一种水冷壁机器人用爬行装置的制作方法
1.本实用新型涉及永磁吸附爬壁机器人技术领域,具体为一种水冷壁机器人用爬行装置。
背景技术:
2.燃煤机组三大主设备中,锅炉引起的非计划停运台年占全部燃煤机组非计划停运总时间的约45%;而炉内四管事故主要是水冷壁事故。科学有效的水冷壁检测是保障燃煤机组安全运行的重要手段,现今通常的水冷壁检测方式是由作业人员来完成。但这种人工作业的方式存在以下几点缺陷:检测时间长。在进行检测前,需花费至少一周时间搭建和拆除作业平台,影响检测工作效率。劳动强度大。炉膛内部环境恶劣、粉尘严重,检测人员劳动强度和难度较大。存在作业安全风险。炉膛高达数十米,作业人员长时间的高空作业存在安全隐患。检测效率低。人工检测依赖人员专业水平,检测效率受到人员技能熟练度、体力因素等影响,如公告号为cn213168335u的实用新型专利中,公开了一种永磁吸附爬壁机器人,包括具有吸附力的底盘架,底盘架上设有密封箱、驱动轮组及扫查模块,密封箱内设有控制单元、驱动电机及钢丝电机,控制单元控制驱动电机及钢丝电机,驱动电机驱动具有吸附力的驱动轮组,驱动轮组吸附在水冷壁上并带动底盘架及其上的密封箱、扫查模块沿水冷壁移动,钢丝电机驱动扫查模块摆动,该实用新型提供了一种永磁吸附爬壁机器人来代替人工执行作业,通过磁吸附方式沿着水冷壁进行自动化检测,可以节省搭建和拆除作业平台时间,提高作业效率,机器人替人的检测方式降低了人员作业的劳动强度,并且保障了人员作业的安全性,减少外部因素对于检测效率的影响,从而解决现有方式的缺陷,然而,该装置在使用时,两轮间距无法调节,无法适应不同间距的水冷壁管道,因此,使用效果不佳。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了一种水冷壁机器人用爬行装置,解决了现有装置两轮间距无法调节,无法适应不同间距的水冷壁管道的技术问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种水冷壁机器人用爬行装置,包括底座,所述底座一侧壁面固接有设备箱,所述底座另一侧壁面固接有安装筒,所述安装筒内滑动连接有安装杆,所述安装杆底端安装有推动装置,所述安装杆铰接有两对连杆,所述底座侧壁面固接有两对安装套,两对所述安装套中的一对内滑动连接有一对连轴,两对所述安装套中的另一对内活动连接有一对转轴,一对所述转轴上转动连接有一对套筒,两对所述连杆中的一对与一对所述连轴相铰接,两对所述连杆中的另一对与一对所述套筒相铰接,一对所述转轴内开设有一对安装腔,一对所述安装腔内滑动连接有一对方杆,所述底座侧壁面且位于一对所述方杆之间固接有双轴电机,所述双轴电机驱动端与一对所述方杆相固接。
5.优选的,所述推动装置包括固接于所述底座侧壁面上的螺纹套,所述螺纹套内旋接有丝杆,所述丝杆顶端与所述安装杆转动连接,所述丝杆底端固接有手柄。
6.优选的,所述手柄外表面开设有防滑纹路。
7.优选的,一对所述连轴固接有一对后轮,一对所述转轴固接有一对前轮,一对所述后轮与一对所述前轮均固接有橡胶圈,所述橡胶圈圆周壁面内均固接有若干磁铁块。
8.优选的,一对所述转轴上且位于一对所述套筒两侧均固接有一对卡环。
9.优选的,所述设备箱上固接有照明灯。
10.优选的,所述设备箱上固接有摄像头。
11.有益效果
12.本实用新型提供了一种水冷壁机器人用爬行装置,具备以下有益效果:根据水冷壁管道的间距通过旋转手柄使丝杆旋转,可以使安装杆推动连杆移动,可以使转轴带动前轮、连轴带动后轮同时调节轮距配合水冷壁管道的间距,通过车轮上的橡胶圈圆周壁面内的磁铁块可以使机器人吸附在水冷壁管道上,通过双轴电机带动方杆旋转,可以使转轴带动前轮转动使机器人移动。
附图说明
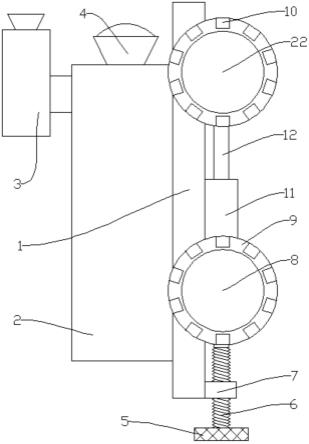
13.图1为本实用新型的正视图。
14.图2为本实用新型的侧视图。
15.图3为图2中a的放大示意图。
16.图中:1-底座;2-设备箱;3-摄像头;4-照明灯;5-手柄;6-丝杆;7-螺纹套;8-后轮;9-橡胶圈;10-磁铁块;11-安装筒;12-安装杆;13-连杆;14-安装套;15-连轴;16-双轴电机;17-转轴;18-安装腔;19-方杆;20-套筒;21-卡环;22-前轮。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.