助力转向器及车辆的制作方法
1.本实用新型涉及汽车技术领域,特别涉及一种助力转向器及车辆。
背景技术:
2.随着智能驾驶技术的迅速发展,智能驾驶等级迅速提升,使得完全冗余电机成为实现高等级智能驾驶的必要条件。
3.相关技术中,可以使用一种双绕组、双控制器、双通讯和双电源策略的方案,该方案中双绕组处于一个空间内,控制器之间相互通讯;还可以使用一种双电机并联方案。
4.但是,前者方案在出现由于环境导致的失效时,两个绕组会同时失效,不能起到冗余功效,且控制器结构复杂,方案成熟度较低;后者方案需要增加额外的蜗杆,成本较高,且横向空间占用大,布置困难。
技术实现要素:
5.有鉴于此,本实用新型旨在提出一种助力转向器及车辆,该方法可以通过联轴器串联纵向布置双电机,同时采用两个各自独立的电机控制器,使得对电机的控制简单,降低成本,减少对空间的占用,避免环境影响导致的失效可能,实现电机冗余,提升安全性和功能性,满足实际需求。
6.为达到上述目的,本实用新型的技术方案是这样实现的:
7.一种助力转向器,包括:设置在同一蜗杆上的多个助力电机;与方向盘相连的采集组件,所述采集组件采集所述方向盘的实际转矩;与所述多个助力电机和所述采集组件相连的控制组件,所述控制组件基于由所述实际转矩得到的目标扭矩控制所述多个助力电机同时工作,并在任一助力电机故障时,控制故障的助力电机停止工作的同时,控制其他助力电机输出扭矩增大至所述目标扭矩。
8.进一步地,所述多个助力电机包括第一助力电机和第二助力电机。
9.进一步地,所述控制组件包括:第一电机控制器和第二电机控制器,其中,所述第一电机控制器与所述第一助力电机相连,所述第二电机控制器与所述第二助力电机相连。
10.进一步地,还包括:连接所述第一助力电机和所述第二助力电机的连接组件。
11.进一步地,所述连接组件包括:联轴器和联轴器弹性体,其中,所述联轴器的一端与所述第一助力电机的输出端相连,所述联轴器的另一端上设置有所述联轴器弹性体,并通过所述联轴器弹性体与所述第二助力电机的输入端相连。
12.进一步地,还包括:设置于所述连接组件外面的连接护套,以密封所述连接组件。
13.进一步地,还包括:设置于所述第一助力电机的壳体和所述第二助力电机的壳体之间的至少一个连接螺栓,固定所述第一助力电机和所述第二助力电机。
14.进一步地,还包括:设置于所述至少一个连接螺栓外面的至少一个套管。
15.进一步地,所述采集组件包括扭矩传感器。
16.相对于现有技术,本实用新型所述的助力转向器具有以下优势:
17.本实用新型所述的助力转向器可以通过联轴器串联纵向布置双电机,同时采用两个各自独立的电机控制器,使得对电机的控制简单,降低成本,减少对空间的占用,避免环境影响导致的失效可能,实现电机冗余,提升安全性和功能性,满足实际需求。
18.本实用新型的另一个目的在于提出一种车辆,该车辆可以通过联轴器串联纵向布置双电机,同时采用两个各自独立的电机控制器,使得对电机的控制简单,降低成本,减少对空间的占用,避免环境影响导致的失效可能,实现电机冗余,提升安全性和功能性,满足实际需求。
19.为达到上述目的,本实用新型的技术方案是这样实现的:
20.一种车辆,设置有如上述实施例所述的助力转向器。
21.所述的车辆与上述的助力转向器相对于现有技术所具有的优势相同,在此不再赘述。
附图说明
22.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
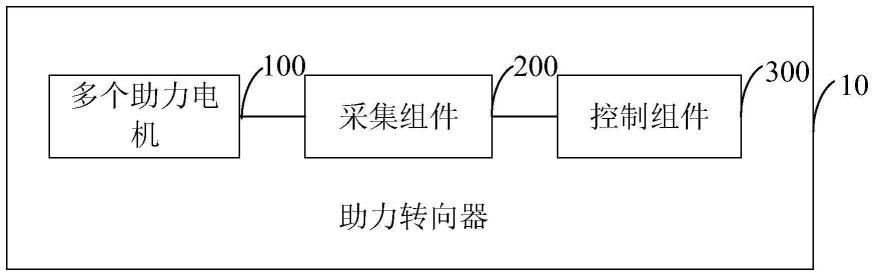
23.图1为根据本实用新型提供的一种助力转向器的结构示意图;
24.图2为根据本实用新型的电机连接机构图;
25.图3为根据本实用新型的助力转向器正常工作时的工作原理图;
26.图4为根据本实用新型的循环球式电控液压助力转向器;
27.图5为根据本实用新型的助力转向器出现异常时的工作原理图;
