用的组件。
25.在为根据本公开的第七方面的第八方面的控制装置中,所述控制部被构成为根据与所述第一信息相关的第一参数和与所述第二信息相关的第二参数中的至少一个来控制所述组件。
26.根据第八方面的控制装置,能够根据与第一信息相关的第一参数和与第二信息相关的第二参数中的至少一个来控制组件。
27.在为根据本公开的第八方面的第九方面的控制装置中,所述控制部被构成为当所述第一检测部的输出不是所述第一状态、且所述第二检测部的输出是所述第二状态时,根据基于所述第二信息计算出的所述第二参数来推定所述第一参数,并且根据推定的所述第一参数来控制所述组件。
28.根据第九方面的控制装置,当第一检测部的输出不是第一状态、且第二检测部的输出是第二状态时,能够根据基于第二信息计算出的第二参数来推定第一参数,并且根据推定的第一参数来控制组件。
29.在为根据本公开的第八或第九方面的第十方面的控制装置中,所述控制部被构成为当所述第一检测部的输出是所述第一状态、且所述第二检测部的输出不是所述第二状态时,根据基于所述第一信息计算出的所述第一参数来推定所述第二参数,并且根据推定的所述第二参数来控制所述组件。
30.根据第十方面的控制装置,当第一检测部的输出是第一状态、且第二检测部的输出不是第二状态时,能够根据基于第一信息计算出的所述第一参数来推定第二参数,并且根据推定的所述第二参数来控制组件。
31.根据本公开的第十一方面的控制装置是人力驱动车用的控制装置,所述人力驱动车具备:人力驱动车用的组件;以及多个检测部,所述多个检测部被构成为检测与所述人力驱动车的车速相关的信息,且与车速相关的所述信息互不相同,其中所述多个检测部包括第一检测部和第二检测部,所述控制装置包括如下控制部,当所述第一检测部的输出是第一状态时且当所述第二检测部的输出是第二状态时,根据所述第一检测部及所述第二检测部中的至少一个的输出来控制所述组件,当所述第一检测部的输出不是所述第一状态时,不依赖于所述第二检测部的输出,而是控制所述组件以使得所述组件成为预先确定的状
态,并且当所述第二检测部的输出不是所述第二状态时,不依赖于所述第一检测部的输出,而是控制所述组件以使得所述组件成为所述预先确定的状态。
32.根据第十一方面的控制装置,当第一检测部的输出不是第一状态时,不依赖于第二检测部的输出,而是控制组件以使得组件成为预先确定的状态,并且当第二检测部的输出不是第二状态时,不依赖于第一检测部的输出,而是控制组件以使得组件成为预先确定的状态。因此,能够适当地控制人力驱动车用的组件。
33.在为根据本公开的第十一方面的第十二方面的控制装置中,所述第一检测部被构成为检测与所述车速相关的第三信息,所述第二检测部被构成为检测与所述车速相关的第四信息,所述第三信息和所述第四信息相互关联。
34.根据第十二方面的控制装置,能够根据第三信息和第四信息来控制组件。
35.在为根据本公开的第十二方面的第十三方面的控制装置中,所述控制部构被成为当所述第一检测部的输出是所述第一状态、且所述第二检测部的输出是所述第二状态时,根据所述第三信息和所述第四信息中的至少一个来控制所述组件。
36.根据第十三方面的控制装置,当第一检测部的输出是第一状态、且第二检测部的输出是第二状态时,能够根据第三信息和及第四信息中的至少一个来控制组件。
37.在为根据本公开的第十二或第十三方面的第十四方面的控制装置中,所述控制部被构成为当所述第一检测部的输出是所述第一状态、且所述第二检测部的输出是所述第二状态时,根据所述第三信息和所述第四信息两方来控制所述组件。
38.根据第十四方面的控制装置,当第一检测部的输出是第一状态、且第二检测部的输出是第二状态时,能够根据第三信息和第四信息两方来控制组件。
39.根据本公开的第十五方面的控制装置是人力驱动车用的控制装置,所述人力驱动车具备:人力驱动车用的组件;以及多个检测部,所述多个检测部被构成为检测与所述人力驱动车的车速相关的信息,并且与车速相关的所述信息相互不同,所述多个检测部包括第一检测部和第二检测部,所述控制装置包括如下控制部,当所述第一检测部输出的与所述人力驱动车的车速相关的第三信息和所述第二检测部输出的与所述人力驱动车的车速相关的第四信息中的至少一个是与所述人力驱动车的车速为预先确定的速度以上的情况对应时,控制所述组件以使得所述组件成为预先确定的状态。
40.根据第十五方面的控制装置,当第一检测部输出的与人力驱动车的车速相关的第三信息和第二检测部输出的与人力驱动车的车速相关的第四信息中的至少一个是与人力驱动车的车速为预先确定的速度以上的情况对应时,能够控制组件以使得组件成为预先确定的状态。因此,能够适当地控制人力驱动用车辆的组件。
41.在为根据本公开的第十五方面的第十六方面的控制装置中,当所述第三信息和所述第四信息中的一个是与所述人力驱动车的车速为预先确定的速度以上的情况对应时,所述控制部控制所述组件以使所述组件成为所述预先确定的状态。
42.根据第十六方面的控制装置,当第三信息和第四信息中的一个是与人力驱动车的车速为预先确定的速度以上的情况对应时,能够控制组件以使组件成为预先确定的状态。
43.在为根据本公开的第十六方面的第十七方面的控制装置中,当所述第三信息和所述第四信息两方是与所述人力驱动车的车速为预先确的定速度以上的情况对应时,所述控制部控制所述组件以使得所述组件成为所述预先确定的状态。
44.根据第十七方面的控制装置,当第三信息和第四信息两方是与人力驱动车的车速为预先确定的速度以上的情况对应时,能够控制组件以使得组件成为预先确定的状态。
45.在为根据本公开的第十一方面到第十六方面中任一项的第十八方面的控制装置中,所述组件包括电动促动器,所述预先确定的状态包括所述电动促动器不动作的状态。
46.根据第十八方面的控制装置,能够适当地控制电动促动器。
47.在为根据本公开的第三到第十四方面中任一项的第十九方面的控制装置中,当所述第二检测部的输出不是所述第二状态时,从所述第二检测部输出的信号包含预先确定的第二信号。
48.根据第十九方面的控制装置,能够根据从第二检测部输出的信号是否包含预先确定的信号,判定第二检测部的输出是否为第二状态。
49.在为根据本公开的第一到第十九方面中任一项的第二十方面的控制装置中,所述多个检测部包括被构成为检测与所述人力驱动车的车轮的旋转速度对应的信息的车速传感器、被构成为检测与所述人力驱动车的曲柄的旋转速度对应的信息的曲柄旋转传感器、被构成为检测与所述人力驱动车的加速度对应的信息的加速度传感器、被构成为检测与所述人力驱动车的位置对应的信息的位置信息检测传感器及被构成为检测与向所述人力驱动车赋予推进力的电动机的旋转速度对应的信息的电动机旋转传感器中的至少一个。
50.根据第二十方面的控制装置,能够根据车速传感器、曲柄旋转传感器、加速度传感器、位置信息检测传感器和电动机旋转传感器中的至少一个的输出来适当地控制组件。
51.在为根据本公开的第四方面的第二十一方面的控制装置中,所述多个检测部包括被构成为检测与所述人力驱动车的车轮的旋转速度对应的信息的车速传感器、被构成为检测与所述人力驱动车的曲柄的旋转速度对应的信息的曲柄旋转传感器、被构成为检测与所述人力驱动车的加速度对应的信息的加速度传感器、被构成为检测与所述人力驱动车的位置对应的信息的位置信息检测传感器以及被构成为检测与向所述人力驱动车赋予推进力的电动机的旋转速度对应的信息的电动机旋转传感器中的至少一个,所述第一检测部包括所述车速传感器。
52.根据第二十一方面的控制装置,能够根据车速传感器、曲柄旋转传感器、加速度传感器、位置信息检测传感器和电动机旋转传感器中的至少一个的输出来适当地控制组件,当车速传感器是第一状态时,能够根据车速传感器的输出来控制组件。
53.在为根据本公开的第二十一方面的第二十二方面的控制装置中,所述第二检测部包括所述曲柄旋转传感器和所述加速度传感器中的一个。
54.根据第二十二方面的控制装置,当车速传感器不是第一状态时,能够根据曲柄旋转传感器和加速度传感器中的一方的输出来控制组件。
55.在为根据本公开的第二十二方面的第二十三方面的控制装置中,所述第三检测部包括所述曲柄旋转传感器和所述加速度传感器中的另一个。
56.根据第二十三方面的控制装置,当车速传感器不是第一状态、且曲柄旋转传感器和加速度传感器的一方的输出不是第二状态时,能够根据曲柄旋转传感器和加速度传感器中的另一方的输出来控制组件。
57.在为根据本公开的第一到第十四和第二十到第二十三方面中任一项的第二十四方面的控制装置中,当所述第一检测部的输出不是所述第一状态时,从所述第一检测部输
出的信号包含预先确定的第一信号。
58.根据第二十四方面的控制装置,能够根据从第一检测部输出的信号是否包含预先确定的第一信号,判定第一检测部的输出是否为第一状态。
59.在为根据本公开的第二十四方面的第二十五方面的控制装置中,所述第一信号包含在所述第一检测部发生故障的情况、所述第一检测部与所述控制部的连接存在异常的情况、所述第一检测部不是预先确定的构成的情况及所述第一检测部与所述控制部之间的连接部不是预先确定的构成的情况中的至少一种情况下产生的信号。
60.根据第二十五方面的控制装置,在第一检测部发生故障的情况、第一检测部与控制部的连接存在异常的情况、第一检测部不是预先确定的构成的情况及第一检测部与控制部之间的连接部不是预先确定的构成的情况下,能够适当地控制组件。
61.在为根据本公开的第一到第十四和第二十到第二十五方面中任一项的第二十六方面的控制装置中,当所述第一检测部的输出不是所述第一状态时,不从所述第一检测部输出信号。
62.根据第二十六方面的控制装置,能够根据是否从第一检测部输出信号,判定第一检测部的输出是否为第一状态。
