一种智能四足机械狗
1.本实用新型涉及四足机械狗领域,具体是指一种智能四足机械狗。
背景技术:
2.对于火灾、地震等自然灾害造成的危险废墟环境的探测,或高山、洞穴等极端环境的探测,往往可以通过四足机器人来代替人类对其进行探测,完成所需任务。目前,现有的四足机器人,如申请号为202121711923.x,名称为一种废墟场景小型救援侦察四足机器人的专利申请,其机身的主体与上层板之间通过数个尼龙柱进行支撑,导致其机身整体结构受到外力冲击时容易解体,从而无法执行相应任务,且现有的四足机器人机身的结构之间普遍通过螺栓连接等方式进行固定,机身的结构之间的连接强度弱,机身整体不够稳固,在危险或极端环境下,受外力冲击时容易破损散架,降低了其整体的使用寿命。
3.针对上述现有技术存在的问题设计一种智能四足机械狗是本实用新型研究的目的。
技术实现要素:
4.针对上述现有技术存在的问题,本实用新型提供一种智能四足机械狗,能够有效解决上述现有技术存在的问题。
5.本实用新型的技术方案是:
6.一种智能四足机械狗,包括:
7.机身主体,包括底板、前护板、后护板,所述前护板的左右两端和后护板的左右两端分别设有连接部,所述底板、前护板、后护板围挡形成相应的容纳槽;
8.两个电池固定盖,容纳设置于所述容纳槽内,两个所述电池固定盖的一端分别与所述前护板和后护板卯榫设置,另一端相向延伸并抵接形成凹字形的卡接槽;
9.机身上盖,罩设于所述底板的上方,所述机身上盖的下端面设有与所述卡接槽相适配的卡接部,所述机身上盖与两个所述电池固定盖通过所述卡接部与所述卡接槽的配合卯榫设置,所述机身上盖的左右内侧壁上分别开设有卯槽;
10.机身下盖,罩设于所述底板的下方,所述机身下盖包括前下盖和后下盖,所述前下盖和后下盖的左右外侧壁上分别设有与所述卯槽相适配的榫楞,所述前下盖和后下盖分别通过所述卯槽与榫楞的配合与所述机身上盖卯榫设置;
11.四个腿部系统,四个腿部系统的上端分别与所述连接部活动设置;
12.传感组件,所述传感组件分别设于所述机身主体和/或所述腿部系统上;
13.控制系统,所述控制系统分别与所述传感组件和四个所述腿部系统通信连接。
14.进一步地,每一所述腿部系统均包括关节舵机组件、大腿结构件和小腿结构件,所述关节舵机组件包括第一舵机、第二舵机、第三舵机,所述第一舵机与第二舵机固定设置,所述第一舵机的旋转输出端与所述连接部转动设置,所述第二舵机的旋转输出端与所述大腿结构件的一端转动设置,所述第三舵机固设于所述大腿结构件远离所述第二舵机的一端
的内部,且所述第三舵机的旋转输出端与所述小腿结构件的上端转动设置。
15.进一步地,每一所述腿部系统还包括第一固定框和第二固定框,所述第一舵机和第二舵机相抵靠设置且中心设于同一轴线上,所述第一固定框套设于所述第一舵机与和第二舵机的外壁上,所述第二固定框垂直于所述第一固定框并套设于所述第一固定框、第一舵机和第二舵机的外壁上,所述第一固定框与所述第二固定框之间卯榫设置。
16.进一步地,所述小腿结构件的下端设为弧形足部,所述弧形足部从上到下逐渐收窄,所述弧形足部的底面设为平行于水平面的防滑面。
17.进一步地,所述传感组件包括超声波传感装置,所述前护板远离所述机身本体的一侧设有固定部,所述固定部内设有头部舵机,所述头部舵机的旋转输出端朝上且与所述超声波传感装置的底部转动设置,所述控制系统包括控制模块,所述控制模块分别与所述超声波传感装置、关节舵机组件、头部舵机通信连接。
18.进一步地,所述传感组件还包括红外传感装置,所述红外传感装置设于靠近所述机身主体前侧的所述腿部系统上,所述红外传感装置与所述控制模块通信连接。
19.进一步地,所述传感组件还包括语音识别装置,所述语音识别装置设于所述后护板远离所述机身主体的一侧,所述语音识别装置与所述控制模块通信连接。
20.进一步地,所述控制系统还包括无线通讯模块,所述控制模块通过所述无线通讯模块与遥控装置和/或云端通信连接。