28.图6为根据本实用新型的助力转向器扭矩电流变化示意图;
29.图7为根据本实用新型的车辆智能驾驶状态转向助力器正常工作的原理图;
30.图8为根据本实用新型的车辆智能驾驶出现异常时转向助力器的工作原理图。
具体实施方式
31.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
32.下面将参考附图并结合实施例来详细说明本实用新型。
33.具体而言,图1为本实用新型所提供的一种助力转向器的结构示意图。
34.如图1所示,该助力转向器10包括:多个助力电机100、采集组件200和控制组件300。
35.其中,多个助力电机100设置在同一蜗杆上;采集组件200与方向盘相连,用于采集方向盘的实际转矩;控制组件300与多个助力电机100和采集组件200相连,基于由实际转矩得到的目标扭矩控制多个助力电机100同时工作,并在任一助力电机故障时,控制故障的助力电机停止工作的同时,控制其他助力电机输出扭矩增大至目标扭矩。
36.可以理解的是,本实用新型可以在ehps(electronic hydrostatic power steering,循环球式电控液压助力转向器)或eps(electric power steering,电动助力转向系统)的基础上串联一个电机,以下实施例中,本实用新型将以ephs转向器为例进行具体
阐述。其中,ephs 结构主要包括两部分:智能模块分总成和液压循环球转向器分总成。
37.在本实用新型中,采集组件200可以包括扭矩传感器。
38.在本实用新型中,如图2所示,多个助力电机100包括第一助力电机110和第二助力电机120。
39.可以理解的是,本实用新型的智能模块分总成包含第一助力电机110和第二助力电机 120两个电机,如图2所示,第一和第二助力电机分别是独立的电机个体,因此两个电机均能满足不低于ip67的防护要求,以规避由环境因素导致的共因失效。其中,ip67的防护要求是指防护灰尘吸入(整体防止接触,防护灰尘渗透)、防护短暂浸泡(防浸)。
40.在本实用新型中,如图3所示,控制组件300包括:第一电机控制器310和第二电机控制器320。其中,第一电机控制器310与第一助力电机110相连,第二电机控制器320与第二助力电机120相连。
41.可以理解的是,本实用新型对双电机采用两个各自独立的电机控制器进行控制,使得对电机的控制简单,避免环境影响导致的失效可能,实现电机冗余,提升安全性和功能性,满足实际需求。
42.具体而言,本实用新型的第一和第二助力电机分别与整车网络连接,本实用新型的第一和第二助力电机可以接收整车报文,并外发自身报文;电机控制器之间通过整车网络通讯,仅互相监测工作状态,可以减少接口及信号交互,降低控制复杂度。
43.在本实用新型中,助力转向器10还包括:连接组件400。其中,连接组件连接第一助力电机和第二助力电机。
44.在本实用新型中,连接组件400包括:联轴器410和联轴器弹性体420,其中,联轴器的一端与第一助力电机的输出端相连,联轴器的另一端上设置有联轴器弹性体,并通过联轴器弹性体与第二助力电机的输入端相连。
45.在本实用新型中,助力转向器10还包括:设置于连接组件外面的连接护套500,以密封连接组件。
46.可以理解的是,如图4所示,本实用新型的第一和第二助力电机之间可以通过联轴器及联轴器弹性体连接,联轴器外面增加连接护套,可以起到防尘、防水密封的作用。
47.在本实用新型中,助力转向器10还包括:设置于第一助力电机的壳体和第二助力电机的壳体之间的至少一个连接螺栓,固定第一助力电机和第二助力电机。
48.在本实用新型中,助力转向器10还包括:设置于至少一个连接螺栓外面的至少一个套管600。
49.可以理解的是,如图4所示,本实用新型的连接螺栓增加套管,可以加大接触面积,增加摩擦力;同时本实用新型可以约束压紧后尺寸,防止连接护套被过度压缩,产生损伤。