63.在为根据本公开的第一到第十四和第二十到第二十六方面中任一项的第二十七方面的控制装置中,所述组件包括向所述人力驱动车赋予推进力的电动机。
64.根据第二十七方面的控制装置,能够根据多个检测部所包括的检测部的输出来适当地控制电动机。
65.在为根据本公开的第一到第二十七方面中任一项的第二十八方面的控制装置中,所述控制部当所述第一检测部的输出不是所述第一状态时使通知部通知预先确定的通知信息。
66.根据第二十八方面的控制装置,用户能够通过通知部把握第一检测部的输出不是第一状态的情况。
67.发明的效果
68.本公开的人力驱动车用的控制装置能够适当地控制人力驱动车用的组件。
附图说明
69.图1是第一实施方式的包括人力驱动车用的控制装置的人力驱动车的侧视图。
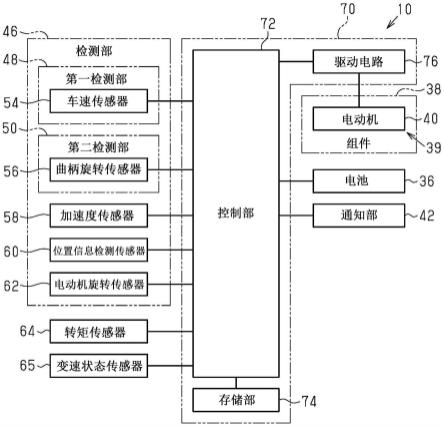
70.图2是示出包括第一实施方式的人力驱动车用的控制装置的人力驱动车的电气构成的框图。
71.图3是由图2的控制部执行的组件控制处理的流程图的第一部分。
72.图4是由图2的控制部执行的组件控制处理的流程图的第二部分。
73.图5是由第二实施方式的控制部执行的组件控制处理的流程图。
74.图6是示出包括第三实施方式的人力驱动车用的控制装置的人力驱动车的电气构成的框图。
75.图7是由图6的控制部执行的组件控制处理的流程图。
76.图8是由第四实施方式的控制部执行的组件控制处理的流程图。
77.图9是由第五实施方式的控制部执行的组件控制处理的流程图。
78.图10是由第三实施方式的第一变形例的控制部执行的组件控制处理的流程图。
79.图11是由第三实施方式的第二变形例的控制部执行的组件控制处理的流程图。
80.图12是由第三实施方式的第三变形例的控制部执行的组件控制处理的流程图的第一部分。
81.图13是由第三实施方式的第三变形例的控制部执行的组件控制处理的流程图的第二部分。
82.图14是由第二实施方式的变形例的控制部执行的组件控制处理的流程图。
83.图15是由第四实施方式的变形例的控制部执行的组件控制处理的流程图。
84.图16是由第五实施方式的变形例的控制部执行的组件控制处理的流程图。
85.符号说明
86.10、人力驱动车;12、曲柄;14、车轮;38、组件;39、电动促动器;40、电动机;42、通知部;46、检测部;48、第一检测部;50、第二检测部;54、车速传感器;56、曲柄旋转传感器;58、加速度传感器;60、位置信息检测传感器;62、电动机旋转传感器;66、第三检测部;68、第四检测部;70、控制装置;72、控制部。
具体实施方式
87.《第一实施方式》
88.参照图1至图4,对第一实施方式的人力驱动车用的控制装置70进行说明。人力驱动车10是至少能够由人力驱动力h驱动的车。人力驱动车10不限定车轮的数量,例如也包括单轮车和具有三轮以上的车轮的车。人力驱动车10例如包括:山地自行车、公路自行车、城市自行车、载货自行车和卧式自行车等各种自行车以及电动自行车(e-bike)。电动自行车包括通过电动机辅助车辆的推进的电动辅助自行车。以下,在实施方式中,将人力驱动车10作为自行车进行说明。
89.人力驱动车10具备输入人力驱动力h的曲柄12。人力驱动车10还具备车轮14和车身16。车轮14包括后轮14a和前轮14b。车身16包括框架18。曲柄12包括能够相对于框架18旋转的曲柄轴12a和分别设置于曲柄轴12a的轴向端部的曲柄臂12b。踏板20与各曲柄臂12b连结。后轮14a通过曲柄12旋转而被驱动。后轮14a支承于框架18。曲柄12和后轮14a由驱动机构22连结。驱动机构22包括与曲柄轴12a连结的第一旋转体24。曲柄轴12a和第一旋转体24可以连结成一体旋转,也可以经由第一单向离合器连结。第一单向离合器被构成为当曲柄12前转时使第一旋转体24前转,当曲柄12后转时容许曲柄12与第一旋转体24的相对旋转。第一旋转体24包括链轮、带轮或锥齿轮。驱动机构22还包括第二旋转体26和连结部件28。连结部件28将第一旋转体24的旋转力传递到第二旋转体26。连结部件28例如包括链条、皮带或轴。
90.第二旋转体26与后轮14a连结。第二旋转体26包括链轮、带轮或锥齿轮。较优选在第二旋转体26和后轮14a之间设置有第二单向离合器。第二单向离合器被构成为当第二旋转体26前转时使后轮14a前转,当第二旋转体26后转时容许第二旋转体26与后轮14a的相对旋转。
91.在框架18经由前叉30安装有前轮14b。在前叉30经由把立32连结有车把34。在本实施方式中,后轮14a通过驱动机构22与曲柄12连结,但是也可以是后轮14a和前轮14b中的至
少一方通过驱动机构22与曲柄12连结。
92.人力驱动车10包括人力驱动车用的电池36。电池36包括一个或多个电池元件。电池元件包括充电电池。电池36向控制装置70供给电力。电池36较优选通过有线或无线方式与控制装置70的控制部72连接成能够通信。电池36例如能够通过电力线通信(plc;power line communication)、can(controller area network,控制器局域网)或uart(universal asynchronous receiver/transmitter,通用异步收发器)与控制部72通信。
93.人力驱动车10包括人力驱动车用的组件38。组件38较优选包括电动促动器39。组件38较优选包括向人力驱动车10赋予推进力的电动机40。当组件38包括电动机40时,电动促动器39为电动机40。电动机40包括一个或多个电动机。电动机40被构成为将旋转传递到从踏板20到后轮14a的人力驱动力h的动力传递路径和前轮14b的至少一方。从踏板20到后轮14a的人力驱动力h的动力传递路径包括后轮14a。在本实施方式中,电动机40被构成为设置于人力驱动车10的框架18,将旋转传递到第一旋转体24。包括电动机40和用于设置电动机40的壳体而构成驱动单元。较优选的是,在电动机40和曲柄轴12a之间的动力传递路径设置有第三单向离合器,以便当使曲柄轴12a向人力驱动车10前进的方向旋转时电动机40不会因曲柄12的旋转力而旋转。在后轮14a和前轮14b中的至少一方设置电动机40的情况下,电动机40也可以包括轮毂电机。
94.人力驱动车10较优选还包括通知部42。通知部42包括显示部。显示部例如具备显示面板。显示部例如包括便携式电子设备、显示器、智能手机、平板型计算机和自行车码表中的至少一个。通知部42也可以包括扬声器。
95.较优选的是,人力驱动车10包括被构成为改变人力驱动车10的变速比r的变速器44。人力驱动车10的变速比r是驱动轮的旋转速度相对于曲柄12的旋转速度n的比率。在本实施方式中,驱动轮是后轮14a。变速器44例如包括前拨、后拨和内装变速器中的至少一个。在变速器44包括内装变速器的情况下,内装变速器例如设置于后轮14a的轮毂。变速器44包括被构成为通过电动促动器而动作的电动变速器和被构成为通过鲍登线而动作的线缆式变速器中的至一个。
96.控制装置70包括控制部72。控制部72包括执行预先确定的控制程序的运算处理装置。运算处理装置例如包括cpu(central processing unit,中央处理器)或mpu(micro processing unit,微处理单元)。运算处理装置可以设置在相互分开的多个场所。控制部72也可以包括一个或多个微型计算机。控制装置70较优选还包括存储部74。在存储部74存储各种控制程序和用于各种控制处理的信息。存储部74例如包括非易失性存储器和易失性存储器。非易失性存储器例如包括rom(read-only memory,只读存储器)、eprom(erasable programmable read only memory,可擦可编程只读存储器)、eeprom(electrically erasable programmable read-only memory,电可擦除可编程只读存储器)和闪存中的至少一个。易失性存储器例如包括ram(random access memory,随机存取存储器)。
97.控制装置70较优选还具备电动机40的驱动电路76。驱动电路76和控制部72较优选设置于设置电动机40的壳体。驱动电路76和控制部72例如也可以设置于同一电路基板。驱动电路76包括逆变器电路。驱动电路76控制从电池36供给到电动机40的电力。驱动电路76与控制部72有线连接或无线连接。驱动电路76根据来自控制部72的控制信号来驱动电动机40。
98.人力驱动车10具备多个检测部46,该多个检测部46被构成为检测与人力驱动车10的车速v相关的信息,并且与车速v相互的信息相互不同。多个检测部46经由无线通信装置或电缆与控制部72连接。多个检测部46至少包括第一检测部48。多个检测部46较优选还包括第二检测部50。第一检测部48被构成为检测与车速v相关的第一信息。第一信息包含第一参数p1。第二检测部50被构成为检测与车速v相关的第二信息。第二信息包含第二参数p2。较优选的是,第一信息和所述第二信息相互关联。第一参数p1与第二参数p2相关。第一信息能够根据第二信息推定。
99.较优选的是,多个检测部46包括车速传感器54、曲柄旋转传感器56、加速度传感器58、位置信息检测传感器60和电动机旋转传感器62中的至少一个。第一检测部48较优选包括车速传感器54。第二检测部50较优选包括曲柄旋转传感器56和加速度传感器58中的一方。第二检测部50较优选包括曲柄旋转传感器56。在本实施方式中,第一检测部48包括车速传感器54,第二检测部50包括曲柄旋转传感器56,但是第一检测部48所包括的传感器和第二检测部50所包括的传感器的组合并不限于此。也可以第一检测部48包括曲柄旋转传感器56,第二检测部50包括车速传感器54。在图2所示的人力驱动车10中,具备车速传感器54、曲柄旋转传感器56、加速度传感器58、位置信息检测传感器60和电动机旋转传感器62,但是在本实施方式中,也可以省略加速度传感器58、位置信息检测传感器60和电动机旋转传感器62中的至少一个。
