一种仿生机械虎
本技术涉及仿生动物模型领域,具体是指一种仿生机械虎。
背景技术:
1、仿生机械学是上世纪60年代初期出现的一门综合性的新兴边缘学科,它是生命科学与工程技术科学相互渗透、相互结合而形成的。包含着对生物现象进行力学研究,对生物的运动、动作进行工程分析,并把这些成果根据社会的要求付之实用化。
2、综合分析,目前市面上的产品存在以下缺点:
3、1.价格昂贵;
4、2.智能化程度较低;
5、3.控制系统复杂;
6、4.不能模仿动物真实的动作;
7、5.需要家长陪同使用。
8、从为解决国民对动物的了解,与仿生机械结构的研发,且为仿生机械创造更大的商业价值,并且以更低的成本,更稳的结构,更大的实用性。以及日后国内自主仿生机构的研发,从零到一的改变,进行了此次仿生智能机械虎的研发。
技术实现思路
1、本实用新型要解决的技术问题是,克服以上技术问题,提供一种能达到仿生要求、具有性能好、稳定性好、成本低、价值最优、控制简单,运行简便,能随时随地观赏并可进行互动的仿生机械虎。
2、为解决上述技术问题,本实用新型提供的技术方案为:一种仿生机械虎,包括机械虎本体,其特征在于:所述机械虎本体包括支架、前腿组件、后腿组件、脖子、虎头组件,所述支架两端分别设有前横梁和后横梁,前横梁两端均转动设有前腿支架,后横梁两端均转动设有后腿支架,所述前腿组件、后腿组件结构相同,均包括大腿和小腿,所述大腿顶部与其对应的前腿支架、后腿支架转动相连,大腿底部与小腿顶部转动相连,所述前腿支架、后腿支架内侧均固定连接有电机支架,电机支架上设有步进电机,所述步进电机输出端设有传动机构,通过传动机构带动大腿、小腿动作;所述脖子位于支架靠近前腿组件的一端,所述虎头组件与脖子相连,所述虎头组件包括虎头上和虎下颚,所述虎头上固定在脖子远离支架的一端,虎头上和虎下颚相互铰接,所述支架靠近脖子一端顶部铰接有后推杆,所述后推杆的伸缩端与脖子中部相互铰接,所述脖子下方铰接有前推杆,所述前推杆的伸缩端与虎下颚相互铰接;所述支架底部设有智能控制盒,智能控制盒内设有控制机构,所述控制机构包括单片机、语音控制模块、蓝牙控制模块。
3、进一步的,所述步进电机靠近电机支架的一侧设有减速器,且步进电机的输出端与减速器的输入端相连,所述减速器与电机支架固定相连。
4、进一步的,所述传动机构包括曲柄、动力板、直线滑轨和输出路径轨道板,所述曲柄一端与减速器输出端相连,动力板为l型结构,其顶部与曲柄远离减速器的一端相连,其底部末端与小腿转动相连,所述输出路径轨道板顶部与其对应的前腿支架、后腿支架转动相连,所述直线滑轨包括滑轨与滑块,所述滑块一侧与输出路径轨道板底部固定相连,另一侧滑动设置在滑轨上,所述滑轨远离滑块的一侧与动力板的拐角处转动相连。