50.下面将以不同工作状态的应用场景对本实用新型的助力转向器进行阐述,具体如下:
51.(1)在辅助驾驶状态工作时,如图3所示,本实用新型的第一助力电机、第二助力电机和液压系统同时工作。其中,液压系统提供主要助力,电机改善驾驶员手感,此时电机仅提供很小的助力扭矩,单电机工作就能满足助力需求。
52.由于第一助力电机和第二助力电机规格相同,当其中一个电机失效时,如图5所示,此时另一个电机仍可完全满足力矩输出要求,起到冗余的功效。因此本实用新型可以提
高相关功能安全等级,满足高级的智能驾驶需求。
53.(2)当驾驶员转向时,其工作电机扭矩和电流变化可以如图6所示,此时每个电机输出需求力矩的占比可以参考图6、根据实际情况进行具体设置,对此不做具体限定;在本实用新型中,由于所选用的电机规格相同,使得两个电机共同工作时,单个电机的扭矩输出可以小于总扭矩的50%,因此本实用新型可以设置每个电机输出需求力矩的50%,为方便叙述,以下实施例中,将以单个电机的输出需求力矩的50%进行阐述。
54.可以理解的是,基于上述单个电机输出需求力矩的占比设置,使得本实用新型的一个电机失效时,剩余的正常工作电机仍然能够满足输出需求。具体地,本实用新型可以在其中一个电机产生故障时,向整车控制器发送故障报警,警示驾驶员,同时增加另一个完好电机的输出力矩,可以按照两倍的工作电流输出,直至该电机输出最大工作电流,以弥补电机故障导致的力矩缺失。
55.举例而言,正常工作时,如图3所示,标定单个电机输出所需总力矩的50%,由于两个电机共同输出,相较于单电机时,线束的电路会变小一半,压降会变小,同时发热量也会变小,电机不容易进入过热状态;
56.故障工作时,以第一助力电机故障为例,如图5所示,第一助力电机产生故障时,电机停止工作,将故障信息发到整车can网络(controller area network,控制器局域网络),通过仪表显示报警信息,警示驾驶员。第二助力电机检测到第一助力电机故障后,将现有工作电流加倍,不超过最大工作电流,以弥补一个电机损坏导致的输出力矩缺失。
57.(3)高级智能驾驶状态工作时,如图7所示,智能驾驶控制器可通过整车网络监测电机的执行情况。正常工作状态下,第一助力电机和第二助力电机可以按照整车指令要求动作:如果是转角指令,均按照转角指令执行;如果是扭矩指令,则各输出扭矩的50%,传感器监测角度信号,电机控制器内部监测力矩信号,将两个信号和电机工作状态一并发送到整车网络。
58.故障工作状态下,如图8所示,当其中一个电机产生故障时,比如,以第一助力电机故障为例,此时第一助力电机停止输出,将工作状态发送到整车网络,在仪表显示,警示驾驶员。第二助力电机监测到第一助力电机故障信号后,如果是扭矩控制,第二助力电机会承担指令里的所有扭矩输出,以弥补第一助力电机带来的扭矩缺失;如果是转角指令,第二助力电机会继续按照转角指令执行,以保证智能驾驶功能的正常工作,从而满足功能安全要求。
59.根据本实用新型提出的助力转向器,可以通过联轴器串联纵向布置双电机,同时采用两个各自独立的电机控制器,使得对电机的控制简单,降低成本,减少对空间的占用,避免环境影响导致的失效可能,实现电机冗余,提升安全性和功能性,满足实际需求。
60.本实用新型还提供一种车辆,包括如上述实施例的助力转向器。
61.需要说明的是,前述对助力转向器实施例的解释说明也适用于该实施例的车辆,此处不再赘述。
62.根据本实用新型提出的车辆,可以通过联轴器串联纵向布置双电机,同时采用两个各自独立的电机控制器,使得对电机的控制简单,降低成本,减少对空间的占用,避免环境影响导致的失效可能,实现电机冗余,提升安全性和功能性,满足实际需求。
63.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本
实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1