100.车速传感器54被构成为检测与人力驱动车10的车轮14的旋转速度对应的信息。车速传感器54例如被构成检测设置于人力驱动车10的车轮14的磁铁。车速传感器54例如被构成为在车轮14旋转一周的期间输出预先确定的次数的检测信号。预先确定的次数例如是1。车速传感器54输出与车轮14的旋转速度对应的信号。控制部72能够基于车轮14的旋转速度和与车轮14的周长相关的信息,计算人力驱动车10的车速v。存储部74存储与车轮14的周长相关的信息。车速传感器54例如包括构成舌簧开关的磁性簧片或霍尔元件。车速传感器54可以采用安装于人力驱动车10的框架18的后下叉并检测安装于后轮14a的磁铁的构成,也可以采用设置于前叉30并检测安装于前轮14b的磁铁的构成。本在实施方式中,车速传感器54被构成为当车轮14旋转一周时舌簧开关检测一次磁铁。车速传感器54并不限于检测设置于车轮14的磁铁的构成,例如,也可以包括光学传感器等而构成。车速传感器54经由无线通信装置或电缆与控制部72连接。
101.曲柄旋转传感器56被构成为检测与人力驱动车10的曲柄12的旋转速度n对应的信息。曲柄旋转传感器56例如设置于人力驱动车10的框架18或驱动单元。曲柄旋转传感器56包括输出与磁场强度对应的信号的磁传感器而构成。在周向上磁场强度变化的环状的磁铁设置于曲柄轴12a、与曲柄轴12a联动而旋转的部件或从曲柄轴12a到第一旋转体24之间的动力传递路径。与曲柄轴12a联动而旋转的部件包括电动机40的输出轴。曲柄旋转传感器56输出与曲柄12的旋转速度n对应的信号。磁铁可以在从曲柄轴12a到第一旋转体24的人力驱动力h的动力传递路径中设置于与曲柄轴12a一体旋转的部件。例如,在曲柄轴12a与第一旋转体24之间未设置第一单向离合器的情况下,磁铁也可以设置于第一旋转体24。曲柄旋转传感器56也可以代替磁传感器而包括光学传感器、加速度传感器、陀螺仪传感器或转矩传感器等。曲柄旋转传感器56经由无线通信装置或电缆与控制部72连接。
102.加速度传感器58被构成为检测与人力驱动车10的加速度d对应的信息。较优选的
是,加速度传感器58被构成为检测使人力驱动车10在水平面上使前轮14b和后轮14a接触地面且直立的状态下的与人力驱动车10的前后方向的加速度d对应的信息。加速度传感器58经由无线通信装置或电缆与控制部72连接。
103.位置信息检测传感器60被构成为检测与人力驱动车10的位置对应的信息。位置信息检测传感器60例如包括gps(global positioning system,全球定位系统)接收部。位置信息检测传感器60经由无线通信装置或电缆与控制部72连接。位置信息检测传感器60例如也可以配置于智能手机等电子设备。通过骑行人持有电子设备或将电子设备安装于框架,位置信息检测传感器60能够检测与人力驱动车10的位置对应的信息。
104.电动机旋转传感器62被构成为检测与向人力驱动车10赋予推进力的电动机40的旋转速度对应的信息。电动机旋转传感器62设置于电动机40或电动机40的周围。电动机旋转传感器62例如包括分解器或编码器。在电动机40与人力驱动力h的传递路径之间包括减速机的情况下,电动机旋转传感器62也可以被构成为检测构成减速机的旋转体的旋转速度。电动机旋转传感器62经由无线通信装置或电缆与控制部72连接。
105.人力驱动车10较优选还包括转矩传感器64。转矩传感器64被构成为输出与由人力驱动力h提供到曲柄12的转矩对应的信号。例如在动力传递路径设置有第一单向离合器的情况下,转矩传感器64较优选设置在相比于第一单向离合器靠向动力传递路径的上游侧。转矩传感器64包括应变传感器、磁应变传感器或压力传感器等。应变传感器包括应变仪。转矩传感器64设置于动力传递路径或动力传递路径所包括的部件的附近所包括的部件。包括于动力传递路径的部件例如是曲柄轴12a、在曲柄轴12a与第一旋转体24之间传递人力驱动力h的部件、曲柄臂12b或踏板20。转矩传感器64经由无线通信装置或电缆与控制部72连接。
106.人力驱动车10较优选还包括变速状态传感器65。变速状态传感器65输出与变速器44的变速状态相关的信息。变速状态例如包括变速档。变速状态传感器65可以设置于变速器44,也可以设置于鲍登线或变速操作装置。在变速器44是电动变速器的情况下,变速状态传感器65例如被构成为检测电动变速器的电动促动器的动作。电动变速器的电动促动器例如包括电动机和减速机。变速状态传感器65被构成为检测电动促动器的电动机或减速机的动作。在变速器44是线缆式变速器的情况下,变速状态传感器65例如被构成为检测变速器44的可动部的动作、鲍登线的动作和变速操作装置的动作中的至少一个。变速状态传感器65例如包括磁传感器、电位计、旋转编码器、线性编码器或光学传感器等而构成。存储部74相对应地存储与从变速状态传感器65输出的变速状态相关的信息和与人力驱动车10的变速比r相关的信息。控制部能够根据与从变速状态传感器65输出的变速状态相关的信息和存储于存储部74的信息,获取与当前的人力驱动车10的变速比r相关的信息。
107.控制部72根据多个检测部46的输出来控制组件38。在组件38是电动机40的情况下,控制部72根据多个检测部46的输出来控制电动机40。
108.控制部72根据人力驱动车10的车速v和曲柄12的旋转速度n中的至少一个来控制电动机40。较优选的是,控制部72还根据人力驱动力h控制电动机40。控制部72被构成为可以在辅助模式和行走模式下控制电动机40。在行走模式下,控制部72被构成为当输入到曲柄12的人力驱动力h为预先确定的驱动力hx以下时驱动电动机40。预先确定的驱动力hx例如是0nm。行走模式例如用于用户推着人力驱动车10行走的情况。在行走模式下,控制部72被构成为当人力驱动力h为预先确定的驱动力hx以下时驱动电动机40。预先确定的驱动力
hx例如是0nm。在辅助模式下,控制部72被构成为还根据人力驱动力h控制电动机40,当人力驱动力h比预先确定的驱动力hx大时驱动电动机40。人力驱动力h可以由转矩ht表示,也可以由功率wh表示。在人力驱动力h由功率表示的情况下,人力驱动力h通过将由转矩传感器64检测出的转矩与由曲柄旋转传感器56检测出的曲柄12的旋转速度n相乘而得到。
109.控制部72例如被构成为控制电动机40,以使电动机40的辅助力m相对于人力驱动力h成为预先确定的辅助比率x。预先确定的辅助比率x不固定,例如可以根据人力驱动力h而变化,可以根据车速v而变化,也可以根据人力驱动力h和车速v的两方而变化。人力驱动力h和辅助力m可以由转矩表示,也可以由功率表示。在由转矩表示人力驱动力h和辅助力m的情况下,将人力驱动力h记载为人力转矩th,将辅助力m记载为辅助转矩tm。在由功率表示人力驱动力h和辅助力m的情况下,将人力驱动力h记载为人力功率wh,将辅助力m记载为辅助功率wm。有时将辅助转矩tm相对于人力驱动车10的人力转矩th的转矩比率记载为辅助比率at。有时将电动机40的辅助功率wm相对于人力功率wh的比率记载为辅助比率aw。控制部72被构成为例如通过选自人力驱动力h与辅助比率x的对应关系的、至少一部分相互不同的多个控制状态中的一个控制状态来控制电动机40。人力功率wh通过人力转矩th与曲柄12的旋转速度n的相乘来计算。当电动机40的输出经由减速机输入到人力驱动力h的动力路径时,将减速机的输出作为辅助力m。在没有减速机的情况下,辅助功率wm通过电动机40的输出转矩与电动机40的旋转速度的相乘来计算。在具有减速机的情况下,辅助功率wm通过减速机的输出转矩与减速机的输出旋转速度的相乘来计算。在具有减速机的情况下,存储部74被构成为存储与减速机的减速比相关的信息。控制部72能够根据电动机40的旋转速度和与减速机的减速比相关的信息来计算减速机的输出旋转速度。存储部74例如存储表示电动机40的控制指令与电动机40的输出转矩的关系的信息。控制部72例如能够根据存储于存储部74的表示电动机40的控制指令与电动机40的输出转矩的关系的信息来计算电动机40的输出转矩。控制部72例如能够根据电动机40的输出转矩和与减速机的减速比相关的信息来计算减速机的输出转矩。控制部72被构成为根据人力转矩th或人力功率wh将控制指令输出到电动机40的驱动电路76。控制指令例如包括转矩指令值。多个控制状态也可以包括不驱动电动机40的控制状态。
110.控制部72将电动机40控制成辅助力m为上限值mx以下。在辅助力m由转矩表示的情况下,控制部72将电动机40控制成辅助转矩tm为上限值mtx以下。较优选的是,上限值mtx是30nm以上且90nm以下的范围的值。上限值mtx例如是80nm。上限值mtx例如由电动机40的输出特性确定。在辅助力m由功率表示的情况下,控制部72将电动机40控制成辅助功率wm为上限值mwx以下。
111.例如,如果车速v成为预先确定的车速vx以上,则控制部72使电动机40停止。预先确定的车速vx例如是时速45km。预先确定的车速vx也可以小于时速45km,例如也可以是时速25km。
112.例如,当曲柄12的旋转速度n小于预先确定的第一旋转速度n1时,控制部72使电动机40停止。预先确定的第一旋转速度n1例如是0rpm。例如,如果曲柄12的旋转速度n成为预先确定的第二旋转速度n2以上,则控制部72可以使电动机40停止或将电动机40控制成辅助力m变小。
113.控制部72被构成为当第一检测部48的输出是第一状态时根据第一检测部48的输