21.进一步地,所述传感组件还包括摄像装置和烟雾传感装置,所述摄像装置设于所述前护板远离所述机身主体的一侧,所述烟雾传感装置设于所述后护板远离所述机身主体的一侧,所述摄像装置和烟雾传感装置分别通过所述无线通讯模块与所述云端通信连接。
22.进一步地,所述机身主体一体成型,或者,所述机身主体分体设置为四个拼接块,四个所述拼接块相互靠近的一侧均设有相互适配的凹凸部,四个所述拼接块之间通过所述凹凸部相互可拆卸设置。
23.因此,本实用新型提供以下的效果和/或优点:
24.本实用新型提供的一种智能四足机械狗,包括机身主体、两个电池固定盖、机身上盖、机身下盖、四个腿部系统、传感组件以及控制系统,两个电池固定盖与机身主体卯榫设置,机身上盖与两个电池固定盖之间通过卡接部与卡接槽的配合卯榫设置,机身下盖与机身上盖之间通过卯槽与榫楞的配合卯榫设置。通过将机身结构之间的连接结构设置为卯榫结构,可以加强智能四足机械狗机身的结构之间的连接强度,提高机身整体的稳固性,避免在危险或极端环境下,机身受外力冲击破损散架,延长了智能四足机械狗整体的使用寿命。
25.本实用新型提供的一种智能四足机械狗,机身主体、两个电池固定盖、机身上盖、机身下盖之间通过卯榫设置进行连接,其机身主体、大腿结构件与小腿结构件之间分别通过关节舵机组件进行连接,通过第一固定框与第二固定框卯榫设置固定第一舵机与第二舵机,且机身主体可分体设置为四个拼接块,四个拼接块之间通过凹凸部相互可拆卸设置。通过上述结构之间的配合,便于对智能四足机械狗整体进行组装和拆卸,且便于对智能四足机械狗进行运输和存储。
26.应当明白,本实用新型的上文的概述和下面的详细说明是示例性和解释性的,并且意在提供对如要求保护的本实用新型的进一步的解释。
附图说明
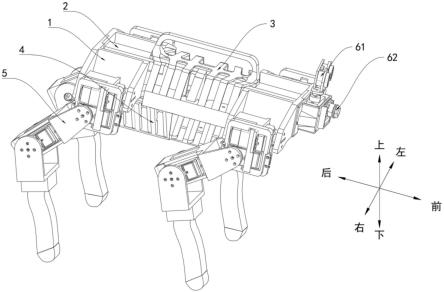
27.图1为本实用新型提供的一种智能四足机械狗的立体结构示意图。
28.图2为本实用新型提供的机身上盖、电池固定盖、机身主体、机身下盖的爆炸结构示意图。
29.图3为本实用新型提供的机身上盖、电池固定盖的爆炸结构示意图,图中虚线箭头表示机身上盖安装方向。
30.图4为本实用新型提供的腿部系统的立体结构示意图。
31.图5为本实用新型提供的机身主体的爆炸结构示意图。
32.图6为本实用新型提供的一种智能四足机械狗的模块连接示意图。
具体实施方式
33.为了便于本领域技术人员理解,现将实施例结合附图对本实用新型的结构作进一步详细描述:
34.参考图1-6,一种智能四足机械狗,包括:
35.机身主体1,包括底板11、前护板12、后护板13,所述前护板12的左右两端和后护板13的左右两端分别设有连接部14,所述底板11、前护板12、后护板13围挡形成相应的容纳槽16;
36.两个电池固定盖2,容纳设置于所述容纳槽16内,两个所述电池固定盖2的一端分别与所述前护板12和后护板13卯榫设置,另一端相向延伸并抵接形成凹字形的卡接槽21;本实施例中,所述前护板12和后护板13 上分别开设有若干卯孔,两个所述电池固定盖2的一端上分别设有若干榫头,两个所述电池固定盖2分别通过若干所述榫头与若干所述卯孔之间的配合卯榫连接,在其他实施例中,两个所述电池固定盖2可通过其他现有的卯榫连接方式分别与所述前护板12和后护板13卯榫设置。
37.机身上盖3,罩设于所述底板11的上方,所述机身上盖3的下端面设有与所述卡接槽21相适配的卡接部31,所述机身上盖3与两个所述电池固定盖2通过所述卡接部31与所述卡接槽21的配合卯榫设置,在其他实施例中,所述机身上盖3与两个所述电池固定盖2之间也可以通过其他卯榫连接方式进行卯榫设置,所述机身上盖3的左右内侧壁上分别开设有卯槽 32;本实施例中,所述机身上盖3的顶部还设有环形握把,智能四足机械狗安装完成后,所述环形握把可方便用户对智能四足机械狗进行整体移动。
