翻转式攀爬全自动清洁机器人和方法
1.本发明属于隧道反光环清洗机器人技术领域,涉及一种翻转式攀爬全自动清洁机器人和方法。
背景技术:
2.高速公路隧道反光板主要是在隧道行车过程中起警示作用的环形设备,其反光原理是因为反光涂层上有玻璃微珠,使光发生折射和衍射,继而提醒司机注意隧道壁。但在长时间使用当中,灰尘等污垢的覆盖会导致反光能力下降。传统清洗隧道反光板常采用封闭半幅车道后用重型登高车+人工进行清洗,其费时费力。已有的隧道反光板清洗设备常基本上用夹紧原理,其运行缓慢,结构笨重,且由于现有隧道反光板背部工况较为复杂,夹紧机构较难夹紧,易发生掉落,不能很好满足智能化清洗隧道反光板要求。截至2018年12月28日,中国高速公路总里程已达14万千米,位居全球第一。这带来的是隧道反光板的数量激增,清洗困难的难题,现有清洗手段无法语圆满解决这一问题,市面上急需一种可靠的清洗隧道反光板的装置。基于吸附的清洗机器人已经广泛用于清洗玻璃幕墙,其技术成熟,安全可靠。将吸附技术应用于清洗隧道反光板,避开了对隧道反光版背部复杂工况的研究,且吸附方式难以移动和越障能力差。基于上述两大功能,设计了一款翻转式攀爬全自动清洁机器人,主要以面向高速公路上不便人工清洗的隧道内隧道反光环清洗日常使用。
技术实现要素:
3.本发明要解决的技术问题是:提供翻转式攀爬全自动清洁机器人和方法,以解决现有技术中存在的技术问题。
4.本发明采取的技术方案为:翻转式攀爬全自动清洁机器人,包括擦洗机构和吸附翻转行走机构,擦洗机构安装在吸附翻转行走机构上,吸附翻转行走机构用于在反光环上翻转行走。
5.优选的,上述擦洗机构包括清洗板和连接部,清洗板采用两块,通过连接杆对称连接在连接部的两侧,连接部连接到吸附翻转行走机构上,清洗板上安装有用于清洗的清洗组件。
6.优选的,上述清洗板行走方向两侧安装有一防脱夹紧机构,防脱夹紧机构包括压板、锁紧电机和机座,机座固定连接在清洗板端部,压板一端活动套接在螺栓上,另一端延伸到清洗板范围内,螺栓连接在机座,锁紧电机的电机轴设置为螺纹部,电机轴螺旋连接压板,锁紧电机固定连接在机座上。
7.优选的,上述连接部包括悬挂板和悬挂螺钉,悬挂板竖直固定连接在连接杆端部的竖直连接柱上,悬挂板上设置有竖直的条形沉头槽,悬挂螺钉活动穿过条形沉头槽后固定连接到吸附翻转行走机构的吸盘三底部。
8.优选的,上述吸附翻转行走机构采用两个正三角吸附翻转行走机构对称安装在擦洗机构两侧,正三角吸附翻转行走机构包括吸盘一、吸盘二、吸盘三、行走电机和真空泵,吸
盘一、吸盘二和吸盘三的背面分别垂直固定连接在连接板一、连接板二和连接板三,连接板一、连接板二和连接板三均通过一转轴连接到机架板上且三根转轴呈正三角对接布置,连接板三通过不完全齿与完全齿齿轮传动机构连接到行走电机,行走电机的电机轴安装有槽轮驱动机构带动连接板一、连接板二和连接板三翻转,真空泵均通过电动阀门和管道分别连接到吸盘一、吸盘二和吸盘三,真空泵安装在连接板三上。
9.优选的,上述不完全齿与完全齿齿轮传动机构包括三根转轴伸出机架板分别连接三个从动不完全齿轮,三个从动不完全齿轮分别啮合有三个主动不完全齿轮,三个主动不完全齿轮分别旋转连接在三根齿轮轴上,三根齿轮轴固定连接在机架板上且呈三角布置,三根齿轮轴分别旋转连接到三个从动齿轮,三个从动齿轮分别与对应的三个主动不完全齿轮固定连接,三个从动齿轮均相啮合到主动齿轮,主动齿轮固定连接在行走电机的电机轴,该电机轴旋转连接在机架板上。
10.优选的,上述槽轮驱动机构包括行走电机的电机轴固定连接有v字形的双拨叉,双拨叉嵌入到行走电机固定连接在两个对接的拨动槽内,两个对接的拨动槽分别设置在连接板一和连接板三与连接板二和连接板三上,电机旋转能够拨动连接板旋转,连接板一、连接板二和连接板三端口均设置有呈八字形的两个拨动槽。
11.优选的,上述吸盘一、吸盘二和吸盘三连接的三根转轴正对另一侧铰接到机架固定板,行走电机尾端固定连接在固定板上,固定板与擦洗机构的悬挂点连接。