出来控制组件38。控制部72被构成为当第一检测部48的输出不是第一状态时,根据多个检测部46中的与第一检测部48不同的预先确定的检测部的输出来控制组件38。本在实施方式中,预先确定的检测部包括第二检测部50。
114.当第一检测部48的输出是第一状态时,控制部72判定为输入到控制部72的第一检测部48的输出正常。当第一检测部48的输出不是第一状态时,控制部72判定为输入到控制部72的第一检测部48的输出不正常。
115.在第一例中,当第一检测部48的输出不是第一状态时,从第一检测部48输出的信号包含预先确定的第一信号。预先确定的第一信号包含第一检测部48的输出异常信号。异常信号例如在第一检测部48发生故障的情况、第一检测部48与控制部72的连接存在异常的情况、第一检测部48不是预先确定的构成的情况及第一检测部48与控制部72的连接部不是预先确定的构成的情况中的至少任一种情况下产生。
116.在第二例中,当第一检测部48的输出不是第一状态时,不从第一检测部48输出信号。不从第一检测部48输出信号的情况包括人力驱动车10没有搭载第一检测部48的情况、没有向第一检测部48供给电力的情况及没连接第一检测部48与控制部72的情况中的至少一种。控制部72可以在第一例和第二例中的至少一个的情况下判定为第一检测部48的输出不是第一状态。
117.较优选的是,控制部72被构成为根据与第一信息相关的第一参数p1和与第二信息相关的第二参数p2中的至少一个来控制组件38。控制部72被构成为当第一检测部48的输出不是第一状态时不依赖于第一检测部48的输出来控制组件38。控制部72也可以被构成为当第一检测部48的输出不是第一状态时根据第二检测部50的输出来控制组件38。例如,在根据与第二信息相关的第二参数p2来推定第一参数p1的情况下,控制部72在根据第一检测部48的输出对第一参数p1进行校正的第一处理、根据第一检测部48的输出对组件38的控制指令值进行校正的第二处理及独立于根据第二检测部50的输出来控制组件38的一系列处理的第三处理中的任一个处理中使用第一检测部48的输出。
118.在本实施方式中,第一参数p1包含车速v,第二参数p2包含曲柄12的旋转速度n。控制部72被构成为根据曲柄12的旋转速度n来推定车速v。控制部72通过将曲柄12的旋转速度n乘以人力驱动车10的变速比r和后轮14a的周长来推定车速v。人力驱动车10的变速比r对应于车轮14的旋转速度相对于人力驱动车10的曲柄12的旋转速度n的比。存储部74被构成为预先存储与后轮14a的周长相关的信息。
119.在第二检测部50包括加速度传感器58的情况下,第二参数p2包含加速度d。控制部72被构成为通过对人力驱动车10的行驶开始起的加速度d进行累计来推定车速v。
120.在第二检测部50包括位置信息检测传感器60的情况下,第二参数p2包含人力驱动车10的移动距离。控制部72被构成为根据由gps接收部获取的gps信息、预先记录于存储部74的地图信息、及时间来推定车速v。在第二检测部50包括位置信息检测传感器60的情况下,控制部72较优选包括对时间进行计测的计时器和计时电路中的至少一个。
121.在第二检测部50包括电动机旋转传感器62的情况下,第二参数p2包含电动机40的旋转速度。控制部72被构成为通过将电动机40的变速比和后轮14a的周长与电动机40的旋转速度相乘来推定车速v。电动机40的变速比对应于车轮14的旋转速度与电动机40的旋转速度的比。在第二检测部50包括电动机旋转传感器62的情况下,存储部74预先存储与后轮
14a的周长相关的信息。
122.较优选的是,当第一检测部48的输出不是第一状态时,控制部72使通知部42通知预先确定的通知信息。预先确定的通知信息被构成为能够向用户通知第一检测部48的错误。在通知部42包括显示部的情况下,例如,预先确定的通知信息包含文字和图像中的至少一个。在通知部42包括扬声器的情况下,例如,预先确定的通知信息包含声音和警告音中的至少一个。当第一检测部48的输出不是第一状态时,通知部42例如可以持续进行通知,也可以断续地进行通知,直到成为第一状态为止。
123.参照图3和图4,说明根据第一检测部48的输出状态控制组件38的处理。如果向控制部72供给电力,则控制部72开始处理而转移至图3所示的流程图的步骤s11。如果图3和图4的流程图结束,则控制部72在预先确定的周期后在电力的供给停止前反复进行从步骤s11开始的处理。图3和图4的处理示出组件38是电动机40的情况的一例。控制部72与图3和图4所示的流程图的处理并行而执行例如根据人力驱动力h来驱动电动机40的辅助处理。例如,如果人力驱动力h比预先确定的驱动力hx大,则控制部72驱动电动机40,如果人力驱动力h为预先确定的驱动力hx以下,则控制部72使电动机40停止。图3和图4的流程图中的控制部72的处理比辅助处理优先执行。在组件38为电动机40的情况下,控制部72被构成为当第一检测部48的输出是第一状态时,并且当根据第一检测部48的输出计算出的车速v不是预先确定的车速vx以上时、且人力驱动力h比预先确定的驱动力hx大时,根据人力驱动力h驱动电动机40。在组件38为电动机40的情况下,控制部72被构成为当第一检测部48的输出不是第一状态时,并且当根据多个检测部46中的与第一检测部48不同的预先确定的检测部的输出推定的车速v不是预先确定的车速vx以上时、且人力驱动力h比预先确定的驱动力hx大时,根据人力驱动力h驱动电动机40。
124.控制部72在步骤s11中判定车速传感器54的输出是否为第一状态。控制部72当车速传感器54的输出是第一状态时转移至步骤s12。控制部72在步骤s12中根据车速传感器54的输出来计算车速v并转移至步骤s13。
125.控制部72在步骤s13中判定车速v是否为预先确定的车速vx以上。控制部72当车速v为预先确定的车速vx以上时转移至步骤s14。控制部72在步骤s14中使电动机40停止并结束处理。在电动机40为驱动着的情况下,控制部72在步骤s14中使电动机40停止。在电动机40为停止着的情况下,控制部72在步骤s14中保持电动机40的停止。控制部72在步骤s13中当车速v不是预先确定的车速vx以上时结束处理。
126.控制部72在步骤s11中当车速传感器54的输出不是第一状态时转移至步骤s15。控制部72在步骤s15中判定曲柄12是否向正转方向旋转。控制部72当曲柄12不是向正转方向旋转时结束处理。正转方向等同于前转方向。控制部72当曲柄12向正转方向旋转时转移至步骤s16。
127.控制部72在步骤s16中判定是否获取与变速状态相关的信息。控制部72在不获取与变速档相关的信息的情况下转移至步骤s17。控制部72例如当变速状态传感器65未与控制部72连接时不获取与变速档相关的信息。是否连接了变速状态传感器65可以根据预先存储于存储部74的信息来判定,也可以根据来自变速状态传感器65的信号是否输入到控制部72来判定。
128.控制部72在步骤s17中判定曲柄12的旋转量c是否为预先确定的旋转量cx以上。控
制部72例如当从曲柄12的旋转开始起的旋转量c为预先确定的第一旋转量cx1以上时,判定为曲柄12的旋转量c为预先确定的第一旋转量cx1以上。控制部72当曲柄12的旋转量c不是预先确定的第一旋转量cx1以上时结束处理。控制部72当曲柄12的旋转量c为预先确定的第一旋转量cx1以上时转移至步骤s18。控制部72在步骤s18中使通知部42通知车速传感器54的错误并转移至步骤s19。预先确定的第一旋转量cx1如果由曲柄12的旋转角度表示,则例如包含在20度到720度的范围内。
129.控制部72在步骤s19中根据人力驱动车10的变速比r的最大值和曲柄12的旋转速度n来推定车速v并转移至步骤s20。人力驱动车10的变速比r的最大值预先存储于存储部74。控制部72通过将存储于存储部74的变速比r的最大值和由曲柄旋转传感器56检测出的曲柄12的旋转速度n和后轮14a的周长相乘来推定车速v。
130.控制部72在步骤s20中判定在步骤s19中推定的车速v是否为预先确定的车速vx以上。控制部72当车速v为预先确定的车速vx以上时转移至步骤s21。控制部72在步骤s21中使电动机40停止并结束处理。控制部72在电动机40为驱动着的情况下在步骤s21中使电动机40停止。控制部72在电动机40为停止着的情况下在步骤s21中保持电动机40的停止。控制部72在步骤s20中当车速v不是预先确定的车速vx以上时结束处理。
131.控制部72在步骤s16中在获取与变速状态相关的信息的情况下转移至步骤s22。控制部72在步骤s22中判定曲柄12的旋转量c是否为预先确定的第二旋转量cx2以上。控制部72能够根据与变速档相关的信息和存储于存储部74的信息,获取当前的变速比r。控制部72当曲柄12的旋转量c不是预先确定的第二旋转量cx2以上时结束处理。控制部72当曲柄12的旋转量c为预先确定的第二旋转量cx2以上时转移至步骤s23。预先确定的第二旋转量cx2可以与预先确定的第一旋转量cx1相同,也可以不同。预先确定的第二旋转量cx2例如可以对应于各变速档而为不同的值。在与各变速档对应的预先确定的第二旋转量cx2不同的情况下,在存储部74对应地存储与各变速档相关的信息和预先确定的第二旋转量cx2。在这种情况下,与变速比r为最大的变速档对应的预先确定的第二旋转量cx2较优选与预先确定的第一旋转量cx1相等。例如,在各变速比r中,在人力驱动车10前进了相同距离的情况下,当从步骤s22转移至步骤s23时,只要预先以变速比r越小而预先确定的第二旋转量cx2越大的方式进行对应即可。控制部72在步骤s23中使通知部42通知车速传感器54的错误并转移至步骤s24。