38.机身下盖4,罩设于所述底板11的下方,所述机身下盖4包括前下盖 41和后下盖42,本实施例中,所述前下盖41和后下盖42的左右外侧壁上分别设有与所述卯槽32相适配的榫楞43,所述前下盖41和后下盖42分别通过所述卯槽32与榫楞43的配合与所述机身上盖3卯榫设置,以使所述机身上盖3的下端面与所述底板11的顶面相抵接,所述前下盖41和后下盖42的顶面均与所述底板11的底面相抵接,从而将所述机身下盖4、机身上盖3、两个所述电池固定盖2与所述机身主体1稳固连接,提高机身整体结构的稳定性,在其他实施例中,所述机身上盖3和所述机身下盖4之间也可以通过其他卯榫连接的方式卯榫设置;
39.四个腿部系统5,四个腿部系统5的上端分别与所述连接部14活动设置;本实施例中,所述机身主体1、电池固定盖2、机身上盖3、机身下盖 4以及腿部系统5均采用pla高分子材料通过3d打印技术制成,从而使智能四足机械狗整体更加轻盈;
40.传感组件6,所述传感组件6分别设于所述机身主体1和/或所述腿部系统5上;
41.控制系统,所述控制系统分别与所述传感组件6和四个所述腿部系统5 通信连接。
42.上述结构中,所述两个电池固定盖2与机身主体1之间卯榫设置,机身上盖3与两个电池固定盖2之间通过卡接部31与卡接槽21的配合卯榫设置,机身下盖4与机身上盖3之间通过卯槽32与榫楞43的配合卯榫设置。通过将机身结构之间的连接结构设置为卯榫结构,使所述机身主体1、两个电池固定盖2、机身上盖3、机身下盖4之间相互稳固连接,可以加强智能四足机械狗机身的结构之间的连接强度,提高机身整体的稳固性,避免在危险或极端环境下,机身受外力冲击破损散架,延长了智能四足机械狗整体的使用寿命,同时,便于对智能四足机械狗进行组装和拆卸。
43.为了可以灵活控制腿部系统5的运动,每一所述腿部系统5均包括关节舵机组件51、大腿结构件52和小腿结构件53,所述关节舵机组件51包括第一舵机511、第二舵机512、第三舵机513,所述第一舵机511与第二舵机512固定设置,所述第一舵机511的旋转输出端与所述连接部14转动设置,从而通过所述第一舵机511控制腿部系统5进行左右运动,所述第二舵机512的旋转输出端与所述大腿结构件52的一端转动设置,从而通过所述第二舵机512控制腿部系统5进行前后运动,所述第三舵机513固设于所述大腿结构件52远离所述第二舵机512的一端的内部,且所述第三舵机513的旋转输出端与所述小腿结构件53的上端转动设置,从而通过所述第三舵机513控制所述小腿结构件53前后运动以及腿部系统5的伸缩运动。通过上述关节舵机组件51、大腿结构件52和小腿结构件53之间的配合可以控制智能四足机械狗完成前后移动、转弯、蹲俯等动作,同时,上述结构便于对腿部系统进行组装和拆卸。
44.为了加强所述第一舵机511和第二舵机512之间的固定强度和稳定性,每一所述腿部系统5还包括第一固定框54和第二固定框55,所述第一舵机 511和第二舵机512相抵靠设置且中心设于同一轴线上,所述第一固定框 54套设于所述第一舵机511与和第二舵机512的外壁上,所述第二固定框 55垂直于所述第一固定框54并套设于所述第一固定框54、第一舵机511 和第二舵机512的外壁上,所述第一固定框54与所述第二固定框55之间卯榫设置,本实施例中,所述第二固定框55的内壁上开设有与所述第一固定框54相适配的套接槽,所述第一固定框54与所述第二固定框55通过所述套接槽相互垂直并卯榫设置,在其他实施例中,所述第一固定框54与所述第二固定框55可通过其他卯榫连接方式卯榫设置。从而将现有的舵机之间普遍直接通过螺丝连接等点对点的方式进行固定,替换成将第一舵机511 和第二舵机512固定于所述第一固定框54和第二固定框55围合形成的固定区内,将点对点的固定方式替换成面对面的固定方式,减小第一舵机511 和第二舵机512之间的固定连接结构,在腿部系统5频繁运动过程中,对其造成的损耗,延长了第一舵机511和第二舵机512的使用寿命。