12.优选的,上述连接板一和连接板二固定连接有电池盒和控制器。
13.优选的,上述吸盘一、吸盘二和吸盘三的吸盘腔内边长皆设置为长136mm和宽68mm。
14.翻转式攀爬全自动清洁机器人的清洗方法,该方法为:将智能翻转清洗机器人置于隧道反光板底部,并使智能翻转清洗机器人在该位置吸附于隧道反光板上、夹紧机构位于隧道反光板两端,随后启动设备,在电机作用下,带动由不完全齿轮构成的不完全齿轮机构和由拨叉和拨动槽构成的拨盘机构进行翻转,吸盘在真空泵抽气作用下达-53kpa真空度,取动摩擦系数为f=0.1,并考虑极端情况本发明智能翻转清洗机器人能竖直吸附于隧道反光板上,通过计算可得两吸盘能吸附竖向力为98n,可以将5kg左右重量的本发明悬挂于隧道反光板上。机器人采用翻转+吸附方式前进,并配合擦洗机构进行边行走边擦洗,针对直线移动时:两侧后一工位吸盘需先稳定产生-53kpa真空度将机器人吸附于隧道反光板上后,前一工位吸盘方由控制器控制真空泵对其进行放气处理,之后控制器控制电机进而控制两侧后一个吸盘进行旋转120度运行至待复位工位;此时,该两侧吸盘的下一工位吸盘在槽轮机构作用下旋转60度由中间工位运行至工作工位,原前一工位吸盘在槽轮机构作用下旋转60度由待复位工位运行至中间工位,按以上工步,机器人在隧道反光板上翻转前进;针对拐弯前进时:控制机器人两侧电机转速不同,使内侧电机转速小于外侧电机转速,在悬挂机构作用下即实现拐弯效果。
15.本发明的有益效果:与现有技术相比,本发明的效果如下:克服原有吸附型擦洗机器人吸附和行走的矛盾,使得擦洗机器人安全性可靠性得以提升。将原有的人工封闭隧道清洗模式转换为机器人自动清洗模式,极大的提高了工作效率和道路通行状况,采用翻滚设计,使得吸附清洗装置越障能力大大提高。
16.对于操作人员来说,该发明将他们从繁重的劳动当中解脱出来,只需进行紧急遥
控操作和放置机器人至隧道反光板底部即可;对于公路管理局来说,该发明使得清洗隧道反光板变得更有效率,且不用在采取封闭单侧隧道来进行人工清洗,增加了公路通勤能力。
附图说明
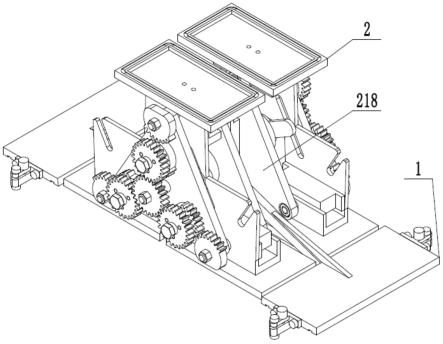
17.图 1为本发明的立体结构示意图;图2为本发明的侧视结构示意图;图3为图2中a-a剖面结构示意图;图4为本发明的俯视结构示意图;图5为本发明的仰视结构示意图;图6为本发明的前视结构示意图;图7为擦洗机构的立体结构示意图;图8为擦洗机构的侧视结构示意图;图9为吸附翻转行走机构的单侧立体结构示意图;图10为吸附翻转行走机构的单侧另一视角立体结构示意图;图11为吸附翻转行走机构的侧面结构示意图;图12为吸附翻转行走机构的后视结构示意图;图13为图11中a-a剖面结构示意图。
具体实施方式
18.下面结合具体的实施例对本发明进行进一步介绍。
19.实施例1:如图1-13所示,翻转式攀爬全自动清洁机器人,包括擦洗机构1和吸附翻转行走机构2,擦洗机构1安装在吸附翻转行走机构2上,吸附翻转行走机构2用于在反光环上翻转行走。
20.其中,擦洗机构1包括清洗板101和连接部102,清洗板101采用两块,通过连接杆103对称连接在连接部102的两侧,连接部102连接到吸附翻转行走机构2上,清洗板101上安装有用于清洗的清洗组件,双侧清洗,清洗更彻底。
21.上述清洗板101行走方向两侧安装有一防脱夹紧机构,防脱夹紧机构包括压板104、锁紧电机105和机座106,机座106固定连接在清洗板101端部,压板104一端活动套接在螺栓107上,另一端延伸到清洗板101范围内,螺栓107连接在机座106,锁紧电机105的电机轴设置为螺纹部,电机轴螺旋连接压板104,锁紧电机105固定连接在机座106上,通过外置夹紧机构,当智能机器人出现吸附力不足时,可以立即夹紧隧道反光板,防止掉落,而且行走过程中也能起到初步限位的作用。