132.控制部72在步骤s24中根据当前的变速比r和曲柄12的旋转速度n来推定车速v并转移至步骤s25。控制部72通过将当前的变速比r和由曲柄旋转传感器56检测出的曲柄12的旋转速度n和后轮14a的周长相乘来推定车速v。
133.控制部72在步骤s25中判定在步骤s24中推定的车速v是否为预先确定的车速vx以上。控制部72当车速v为预先确定的车速vx以上时转移至步骤s26。控制部72在步骤s26中使电动机40停止并结束处理。控制部72在电动机40为驱动着的情况下,在步骤s26中使电动机40停止。控制部72在电动机40为停止着的情况下在步骤s26中保持电动机40的停止。控制部72在步骤s25中当车速v不是预先确定的车速vx以上时结束处理。
134.控制部72被构成为在步骤s14、步骤s21和步骤s26中设定禁止电动机40的驱动的标志,当步骤s13、步骤s20和步骤s25中为“否”时解除禁止电动机40的驱动的标志。控制部72被构成为在设定了禁止电动机40的驱动的标志的情况下不驱动电动机40。控制部72被构
成为在解除了禁止电动机40的驱动的标志的情况下能够根据人力驱动力h驱动电动机40。
135.在曲柄12停止的情况下和曲柄12空转的情况下,难以根据曲柄旋转传感器56的输出来推定车速v。控制部72在通过曲柄12的旋转来驱动人力驱动车10的情况下、且车速传感器54不是第一状态时,根据曲柄旋转传感器56的输出来控制电动机40,因此能够在根据曲柄旋转传感器56的输出推定的车速v与实际的车速v的背离小的状态下,根据曲柄旋转传感器56的输出来控制电动机40。
136.控制部72可以当步骤s15中为“是”时,判定人力转矩th是否为预先确定的值thx以上。控制部72当人力转矩th为预先确定的值thx以上时转移至步骤s16,当人力转矩th小于预先确定的值thx时结束处理。预先确定的值thx例如是5nm以上且10nm以下的范围的值。在这种情况下,能够在人力转矩th传递到后轮14a的状态下推定曲柄旋转传感器56的输出,因此能够在根据曲柄旋转传感器56的输出推定的车速v与实际的车速v的背离小的状态下,根据曲柄旋转传感器56的输出来控制电动机40。
137.《第二实施方式》
138.参照图2和图5,对第二实施方式的控制装置70进行说明。对与第一实施方式共同的构成赋予与第一实施方式相同的符号,省略重复的说明。
139.在本实施方式中,第一检测部48包括车速传感器54、曲柄旋转传感器56、加速度传感器58、位置信息检测传感器60和电动机旋转传感器62中的任一个,第二检测部50包括车速传感器54、曲柄旋转传感器56、加速度传感器58、位置信息检测传感器60和电动机旋转传感器62中的与第一检测部48不同的任一个。
140.控制部72被构成为当第一检测部48的输出是第一状态时根据第一检测部48的输出来控制组件38。控制部72被构成为当第一检测部48的输出不是第一状态时,根据多个检测部46中的与第一检测部48不同的预先确定的检测部的输出来控制组件38。预先确定的检测部包括第二检测部50,但是第一检测部48所包括的传感器和第二检测部50所包括的传感器的组合并不限于此。也可以第一检测部48包括曲柄旋转传感器56,第二检测部50包括车速传感器54。表1示出第一检测部48所包括的传感器和第二检测部50所包括的传感器的组合。
141.【表1】
142.组合例第一检测部第二检测部1速度传感器曲柄旋转传感器2速度传感器加速度传感器3速度传感器位置信息检测传感器4速度传感器电动机旋转传感器5曲柄旋转传感器速度传感器6曲柄旋转传感器加速度传感器7曲柄旋转传感器位置信息检测传感器8曲柄旋转传感器电动机旋转传感器9加速度传感器速度传感器10加速度传感器曲柄旋转传感器11加速度传感器位置信息检测传感器
12加速度传感器电动机旋转传感器13位置信息检测传感器速度传感器14位置信息检测传感器曲柄旋转传感器15位置信息检测传感器加速度传感器16位置信息检测传感器电动机旋转传感器17电动机旋转传感器速度传感器18电动机旋转传感器曲柄旋转传感器19电动机旋转传感器加速度传感器20电动机旋转传感器位置信息检测传感器
143.参照图5,说明根据第一检测部48的输出状态控制组件38的处理。如果向控制部72供给电力,则控制部72开始处理并转移至图5所示的流程图的步骤s32。如果图5的流程图结束,则控制部72在预先确定的周期后在电力的供给停止前反复进行从步骤s32开始的处理。
144.控制部72在步骤s32中判定第一检测部48的输出状态是否为第一状态。控制部72当第一检测部48的输出状态是第一状态时转移至步骤s33。控制部72在步骤s33中根据第一检测部48的输出来控制组件38。控制部72在步骤s33中例如以与步骤s13和步骤s14同样的方式根据第一检测部48的输出来控制电动机40。
145.控制部72在步骤s32中当第一检测部48的输出状态不是第一状态时转移至步骤s34。控制部72在步骤s34中使通知部42通知预先确定的通知信息并转移至步骤s35。控制部72例如使通知部42通知第一检测部48的错误。控制部72在步骤s35中根据预先确定的检测部的输出来控制组件38。在第二检测部50是曲柄旋转传感器56的情况下,控制部72在步骤s35中例如以与图4的步骤s16、步骤s17、步骤s19到步骤s21和步骤s22到s26同样的方式根据曲柄旋转传感器56的输出来控制电动机40。
146.《第三实施方式》
147.参照图6和图7,对第三实施方式的控制装置70进行说明。第三实施方式的控制装置70除了控制部72能够根据第三检测部66和第四检测部68来控制组件38的方面以外,与第一实施方式和第二实施方式的控制装置70相同,因此与第一实施方式和第二实施方式共同的构成赋予与第一实施方式相同的符号,省略重复的说明。
148.多个检测部46包括第一检测部48。多个检测部46还包括第二检测部50。多个检测部46还包括第三检测部66。多个检测部46还包括第四检测部68。第三检测部66被构成为检测与车速v相关的第三信息。第三信息包含第三参数p3。第一参数p1与第三参数p3相关。第一信息能够根据第三信息推定。第四检测部68被构成为检测与车速v相关的第四信息。第四信息包含第四参数p4。第一参数p1与第四参数p4相关。第一信息能够根据第四信息推定。
149.第一检测部48、第二检测部50、第三检测部66和第四检测部68包括车速传感器54、曲柄旋转传感器56、加速度传感器58、位置信息检测传感器60和电动机旋转传感器62中的各不相同的一个。第一检测部48较优选包括车速传感器54。第二检测部50较优选包括曲柄旋转传感器56和加速度传感器58中的一方。第三检测部66较优选包括曲柄旋转传感器56和加速度传感器58中的另一方。例如,第一检测部48包括车速传感器54,第二检测部50包括曲柄旋转传感器56,第三检测部66包括加速度传感器58,第四检测部68包括位置信息检测传感器60,但是第一检测部48所包括的传感器、第二检测部50所包括的传感器、第三检测部66
所包括的传感器及第四检测部68所包括传感器的组合并不限于此。表2示出包含于第一检测部48、第二检测部50、第三检测部66和第四检测部68的传感器的组合中的两个例子。包含于第一检测部48、第二检测部50、第三检测部66和第四检测部68的传感器的组合具有多个,因此在表2中仅示出较优选的组合的两个例子。
150.【表2】
151.组合例第一检测部第二检测部第三检测部第四检测部1车速传感器曲柄旋转传感器加速度传感器位置信息检测传感器2车速传感器加速度传感器曲柄旋转传感器位置信息检测传感器
152.预先确定的检测部较优选包括第二检测部50。当第一检测部48的输出不是第一状态、且第二检测部50的输出是第二状态时,控制部72被构成为根据第二检测部50的输出来控制组件38。
153.预先确定的检测部较优选包括第三检测部66。当第一检测部48的输出不是第一状态、且第二检测部50的输出不是第二状态时,控制部72被构成为根据第三检测部66的输出来控制组件38。
154.当第二检测部50的输出是第二状态时,控制部72判定为输入控制部72的第二检测部50的输出正常。当第二检测部50的输出不是第二状态时,控制部72判定为输入控制部72的第二检测部50的输出不正常。
155.在第三例中,当第二检测部50的输出不是第二状态时,从第二检测部50输出的信号包含预先确定的第二信号。预先确定的第二信号包含第二检测部50的输出异常信号。异常信号例如在第二检测部50发生故障的情况、第二检测部50与控制部72的连接存在异常的情况、第二检测部50不是预先确定的构成的情况及第二检测部50与控制部72的连接部不是预先确定的构成的情况中的至少任一种情况下产生。
156.在第四例中,当第二检测部50的输出不是第二状态时,不从第二检测部50输出信号。不从第二检测部50输出信号的情况包括在人力驱动车10没有搭载第二检测部50的情况、没有向第二检测部50供给电力的情况及没连接第二检测部50与控制部72的情况中的至少一种。控制部72可以在第三例和第四例中的至少一个的情况下判定为第二检测部50的输出不是第二状态。
157.预先确定的检测部较优选包括第三检测部66和第四检测部68。控制部72被构成为当第一检测部48的输出不是第一状态、且第二检测部50的输出不是第二状态、且第三检测部66为第三状态时,根据第三检测部66的输出来控制组件38。控制部72被构成为当第一检测部48的输出不是第一状态、且第二检测部50的输出不是第二状态、且第三检测部66不是第三状态时,根据第四检测部68的输出来控制组件38。
158.当第三检测部66的输出是第三状态时,控制部72判定为输入到控制部72的第三检测部66的输出正常。当第三检测部66的输出不是第三状态时,控制部72判定为输入到控制部72的第三检测部66的输出不正常。