45.为了减小所述小腿结构件53与地面的摩擦力,所述小腿结构件53的下端设为弧形足部531,所述弧形足部531从上到下逐渐收窄,所述弧形足部531的底面设为平行于水平面的防滑面532。避免了智能四足机械狗在运动过程中因为摩擦力太大而走不动,同时防滑面532的设置也避免了智能四足机械狗在运动过程中打滑,从而造成不必要的损伤。
46.为了使智能四足机械狗在不同环境下可以自动行走避障,智能四足机械狗设有自动避障模式,具体地,所述传感组件6包括超声波传感装置61,所述前护板12远离所述机身
本体的一侧设有固定部121,所述固定部121 内设有头部舵机122,所述头部舵机122的旋转输出端朝上且与所述超声波传感装置61的底部转动设置,从而带动所述超声波传感装置61检测机身与其前方、左方和右方的障碍物之间的间距,所述控制系统包括控制模块,所述控制模块分别与所述超声波传感装置61、关节舵机组件51、头部舵机 122通信连接。当超声波传感装置61检测到机身与障碍物之间的间距小于 30cm时,所述控制模块控制所述关节舵机组件51执行避障动作,从而使智能四足机械狗完成对应动作。
47.为了使智能四足机械狗可以检测路面缺陷从而保护自身,所述自动避障模式还包括路面缺陷检测模块,具体地,所述传感组件6还包括红外传感装置,所述红外传感装置设于靠近所述机身主体1前侧的所述腿部系统5 上,所述红外传感装置与所述控制模块通信连接。当所述红外传感装置检测到前方路面存在缺陷时,所述控制模块控制所述关节舵机组件51停止运动,从而在遇到悬崖等场景时,智能四足机械狗可以及时停止运动,避免造成不必要的损失。
48.为了方便用户控制智能四足机械狗的运动,还设有语音控制模式,具体地,所述传感组件6还包括语音识别装置,所述语音识别装置设于所述后护板13远离所述机身主体1的一侧,所述语音识别装置与所述控制模块通信连接。当所述语音识别装置采集到特定的语音指令时,所述控制模块控制所述关节舵机组件51执行相应动作,从而使智能四足机械狗完成对应动作。本实施例中,所述语音识别装置为mr-ld3320语音识别模块,在其他实施例中,所述语音识别装置可为其他类型的语音识别装置。
49.为了方便用户控制智能四足机械狗的运动,还设有遥控模式和远程控制模式,具体地,所述控制系统还包括无线通讯模块,所述控制模块通过所述无线通讯模块与遥控装置和/或云端通信连接。当所述无线通讯模块接收到遥控装置或云端输入的控制指令时,将所述控制指令发送至所述控制模块,所述控制模块根据所述控制指令控制所述关节舵机组件51进行对应运动,从而使智能四足机械狗完成对应动作。
50.为了使智能四足机械狗可以更好的完成探测任务,所述传感组件6还包括摄像装置62和烟雾传感装置,所述摄像装置62设于所述前护板12远离所述机身主体1的一侧,所述烟雾传感装置设于所述后护板13远离所述机身主体1的一侧,所述摄像装置62和烟雾传感装置分别通过所述无线通讯模块与所述云端通信连接。所述摄像装置62通过所述无线通讯模块将其实时拍摄的图像信息传输至云端,用户可通过云端实时监控智能四足机械狗所探测的环境;所述烟雾传感器用于识别智能四足机械狗所处环境中的气体,并通过所述无线通讯模块将识别结果传输至云端,若检测到有毒气体,则向云端传输报警信息。本实施例中,所述烟雾传感装置为mq-135气体传感器,在其他实施例中,所述烟雾传感装置也可以为其他类型的气体传感器。
51.本实施例中,所述机身主体1一体成型,从而提高机身主体1的稳固性,在其他实施例中,为了方便运输和存储机械狗,且方便更换零件,同时确保机身主体1具有一定的稳固性,所述机身主体1分体设置为四个拼接块15,四个所述拼接块15相互靠近的一侧均设有相互适配的凹凸部151,四个所述拼接块15之间通过所述凹凸部151相互可拆卸设置,具体地,所述凹凸部151上开设有若干螺纹孔,相邻的所述凹凸部151拼合以后分别通过若干所述螺纹孔螺栓固定。
52.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于
本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1