22.上述连接部102包括悬挂板108和悬挂螺钉109,悬挂板108竖直固定连接在连接杆103端部的竖直连接柱上,悬挂板108上设置有竖直的条形沉头槽110,悬挂螺钉109活动穿过条形沉头槽110后固定连接到吸附翻转行走机构2的吸盘三203底部。
23.其中,吸附翻转行走机构2采用两个正三角吸附翻转行走机构对称安装在擦洗机构1两侧,正三角吸附翻转行走机构包括吸盘一201、吸盘二202、吸盘三203、行走电机204和真空泵205,吸盘一201、吸盘二202和吸盘三203的背面分别垂直固定连接在连接板一206、连接板二207和连接板三208,连接板一206、连接板二207和连接板三208均通过一转轴210
连接到机架板209上且三根转轴210呈正三角对接布置,连接板三208通过不完全齿与完全齿齿轮传动机构连接到行走电机204,行走电机204的电机轴安装有槽轮驱动机构带动连接板一206、连接板二207和连接板三208翻转,真空泵205均通过电动阀门和管道分别连接到吸盘一201、吸盘二202和吸盘三203,真空泵205安装在连接板三208上,每个吸盘设置有对应的电动阀门,便于独立控制,该吸附翻转机构,行走平稳可靠,其中不完全齿和完全齿齿轮机构做主运动,槽轮机构做复位运动,该机构翻转运动进行时始终有一个槽轮的吸盘和隧道反光板贴合。翻转过程中智能机器人整体做360度公转运动,槽轮盘做120度往复摆动,后一槽轮盘贴于反光板上一段时间后,前一槽轮盘进行复位运动实现整体机构往复滚动;在翻转运动进行的同时,吸附部分也在同时工作,后一槽轮盘贴于反光板上一段时间用于吸附,待吸附完成后,前一槽轮盘停止吸附,进行复位,吸附部分,采用真空泵装置,通过气管使各槽轮盘产生负压继而使机构吸附于隧道反光板上,通过控制各槽轮盘吸附腔负压值继而控制盘的吸附能力,采用翻滚结构,使得吸附清洗装置越障大大提高。
24.进一步,上述不完全齿与完全齿齿轮传动机构包括三根转轴210伸出机架板209分别连接三个从动不完全齿轮211,三个从动不完全齿轮211分别啮合有三个主动不完全齿轮212,三个主动不完全齿轮212分别旋转连接在三根齿轮轴213上,三根齿轮轴213固定连接在机架板209上且呈三角布置,三根齿轮轴213分别旋转连接到三个从动齿轮214,三个从动齿轮214分别与对应的三个主动不完全齿轮212固定连接,三个从动齿轮214均相啮合到主动齿轮215,主动齿轮215固定连接在行走电机204的电机轴,该电机轴旋转连接在机架板209上,三对不完全齿的布置和齿数需要满足能够翻转的条件,采用三对不完全齿传动和三对齿轮传动(一个驱动齿轮带动),传动稳定可靠,同一电机传动,结构紧凑,配合拨动机构能够实现吸盘精确的翻转。1.拨盘上不完全齿轮有8齿,占原齿轮120度。中间不完全齿轮也一样,不过有一个齿做切齿处理,2.中间圆柱齿轮和不完全齿轮交错装配,即每个齿相差360/24/2=7.5度,3.初始位置,三个中间不完全齿轮-齿轮机构相差120度配置,左后方中间不完全齿轮机构刚接触到左后方吸盘齿轮不完全齿轮,此时中间不完全齿轮机构,中间齿轮可与拨盘齿轮啮合,且吸盘齿轮轴心,中间不完全齿轮一个销孔,拨盘齿轮轴心刚好共线;将该状态中间不完全齿轮机构逆时针旋转120度得下一不完全齿轮机构初始位置,再旋转120得最后一不完全齿轮机构初始位置。且此时他们的吸盘齿轮轴心,中间不完全齿轮一个销孔,拨盘齿轮轴心刚好共线。
25.进一步,上述槽轮驱动机构包括行走电机207的电机轴固定连接有v字形的双拨叉216,双拨叉216嵌入到行走电机204固定连接在两个对接的拨动槽217内,两个对接的拨动槽217分别设置在连接板一206和连接板三208与连接板二207和连接板三208上,电机旋转能够拨动连接板旋转,连接板一206、连接板二207和连接板三208端口均设置有呈八字形的两个拨动槽217。
26.上述吸盘一201、吸盘二202和吸盘三203连接的三根转轴210正对另一侧铰接到机架固定板218,行走电机207尾端固定连接在固定板218上,固定板218与擦洗机构1的悬挂点连接。