159.在第五例中,当第三检测部66的输出不是第三状态时,从第三检测部66输出的信号包含预先确定的第三信号。预先确定的第三信号包含第三检测部66的输出异常信号。异常信号例如在第三检测部66发生故障的情况、第三检测部66与控制部72的连接存在异常的情况、第三检测部66不是预先确定的构成的情况及第三检测部66与控制部72之间的连接部
不是预先确定的构成的情况中的至少任一种情况下产生。
160.在第六例中,当第三检测部66的输出不是第三状态时,不从第三检测部66输出信号。不从第三检测部66输出信号的情况包括在人力驱动车10没有搭载第三检测部66的情况、没有向第三检测部66供给电力的情况及没有连接第三检测部66与控制部72的情况中的至少一种。控制部72可以在第五例和第六例中的至一种情况下判定为第三检测部66的输出不是第三状态。
161.较优选的是,控制部72被构成为当第一检测部48的输出不是第一状态、且第二检测部50的输出是第二状态时,根据基于第二信息计算出的第二参数p2来推定第一参数p1,并且根据推定的第一参数p1来控制组件38。
162.较优选的是,控制部72被构成为当第一检测部48的输出是第一状态、且第二检测部50的输出是第二状态时,根据第一检测部48和第二检测部50中的至少一个的输出来控制组件38。较优选的是,控制部72被构成为当第一检测部48的输出不是第一状态、且第二检测部50的输出是第二状态时,根据第二检测部50的输出且不依赖于第一检测部48的输出来控制组件38。较优选的是,控制部72被构成为当第一检测部48的输出是第一状态、且第二检测部50的输出不是第二状态时,根据第一检测部48的输出且不依赖于第二检测部50的输出来控制组件38。
163.较优选的是,控制部72当第一检测部48的输出不是第一状态时使通知部42通知预先确定的第一通知信息。预先确定的第一通知信息包括与预先确定的通知信息相同的信息。较优选的是,控制部72当第二检测部50的输出不是第二状态时使通知部42通知预先确定的第二通知信息。较优选的是,控制部72当第三检测部66的输出不是第三状态时使通知部42通知预先确定的第三通知信息。预先确定的第一通知信息被构成为能够向用户通知第一检测部48的错误。预先确定的第二通知信息被构成为能够向用户通知第一检测部48和第二检测部50中的至少一个错误。预先确定的第二通知信息较优选被构成为能够向用户通知第一检测部48和第二检测部50的错误。预先确定的第三通知信息被构成为能够向用户通知第一检测部48、第二检测部50和第三检测部66中的至少一个的错误。预先确定的第三通知信息较优选被构成为能够向用户通知第一检测部48、第二检测部50和第三检测部66的错误。在通知部42包括显示部的情况下,预先确定的第一通知信息、预先确定的第二通知信息和预先确定的第三通知信息例如包含文字和图像中的至少一个。在通知部42包括扬声器的情况下,预先确定的第一通知信息、预先确定的第二通知信息和预先确定的第三通知信息例如包括声音和警告音中的至少一个。较优选的是,通知部42当第一检测部48的输出不是第一状态时,持续进行通知直到成为第一状态为止。通知部42例如可以持续进行通知,也可以断续地进行通知,直到第一检测部48的输出成为第一状态、且第二检测部的输出成为第二状态为止。通知部42例如可以持续进行通知,也可以断续地进行通知,直到第一检测部48的输出成为第一状态、第二检测部的输出成为第二状态、且第三检测部的输出成为第三状态为止。
164.参照图7,说明根据第一检测部48的输出状态来控制组件38的处理。如果向控制部72供给电力,则控制部72开始处理并转移至图7所示的流程图的步骤s42。如果图7的流程图结束,则控制部72在预先确定的周期后在电力的供给停止前反复进行从步骤s42开始的处理。
165.控制部72在步骤s42中判定第一检测部48的输出状态是否为第一状态。控制部72当第一检测部48的输出状态是第一状态时转移至步骤s43。控制部72在步骤s43中根据第一检测部48的输出来控制组件38。控制部72在步骤s43中例如以与步骤s13和步骤s14同样的方式根据第一检测部48的输出来控制电动机40。
166.控制部72在步骤s42中当第一检测部48的输出状态不是第一状态时转移至步骤s44。控制部72在步骤s44中判定第二检测部50的输出状态是否为第二状态。控制部72当第二检测部50的输出状态是第二状态时转移至步骤s45。控制部72在步骤s45中使通知部42通知预先确定的第一通知信息并转移至步骤s46。控制部72在步骤s46中根据第二检测部50的输出来控制组件38。在第二检测部50是曲柄旋转传感器56的情况下,控制部72在步骤s46中例如以与图4的步骤s16、步骤s17、步骤s19到步骤s21及步骤s22到步骤s26同样的方式根据曲柄旋转传感器56的输出来控制电动机40。
167.控制部72在步骤s44中当第二检测部50的输出状态不是第二状态时转移至步骤s47。控制部72在步骤s47中判定第三检测部66的输出状态是否为第三状态。控制部72当第三检测部66的输出状态是第三状态时转移至步骤s48。控制部72在步骤s48中使通知部42通知预先确定的第二通知信息并转移至步骤s49。控制部72在步骤s49中根据第三检测部66的输出来控制组件38。在第三检测部66包括加速度传感器58的情况下,控制部72在步骤s49中使用根据加速度传感器58的输出推定的车速v,以与图3的步骤s13和步骤s14同样的方式控制电动机40。
168.控制部72在步骤s47中当第三检测部66的输出状态不是第三状态时转移至步骤s50。控制部72在步骤s50中使通知部42通知预先确定的第三通知信息并转移至步骤s51。控制部72在步骤s51中根据第四检测部68的输出来控制组件38。在第四检测部68包括位置信息检测传感器60的情况下,控制部72在步骤s51中使用根据位置信息检测传感器60的输出推定的车速v,以与图3的步骤s13和步骤s14同样的方式控制电动机40。
169.《第四实施方式》
170.参照图2及图8对第四实施方式的控制装置70进行说明。第四实施方式的控制装置70除了控制部72根据第一检测部48及第二检测部50的输出状态控制组件38以使得组件38成为预先确定的状态这一点以外,与第一实施方式的控制装置70相同,因此,对与第一实施方式共同的构成赋予与第一实施方式相同的符号,省略重复的说明。
171.在本实施方式中,人力驱动车10具备人力驱动车用的组件38以及多个检测部46,该多个检测部46被构成为检测与人力驱动车10的车速v相关的信息,并且与车速v相关的信息相互不同。多个检测部46包括第一检测部48和第二检测部50。
172.控制装置70包括控制部72。当第一检测部48的输出是第一状态时且当第二检测部50的输出是第二状态时,控制部72根据第一检测部48及第二检测部50中的至少一个的输出来控制组件38。当第一检测部48的输出不是第一状态时,控制部72不依赖于第二检测部50的输出,而是控制组件38使得组件38成为预先确定的状态。当第二检测部50的输出不是第二状态时,控制部72不依赖于第一检测部48的输出,而是控制组件38以使得组件38成为预先确定的状态。
173.较为优选的是,第一检测部48被构成为检测与车速v相关的第三信息,第二检测部50被构成为检测与车速v相关的第四信息,第三信息和第四信息相互关联。在本实施方式
中,第一检测部48和第二检测部50的组合例如能够适用第二实施方式的表1的组合。
174.较为优选的是,控制部72被构成为当第一检测部48的输出是第一状态、且第二检测部50的输出是第二状态时,根据第三信息和第四信息两方来控制组件38。较为优选的是,当第一检测部48的输出是第一状态、且第二检测部50的输出是第二状态时,控制部72执行对与第三信息预先建立对应的组件38的控制,并执行对与第四信息预先建立对应的组件38的控制。例如,在第一检测部48及第二检测部50中的一方包括车速传感器54、且第一检测部48和第二检测部50中的另一方包括曲柄旋转传感器56的情况下,当第一检测部48的输出是第一状态、且第二检测部50的输出是第二状态时,控制部72根据与车速传感器54的输出对应的车速v来控制组件38,并根据与曲柄旋转传感器56的输出对应的曲柄12的旋转速度n来控制组件38。较为优选的是,当第一检测部48的输出是第一状态、且第二检测部50的输出是第二状态时,控制部72不使用从第三信息推断出第四信息的值或者从第四信息推断出第三信息的值控制组件38。
175.在本实施方式中,较为优选的是,组件38包括电动促动器39。预先确定的状态包括电动促动器39不进行动作的状态。在电动促动器39为电动机40的情况下,较为优选的是,预先确定的状态包括电动机40停止的状态。在电动致动器39为电动机40的情况下,预先确定的状态也可以包括抑制电动机40的辅助力m的状态。
176.参照图8对根据多个检测部46的输出状态来控制组件38的处理进行说明。如果向控制部72供给了电力,则控制部72开始处理并转移至图8所示的流程图的步骤s81。如果图8的流程图结束了,则控制部72在预先确定的周期后在电力的供给停止前反复进行从步骤s81开始的处理。
177.控制部72在步骤s81中判定第一检测部48的输出是否为第一状态。当第一检测部48的输出是第一状态时,控制部72转移至步骤s82。控制部72在步骤s82中判定第二检测部50的输出是否为第二状态。当第二检测部50的输出是第二状态时,控制部72转移至步骤s83。控制部72在步骤s83中根据第一检测部48及第二检测部50的输出来控制组件38并结束处理。