请参阅图1-3,本实用新型提供一种技术方案:一种水冷壁机器人用爬行装置,包括底座1,所述底座1一侧壁面固接有设备箱2,所述底座1另一侧壁面固接有安装筒11,所述安装筒11内滑动连接有安装杆12,所述安装杆12底端安装有推动装置,所述安装杆12铰接有两对连杆13,所述底座1侧壁面固接有两对安装套14,两对所述安装套14中的一对内滑动连接有一对连轴15,两对所述安装套14中的另一对内活动连接有一对转轴17,一对所述转轴17上转动连接有一对套筒20,两对所述连杆13中的一对与一对所述连轴15相铰接,两对所述连杆13中的另一对与一对所述套筒20相铰接,一对所述转轴17内开设有一对安装腔18,一对所述安装腔18内滑动连接有一对方杆19,所述底座1侧壁面且位于一对所述方杆19之间固接有双轴电机16,所述双轴电机16驱动端与一对所述方杆19相固接;所述推动装置包括固接于所述底座1侧壁面上的螺纹套7,所述螺纹套7内旋接有丝杆6,所述丝杆6顶端与所述安装杆12转动连接,所述丝杆6底端固接有手柄5;所述手柄5外表面开设有防滑纹路;一对所述连轴15固接有一对后轮8,一对所述转轴17固接有一对前轮22,一对所述后轮8与一对所述前轮22均固接有橡胶圈9,所述橡胶圈9圆周壁面内均固接有若干磁铁块10;一对
所述转轴17上且位于一对所述套筒20两侧均固接有一对卡环21;所述设备箱2上固接有照明灯4;所述设备箱2上固接有摄像头3。
19.通过本领域人员,将本案中所有电气件与其适配的电源通过导线进行连接,并且应该根据实际情况,选择合适的控制器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不在对电气控制做说明。
20.实施例:根据说明书附图1-3可知,将双轴电机16、摄像头3、照明灯4通过导线连通外接电源以及外接控制器,在使用时,根据水冷壁管道的间距通过旋转手柄5使丝杆6旋转,可以使安装杆12推动连杆13移动,可以使转轴17带动前轮22、连轴15带动后轮8同时调节轮距配合水冷壁管道的间距,通过车轮上的橡胶圈9圆周壁面内的磁铁块10可以使机器人吸附在水冷壁管道上,通过双轴电机16带动方杆19旋转,可以使转轴17带动前轮22转动使机器人移动。
技术特征:
1.一种水冷壁机器人用爬行装置,包括底座(1),其特征在于,所述底座(1)一侧壁面固接有设备箱(2),所述底座(1)另一侧壁面固接有安装筒(11),所述安装筒(11)内滑动连接有安装杆(12),所述安装杆(12)底端安装有推动装置,所述安装杆(12)铰接有两对连杆(13),所述底座(1)侧壁面固接有两对安装套(14),两对所述安装套(14)中的一对内滑动连接有一对连轴(15),两对所述安装套(14)中的另一对内活动连接有一对转轴(17),一对所述转轴(17)上转动连接有一对套筒(20),两对所述连杆(13)中的一对与一对所述连轴(15)相铰接,两对所述连杆(13)中的另一对与一对所述套筒(20)相铰接,一对所述转轴(17)内开设有一对安装腔(18),一对所述安装腔(18)内滑动连接有一对方杆(19),所述底座(1)侧壁面且位于一对所述方杆(19)之间固接有双轴电机(16),所述双轴电机(16)驱动端与一对所述方杆(19)相固接。2.根据权利要求1所述的一种水冷壁机器人用爬行装置,其特征在于,所述推动装置包括固接于所述底座(1)侧壁面上的螺纹套(7),所述螺纹套(7)内旋接有丝杆(6),所述丝杆(6)顶端与所述安装杆(12)转动连接,所述丝杆(6)底端固接有手柄(5)。3.根据权利要求2所述的一种水冷壁机器人用爬行装置,其特征在于,所述手柄(5)外表面开设有防滑纹路。4.根据权利要求1所述的一种水冷壁机器人用爬行装置,其特征在于,一对所述连轴(15)固接有一对后轮(8),一对所述转轴(17)固接有一对前轮(22),一对所述后轮(8)与一对所述前轮(22)均固接有橡胶圈(9),所述橡胶圈(9)圆周壁面内均固接有若干磁铁块(10)。5.根据权利要求1所述的一种水冷壁机器人用爬行装置,其特征在于,一对所述转轴(17)上且位于一对所述套筒(20)两侧均固接有一对卡环(21)。6.根据权利要求1所述的一种水冷壁机器人用爬行装置,其特征在于,所述设备箱(2)上固接有照明灯(4)。7.根据权利要求1所述的一种水冷壁机器人用爬行装置,其特征在于,所述设备箱(2)上固接有摄像头(3)。
技术总结
本实用新型公开了一种水冷壁机器人用爬行装置,涉及永磁吸附爬壁机器人技术领域,包括底座,所述底座一侧壁面固接有设备箱,所述底座另一侧壁面固接有安装筒,所述安装筒内滑动连接有安装杆,所述安装杆铰接有两对连杆,所述底座侧壁面固接有两对安装套,两对所述安装套中的一对内滑动连接有一对连轴,两对所述安装套中的另一对内活动连接有一对转轴,一对所述转轴上转动连接有一对套筒,两对所述连杆中的一对与一对所述连轴相铰接,两对所述连杆中的另一对与一对所述套筒相铰接,本装置通过安装杆推动连杆移动,使转轴带动前轮、连轴带动后轮同时调节轮距配合水冷壁管道的间距。动后轮同时调节轮距配合水冷壁管道的间距。动后轮同时调节轮距配合水冷壁管道的间距。
技术研发人员:金一 金树仁
受保护的技术使用者:博克力节能环保设备(大连)有限公司
技术研发日:2022.01.25
技术公布日:2022/7/12
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1