27.上述连接板一206和连接板二207固定连接有电池盒219和控制器。
28.上述吸盘一201、吸盘二202和吸盘三203的吸盘腔内边长皆设置为长136mm和宽68mm。
29.本发明的具体工作原理过程: 请参阅图9-13,下述的工作工位为吸附状态,中间工位为位于顶部,待复位工位为与工作工位对称的非吸附状态。
30.翻转原理:图10-11中吸附翻转行走机构顺时针翻转,定义此时吸盘二202所处工位为待复位工位,吸盘三203所处工位为中间工位,吸盘一201所处工位为工作工位。为使吸附翻转行走机构顺时针翻转,此时行走电机204的电机轴逆时针旋转,带动双拨叉216逆时针旋转,双拨叉216和拨动槽217形成槽轮机构,此时吸盘二202、吸盘三203被带动顺时针旋转;同时带动主动齿轮215逆时针旋转,主动齿轮215带动从动齿轮214顺时针旋转,从动齿轮214带动不完全主动齿轮212逆时针转动,进而带动不完全从动齿轮211逆时针转动,由于不完全从动齿轮211和吸盘二202固定在一起,且三个不完全齿轮均分布置动作,因此,此时只带动盘二202做逆时针旋转,待行走电204输出轴逆时针旋转120度后,整个设备翻转了120度,吸盘二202至中间工位,吸盘三203至工作工位,吸盘一201至待复位工位。重复前述步骤,即可完整吸盘一201、吸盘三203和吸盘二202循环处于吸附状态,进而实现整个设备得翻转前进。
31.吸附原理:上述实现吸附和放气的过程通过控制真空泵连接的三通电动阀门控制开闭,三通电动阀门控制真空泵与吸盘连通和吸盘与外界连通两个工位。
32.待吸附工作准备完成后,采用上述的翻转原理进行翻转,在吸盘二202逆时针旋转的同时,两端翻转机构的中心位置高度会发生变化,由图7擦洗机构的悬架构件进行调节,且在翻转前进过程中擦洗板将会对隧道反光板进行擦洗。重复完成翻转多周后,完成隧道反光板的清洗。
33.转弯控制:两侧转速不一致,实现弯道的控制。
34.实施例2:翻转式攀爬全自动清洁机器人的清洗方法,该方法为:将智能翻转清洗机器人置于隧道反光板底部,并使智能翻转清洗机器人在该位置吸附于隧道反光板上、夹紧机构位于隧道反光板两端,随后启动设备,在电机作用下,带动由不完全齿轮构成的不完全齿轮机构和由拨叉和拨动槽构成的拨盘机构进行翻转,吸盘在真空泵抽气作用下达-53kpa真空度,各吸盘腔内边长皆为长136mm、宽68mm,取动摩擦系数为f=0.1,并考虑极端情况本发明智能翻转清洗机器人能竖直吸附于隧道反光板上,通过计算可得两吸盘能吸附竖向力为98n,可以将5kg左右重量的本发明悬挂于隧道反光板上。机器人采用翻转+吸附方式前进,并配合擦洗机构进行边行走边擦洗,针对直线移动时:两侧后一工位吸盘需先稳定产生-53kpa真空度将机器人吸附于隧道反光板上后,前一工位吸盘方由控制器控制真空泵对其进行放气处理,之后控制器控制电机进而控制两侧后一个吸盘进行旋转120度运行至待复位工位;此时,该两侧吸盘的下一工位吸盘在槽轮机构作用下旋转60度由中间工位运行至工作工位,原前一工位吸盘在槽轮机构作用下旋转60度由待复位工位运行至中间工位,按以上工步,机器人在隧道反光板上翻转前进;针对拐弯前进时:控制机器人两侧电机转速不同,使内侧电机转速小于外侧电机转速,在悬挂机构作用下即实现拐弯效果。在前进过程中擦洗机构擦洗板在夹紧机构作用下始终于隧道反光板保持接触,进行擦洗。当机器人遇到紧急情况导致吸附力不足产生掉落倾向时,夹紧机构在控制器作用下开始工作,夹住隧道反光板,避免机器人产生掉落。
35.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何
熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内,因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1