178.当在步骤s81中第一检测部48的输出不是第一状态时,控制部72转移至步骤s84。当在步骤s82中第二检测部50的输出不是第二状态时,控制部72转移至步骤s84。控制部72也可以更换步骤s81和步骤s82的处理的内容。当第一检测部48的输出不是第一状态时及当第二检测部50的输出不是第二状态时,控制部72通过步骤s81及步骤s82转移至步骤s84。
179.控制部72在步骤s84中使通知部42通知预先确定的通知信息,并转移至步骤s85。控制部72在步骤s85中控制组件38以使得组件38成为预先确定的状态,并结束处理。
180.《第五实施方式》
181.参照图2和图9对第五实施方式的控制装置70进行说明。除了控制部72根据第三信息及第四信息进行控制以使得组件38成为预先确定的状态这一点之外,第五实施方式的控制装置70与第一实施方式的控制装置70相同,因此对与第一实施方式共同的构成,赋予与第一实施方式相同的符号,并省略重复的说明。
182.在本实施方式中,人力驱动车10具备:人力驱动车用的组件38;以及多个检测部46,该多个检测部46被构成为检测与人力驱动车10的车速v相关的信息,并且与车速v相关的信息相互不同。多个检测部46包括第一检测部48和第二检测部50。
183.控制装置70包括控制部72。当第一检测部48输出的与人力驱动车10的车速v相关的第三信息和第二检测部50输出的与人力驱动车10的车速v相关的第四信息中的至少一个是与在人力驱动车10的车速v为预先确定的速度vx以上的情况对应时,控制部72控制组件38以使得组件38成为预先确定的状态。在本实施方式中,第一检测部48和第二检测部50的组合例如能够适用第二实施方式的表1的组合。例如,当第一检测部48是车速传感器54、第二检测部50是曲柄旋转传感器56时,第三信息是根据车速传感器54的输出计算出的车速v,第四信息是根据曲柄旋转传感器56的输出推定的车速v。
184.较为优选的是,当第三信息和第四信息中的一个是与人力驱动车10的车速v为预先确定的速度vx以上的情况对应时,控制部72控制组件38以使得组件38成为预先确定的状态。因为当第三信息和第四信息中的一个是与人力驱动车10的车速v为预先确定的速度vx以上的情况对应时,控制部72控制组件38以使得组件38成为预先确定的状态,因此,例如即使当第一检测部48不是第一状态时,或者第二检测部50不是第二状态时,也能够抑制在车速v为预先确定的速度vx以上的情况下组件38不变为预先确定的状态。
185.在本实施方式中,较为优选的是,组件38包括电动促动器39。预先确定的状态包括电动促动器39不进行动作的状态。当电动促动器39为电动机40时,预先确定的状态包括电动机40停止的状态。当电动致动器39为电动机40时,预先确定的状态包括抑制电动机40的辅助力m的状态。
186.较为优选的是,当第三信息和第四信息中的至少一个是与人力驱动车10的车速v为预先确定的速度vx以上的情况对应时,控制部72使通知部42通知预先确定的通知信息。预先确定的通知信息被构成为能够通知用户第三信息和第四信息中的至少一个是与人力驱动车10的车速v为预先确定的速度vx以上的情况对应的状态。在通知部42包括显示部的情况下,例如,预先确定的通知信息包括文字和图像中的至少一个。在通知部42包括扬声器的情况下,例如,预先确定的通知信息包括声音和警告音中的至少一个。当第一检测部48的输出不是第一状态时,通知部42例如既可以持续地进行通知,也可以断续地进行通知,直到变为第一状态。
187.参照图9对根据多个检测部46的输出状态来控制组件38的处理进行说明。如果向控制部72供给了电力,则控制部72开始处理并转移至图9所示的流程图的步骤s91转移。如果图9的流程图结束了,则控制部72在预先确定的周期后在电力的供给停止前反复进行从步骤s91开始的处理。
188.控制部72在步骤s91中判定第三信息是否与车速v为预先确定的速度vx以上的情况对应。当第三信息与车速v为预先确定的速度vx以上的情况不对应时,控制部72转移至步骤s92。控制部72在步骤s92中判定第四信息是否与车速v为预先确定的速度vx以上的情况对应。当第四信息与车速v为预先确定的速度vx以上的情况不对应时,控制部72结束处理。
189.控制部72在步骤s91中当第三信息是与车速v为预先确定的速度vx以上的情况对应时,转移至步骤s93。控制部72在步骤s92中当第四信息是与车速v为预先确定的速度vx以上的情况对应时,转移至步骤s93。控制部72也可以更换步骤s91和步骤s92的处理的内容。当第三信息是与车速v为预先确定的速度vx以上的情况对应时及当第四信息是与车速v为预先确定的速度vx以上的情况对应时,控制部72通过步骤s91及步骤s92转移至步骤s93。
190.控制部72在步骤s93中使通知部42通知预先确定的通知信息,并转移至步骤s94。
控制部72在步骤s94中控制组件38以使得组件38成为预先确定的状态,并结束处理。
191.《变形例》
192.与实施方式相关的说明是本公开的人力驱动车用的控制装置可以采用的方式的例示,并且不是旨在限制它的方式。本公开的人力驱动车用的控制装置例如可以采用如下所示的实施方式的变形例和组合了相互不矛盾的至少两个变形例的方式。在以下的变形例中,对与实施方式的方式共同的部分赋予与实施方式相同的符号并省略其说明。
193.■
在包括第一实施方式或第一实施方式的变形例的实施方式中,可以从图3和图4的流程图中省略步骤s16和步骤s22到步骤s26。在这种情况下,当步骤s15中为“是”时转移至步骤s17。
194.■
在包括第一实施方式或第一实施方式的变形例的实施方式中,可以从图3和图4的流程图中省略步骤s16到步骤s21。在这种情况下,当步骤s15中为“是”时转移至步骤s22。在该变形例中,人力驱动车10包括检测人力驱动车10的变速比r的变速状态传感器65,控制部72使用根据变速状态传感器65的输出获取的当前的变速比r来推定车速v。
195.■
在包括第三实施方式或第三实施方式的变形例的实施方式中,多个检测部46可以包括五个以上的检测部46。在这种情况下,在第一检测部48、第二检测部50、第三检测部66和第四检测部68为不能用于组件38的控制的状态的情况下,根据多个检测部46中的第一检测部48、第二检测部50、第三检测部66和第四检测部68以外的检测部46的输出来控制组件38。当第四检测部68的输出为第四状态时,控制部72判定为输入控制部72的第四检测部68的输出正常。当第四检测部68的输出不是第四状态时,控制部72判定为输入到控制部72的第四检测部68的输出不正常。
196.在第七例中,当第四检测部68的输出不是第四状态时,从第四检测部68输出的信号包含预先确定的第四信号。预先确定的第四信号包含第四检测部68的输出异常信号。异常信号例如在第四检测部68发生故障的情况、第四检测部68与控制部72的连接存在异常的情况、第四检测部68不是预先确定的构成的情况及第四检测部68与控制部72之间的连接部不是预先确定的构成的情况中的至少任一种情况下产生。
197.在第八例中,当第四检测部68的输出不是第四状态时,不从第四检测部68输出信号。不从第四检测部68输出信号的情况包括在人力驱动车10没有搭载第四检测部的情况、没有向第四检测部供给电力的情况及没连接第四检测部68与控制部72的情况中的至少一种。控制部72可以在第七例和第八例中的至少一个的情况下判定为第四检测部68的输出不是第四状态。当第一检测部48的输出不是第一状态、且第二检测部50的输出不是第二状态、且第三检测部66不是第三状态时、且第四检测部68不是第四状态时,控制部72被构成为根据第一检测部48、第二检测部50、第三检测部66和第四检测部68以外的检测部46的输出来控制组件38。
198.■
在包括第三实施方式或第三实施方式的变形例的实施方式中,可以从图7的流程图中省略步骤s47、步骤s50和步骤s51而作为图8的流程图。在图8中,控制部72当步骤s44中为“否”时转移至步骤s48。在该变形例中,可以从多个检测部46中省略第四检测部68。
199.■
在包括第二实施方式、第三实施方式、第二实施方式的变形例或第三实施方式的变形例的实施方式中,当多个检测部46全部处于不能用于组件38的控制的状态时,控制部72可以停止控制组件38,也可以控制成使组件38停止。当多个检测部46的全部处于不能
用于组件38的控制的状态时、且组件38包括电动机40的情况下,控制部72可以使电动机40停止。第一检测部48不能用于组件38的控制的状态对应于不是第一状态的情况。第二检测部50不能用于组件38的控制的状态对应于不是第二状态的情况。第三检测部66不能用于组件38的控制的状态对应于不是第三状态的情况。第四检测部68不能用于组件38的控制的状态对应于不是第四状态的情况。例如,将图8的步骤s49变更为图11的步骤s60。在图11中,控制部72在执行步骤s48的处理后转移至步骤s60。控制部72在步骤s60中使电动机40停止并结束处理。控制部72在电动机40驱动着的情况下在步骤s60中使电动机40停止。控制部72在电动机40为停止着的情况下在步骤s60中保持电动机40的停止。
200.■
在包括第一实施方式或第一变形例的实施方式中,当车速传感器54的输出不是第一状态、曲柄旋转传感器56的输出是第二状态时,控制部72可以停止控制组件38,也可以控制成使组件38停止。例如,当步骤s15中为“是”时,控制部72可以判定曲柄旋转传感器56的输出是否为第二状态。当曲柄旋转传感器56的输出为第二状态时,控制部72也可以转移至步骤s16、步骤s17或步骤s18。
201.■