5、进一步的,所述小腿底部设有脚,所述脚为板状,且顶部与小腿底部转动相连
6、进一步的,所述支架上方设有肋骨
7、进一步的,所述机械虎本体上装有红外线探测装置,红外线探测装置与单片机输入端相连。
8、进一步的,所述语音控制模块包括语音接受模块与语音播放模块,所述语音接受模块与单片机输入端相连,语音播放模块与单片机输出端相连。
9、本实用新型与现有技术相比的优点在于:本实用新型的仿生机械虎可以帮助青少年更好的了解动物,避免与真实动物接触造成误伤,并做到了操作简单,控制方便。使用者可独立操作也可通过语音控制或用手机蓝牙控制,操作更加智能化。
10、1.本作品主要结构运用了曲柄摇杆、连杆、直线滑轨、等简单的机械机构。通过电机带动曲柄摇杆及连杆运动,最大化模仿动物腿部肌肉的收缩与舒张状态。实现机械虎整体运动单元模仿老虎走路的动作。
11、2.直线滑轨与机械虎体结构形成肌肉的类三角结构,完成相应的动作。来自三角形的稳定性,与真实的虎骨,肌肉布局来进行设计。
12、3.作品运用了32单片机系统控制,整个系统分为语音控制和手机蓝牙控制两种模式,两种控制方式体现了智能一体的理念。并增加红外线传感器检测周围行人确保机械虎使用的安全性。
13、4.机械虎与市场现有产品相比,机械结构巧妙,价格低廉,运行稳定操作简单并且经过调研得到了社会上大多数小朋友的认可,可以为众多家庭所拥有。
技术特征:
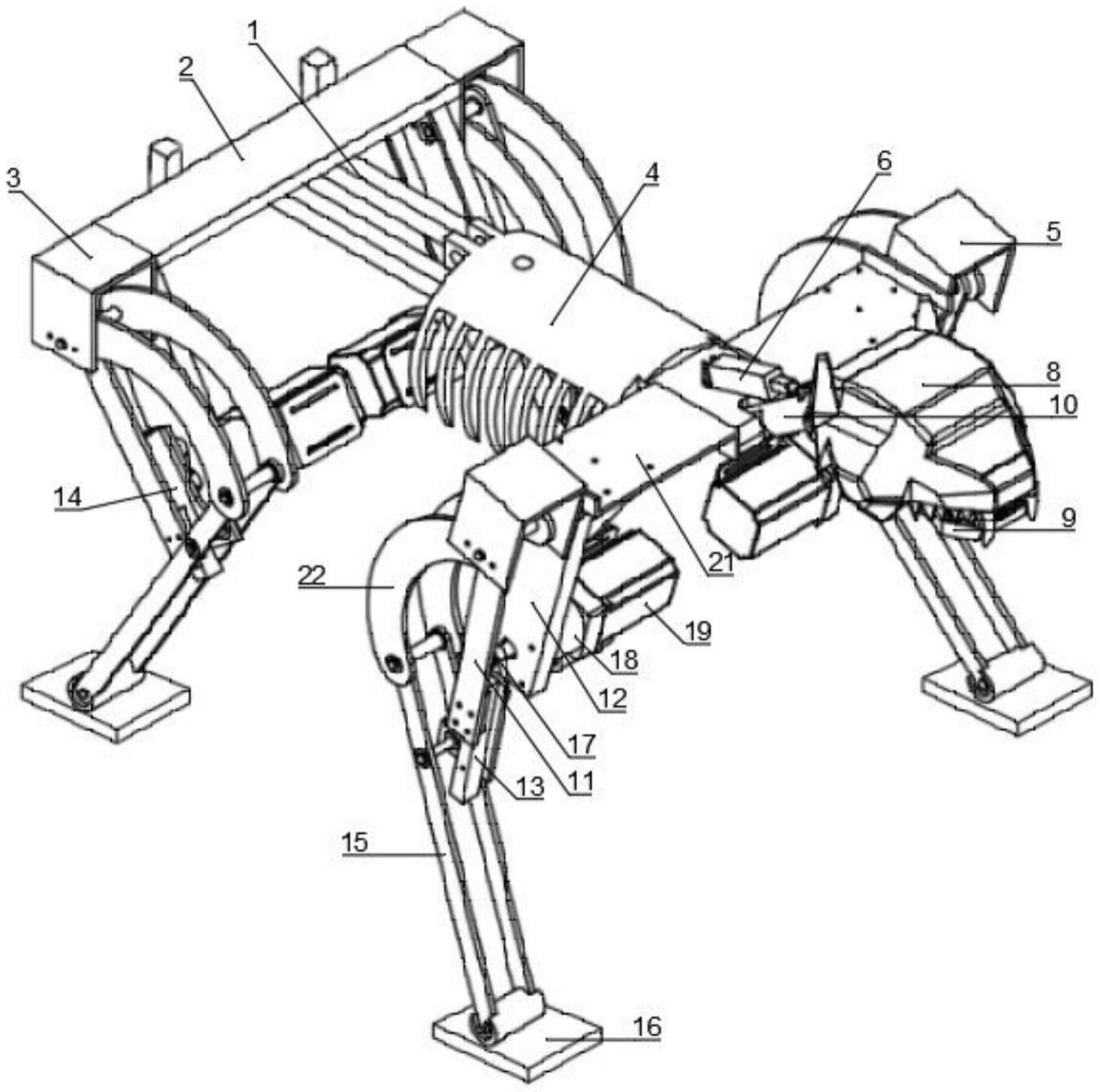
1.一种仿生机械虎,包括机械虎本体,其特征在于:所述机械虎本体包括支架(1)、前腿组件、后腿组件、脖子(10)、虎头组件,所述支架(1)两端分别设有前横梁(21)和后横梁(2),前横梁(21)两端均转动设有前腿支架(5),后横梁(2)两端均转动设有后腿支架(3),所述前腿组件、后腿组件结构相同,均包括大腿(22)和小腿(15),所述大腿(22)顶部与其对应的前腿支架(5)、后腿支架(3)转动相连,大腿(22)底部与小腿(15)顶部转动相连,所述前腿支架(5)、后腿支架(3)内侧均固定连接有电机支架(12),电机支架(12)上设有步进电机(19),所述步进电机(19)输出端设有传动机构,通过传动机构带动大腿(22)、小腿(15)动作;所述脖子(10)位于支架(1)靠近前腿组件的一端,所述虎头组件与脖子(10)相连,所述虎头组件包括虎头上(8)和虎下颚(9),所述虎头上(8)固定在脖子(10)远离支架(1)的一端,虎头上(8)和虎下颚(9)相互铰接,所述支架(1)靠近脖子(10)一端顶部铰接有后推杆(6),所述后推杆(6)的伸缩端与脖子(10)中部相互铰接,所述脖子(10)下方铰接有前推杆(7),所述前推杆(7)的伸缩端与虎下颚(9)相互铰接;所述支架底部设有智能控制盒(20),智能控制盒(20)内设有控制机构,所述控制机构包括单片机、语音模块、蓝牙模块。