在包括第二实施方式、第三实施方式、第二实施方式的变形例或第三实施方式的变形例的实施方式中,控制部72可以被构成为当第一检测部48的输出是第一状态、且第二检测部50的输出不是第二状态时,根据基于第一信息计算出的第一参数p1来推定第二参数p2,并且根据推定的第二参数p2来控制组件38。例如,在第一检测部48是车速传感器54、第二检测部50是曲柄旋转传感器56的情况下,并且当第一检测部48的输出是第一状态、且第二检测部50的输出不是第二状态时,根据从由车速传感器54的输出计算出的车速v推定的曲柄12的旋转速度n来控制组件38。控制部72例如通过将车速v除以变速比r和后轮14a的周长来推定曲柄12的旋转速度n。
202.■
在包括第一实施方式、第二实施方式、第三实施方式、第四实施方式、第五实施方式、第一实施方式的变形例、第二实施方式的变形例、第三实施方式的变形例、第四实施方式的变形例、或第五实施方式的变形例的实施方式中,组件38也可以包括电动机40以外的组件。例如,组件38代替电动机40或除了电动机40以外,包括通知部42、变速器44、电动制动装置、电动可调车座支柱、电动悬架和灯中的至少一个。
203.在该变形例中,在包括第四实施方式、第五实施方式、第四实施方式的变形例、或第五实施方式的变形例的情况下,预先确定的状态也可以是抑制驱动组件38的频度的状态。例如,在组件38包括变速器44的情况下,预先确定的状态包括抑制通过变速器44来变更变速比r的频度的状态。
204.■
在包括第二实施方式、第三实施方式、第二实施方式的变形例或第三实施方式的变形例的实施方式中,第一检测部48和第二检测部50的至少一个可以是不检测与车速v相关的信息的传感器。在这种情况下,通过第一检测部48检测的第一信息和第二检测部50检测的第二信息相互关联,能够适当地控制组件38。例如,第一检测部48包括检测人力驱动车10的车身16的俯仰角度的倾斜传感器,第二检测部50包括位置信息检测传感器60。控制部72被构成为根据从gps接收部接收到的位置信息,使用预先存储于存储部74的地图信息所包含的道路的坡度信息,推定人力驱动车10的车身16的俯仰角度。控制部72被构成为当第一检测部48的输出是第一状态、且第二检测部50的输出是第二状态时,根据第一检测部48和第二检测部50中的至少一个的输出来控制组件38。控制部72被构成为当第一检测部48
的输出不是第一状态、且第二检测部50的输出是第二状态时,根据第二检测部50的输出且不依赖于第一检测部48的输出来控制组件38。控制部72被构成为当第一检测部48的输出是第一状态、且第二检测部50的输出不是第二状态时,根据第一检测部48的输出且不依赖于第二检测部50的输出来控制组件38。
205.■
在包括第三实施方式或第三实施方式的变形例的实施方式中,控制部72可以被构成为在获取和不获取与变速档相关的信息的情况下执行分别不同的处理。例如,控制部72当图7的步骤s42中为“否”时转移至图13的步骤s61。控制部72在步骤s61中判定是否获取与变速档相关的信息。控制部72在获取与变速档相关的信息的情况下转移至步骤s44。控制部72在步骤s44以后执行与图7相同的处理。控制部72在不获取与变速档相关的信息的情况下转移至图13的步骤s62。控制部72在步骤s62中判定第三检测部66的输出是否为第三状态。控制部72当第三检测部66的输出是第三状态时转移至步骤s63。控制部72在步骤s63中使通知部42通知预先确定的第一通知信息并转移至步骤s64。控制部72在步骤s64中根据第三检测部66的输出来控制组件38。控制部72在步骤s62中当第三检测部66的输出不是第三状态时转移至步骤s65。控制部72在步骤s65中判定第二检测部50的输出状态是否为第二状态。控制部72当第二检测部50的输出状态是第二状态时转移至步骤s66。控制部72在步骤s66中使通知部42通知预先确定的第三通知信息并转移至步骤s67。控制部72在步骤s67中根据第二检测部50的输出来控制组件38并结束处理。控制部72在步骤s65中当第二检测部50的输出不是第二状态时转移至步骤s68。控制部72在步骤s68中使通知部42通知预先确定的第二信息并转移至步骤s69。控制部72在步骤s69中根据第四检测部68的输出来控制组件38并结束处理。在该变形例中,例如,当能够获取与变速档相关的信息的情况下能够更适当地推定第一参数p1的检测部46与在不能获取与变速档相关的信息的情况下能够更适当地推定第一参数p1的检测部46不同时,在能够获取和不能获取与变速档相关的信息的各种情况下,能够优先使用能够更适当地推定第一参数p1的检测部46来控制组件38。
206.■
控制部72被构成为当输入到曲柄12的人力驱动力h比预先确定的驱动力hx大、且第一检测部48的输出是第一状态时,根据第一检测部48的输出来控制组件38,并且也可以被构成为当输入到曲柄12的人力驱动力h比预先确定的驱动力hx大、且第一检测部48的输出不是第一状态时,根据多个检测部46中的与第一检测部48不同的预先确定的检测部的输出来控制38组件。例如,在图5的处理中增加图14的步骤s71的处理。在图14的流程图中,如果向控制部72供给电力,则控制部72开始处理并转移至步骤s71。如果图14的流程图结束,则控制部72在预先确定的周期后在停止电力的供给前反复进行从步骤s71开始的处理。控制部72在步骤s71中判定输入到曲柄12的人力驱动力h是否为预先确定的驱动力hx以上。控制部72当输入到曲柄12的人力驱动力h为预先确定的驱动力hx以上时转移至步骤s32。当输入到曲柄12的人力驱动力h不是预先确定的驱动力hx以上时结束处理。
207.■
在包括第四实施方式、或第四实施方式的变形例的实施方式中,控制部72也可以被构成为当第一检测部48的输出是第一状态、且第二检测部50的输出是第二状态时根据第三信息及第四信息中的至少一个来控制组件38。例如,控制部72执行图15的流程图的处理来代替图8的流程图的处理。在图15的流程图中,在图8的流程图中为步骤s83的处理变更为步骤s86的处理。控制部72在步骤s82中当第二检测部50的输出是第二状态时转移至步骤s86。控制部72在步骤s86中根据第一检测部48的输出来控制组件38,并结束处理。在该变形
例中,第二检测部50也可以在对组件38的控制中不被利用。
208.■
在包括第五实施方式、或第五实施方式的变形例的实施方式中,也可以是当第三信息和第四信息双方是与人力驱动车10的车速v为预先确定的速度vx以上的情况对应时,控制部72控制组件38以使得组件38成为预先确定的状态。例如,控制部72执行图16的流程图的处理来代替图9的流程图的处理。参照图16对根据多个检测部46的输出状态来控制组件38的处理进行说明。如果向控制部72供给了电力,则控制部72开始处理,并转移至图16所示的流程图的步骤s95。如果图16的流程图结束,则控制部72在预先确定的周期后在电力的供给停止前反复进行从步骤s95开始的处理。控制部72在步骤s95中判定第三信息是否与车速v为预先确定的速度vx以上的情况对应。当第三信息与车速v为预先确定的速度vx以上的情况不对应时,控制部72结束处理。当第三信息是与车速v为预先确定的速度vx以上的情况对应时,控制部72转移至步骤s96。控制部72在步骤s96中判定第四信息是否与车速v为预先确定的速度vx以上的情况对应。当第四信息与车速v为预先确定的速度vx以上的情况不对应时,控制部72结束处理。当第四信息是与车速v为预先确定的速度vx以上的情况对应时,控制部72转移至步骤s97。控制部72在步骤s97中使通知部42通知预先确定的通知信息,并转移至步骤s98。控制部72在步骤s98中控制组件38以使得组件38成为预先确定的状态,并结束处理。
209.也可以将包括第四实施方式或第四实施方式的变形例的实施方式与包括第五实施方式或第五实施方式的变形例的实施方式组合。例如,控制部72也可以独立地执行图8或图15的流程图的处理和图9或图16的流程图的处理。例如,控制部72也可以在图8的流程图的步骤s83中进行图9或图16的流程图的处理。例如,当在图8或图15的流程图的处理中要控制组件38以使得组件38成为预先确定的状态时,控制部72不依赖于图9或图16的流程图的处理,而是控制组件38以使得组件38成为预先确定的状态。例如,当在图9或图16的流程图的处理中要控制组件38以使得组件38成为预先确定的状态时,控制部72不依赖于图8或图15的流程图的处理,而是控制组件38以使得组件38成为预先确定的状态。
210.在包括第四实施方式、第五实施方式、第一实施方式的变形例、第二实施方式的变形例、第三实施方式的变形例、第四实施方式的变形例、或第五实施方式的变形例的实施方式中,可以省略通知部42。在该变形例中,例如能够省略图4的步骤s18、图4的步骤s23、图5的步骤s34、图7的步骤s45、图7的步骤s48、图7的步骤s50、图8的步骤s48、图9的步骤s93、图10的步骤s45、图10的步骤s48、图11的步骤s45、图11的步骤s48、图12的步骤s45、图12的步骤s48、图12的步骤s50、图13的步骤s63、图13的步骤s66和图13的步骤s68、图14的步骤s34、图15的步骤s84、及图16的步骤s97。
211.在本说明书中使用的“至少一个”的表现是指所期望的选项的“一个以上”。作为一例,本说明书中使用的“至少一个”的表现是指在选项的数量为两个时“仅一个选项”或“两个选项的双方”。作为另一个例子,在本说明书中使用的“至少一个”的表现是指在选项的数量为三个以上时“仅一个选项”或“两个以上的任意的选项的组合”。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1