2.根据权利要求1所述的一种仿生机械虎,其特征在于:所述步进电机(19)靠近电机支架(12)的一侧设有减速器(18),且步进电机(19)的输出端与减速器(18)的输入端相连,所述减速器(18)与电机支架(12)固定相连。
3.根据权利要求1所述的一种仿生机械虎,其特征在于:所述传动机构包括曲柄(17)、动力板(14)、直线滑轨(13)和输出路径轨道板(11),所述曲柄(17)一端与减速器(18)输出端相连,动力板(14)为l型结构,其顶部与曲柄(17)远离减速器(18)的一端相连,其底部末端与小腿(15)转动相连,所述输出路径轨道板(11)顶部与其对应的前腿支架(5)、后腿支架(3)转动相连,所述直线滑轨(13)包括滑轨与滑块,所述滑块一侧与输出路径轨道板(11)底部固定相连,另一侧滑动设置在滑轨上,所述滑轨远离滑块的一侧与动力板(14)的拐角处转动相连。
4.根据权利要求1所述的一种仿生机械虎,其特征在于:所述小腿(15)底部设有脚(16),所述脚(16)为板状,且顶部与小腿(15)底部转动相连。
5.根据权利要求1所述的一种仿生机械虎,其特征在于:所述支架(1)上方设有肋骨(4)。
6.根据权利要求1所述的一种仿生机械虎,其特征在于:所述机械虎本体上装有红外线探测装置,红外线探测装置与单片机输入端相连。
7.根据权利要求1所述的一种仿生机械虎,其特征在于:所述语音模块包括语音控制模块与语音播放模块,所述语音控制模块与单片机输入端相连,语音播放模块与单片机输出端相连。
技术总结
本技术公开了一种仿生机械虎,支架两端分别设有前横梁和后横梁,前腿组件、后腿组件结构相同,包括大腿和小腿,大腿顶部与其对应的前腿支架、后腿支架相连,底部与小腿相连,步进电机输出端设有传动机构,通过传动机构带动大腿、小腿动作;虎头组件与脖子相连,虎头上固定在脖子远离支架的一端,虎头上和虎下颚相互铰接,后推杆的伸缩端与脖子中部相互铰接,前推杆的伸缩端与虎下颚相互铰接;控制机构包括单片机、语音控制模块、蓝牙控制模块。本技术的仿生机械虎可以帮助青少年更好的了解动物,避免与真实动物接触造成误伤,并做到了操作简单,控制方便。使用者可独立操作也可通过语音控制或用手机蓝牙控制,操作更加智能化。
技术研发人员:邹永,刘业峰,张洪铭,马腾飞,于鲲,李典,陈立秋,杨海森,张丽魏,苏鑫
受保护的技术使用者:沈阳工学院
技术研发日:20220124
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!