一种接触长度可调的磁吸式机器人底盘
1.本实用新型涉及一种机器人底盘,尤其适用于一种爬壁机器人领域使用的履带接触长度可调的磁吸式机器人底盘。
背景技术:
2.在特种机器人领域,磁吸式履带机器人通过磁吸式履带可吸附于铁、钴和镍等金属表面,在底盘上附加摄像头、机械手、传感器等,可实现船舶、桁架、工程机械的探伤、除锈、喷涂等多种特种作业场景。但由于金属壁面材料不同、厚度不同,磁吸力度不同,吸附力过大将导致机器人功耗过大、移动笨拙、转向不灵活,吸附力过小将导致机器人从金属壁面脱落,因此保证稳定的吸附力是爬壁式机器人要解决的重要问题。现有的永磁式爬壁机器人,其驱动履带的长度不可调,吸附力恒定难以调节,只能针对专门的壁面吸附爬行,适应性强,为防止机器人从金属壁面脱落,只能在设计时增加安全余量,导致功耗过大、移动笨拙、转向不灵活。
技术实现要素:
3.技术问题:针对现有技术的不足之处,提供一种履带接触长度可调的磁吸式机器人底盘,金属壁面与履带接触长度越长,则吸附力越大。工作之前,根据实际吸附力大小,控制金属壁面与履带的接触长度,进而将吸附力调整到合适的大小。
4.技术方案:为实现上述技术目的,本实用新型的一种接触长度可调的磁吸式机器人底盘,包括机器人主体,机器人主体两侧分别设有用以与金属壁面接触的磁吸式履带行走机构,所述的磁吸式履带行走机构其底部履带长度可调,所述的磁吸式履带行走机构包括三个呈三角分布的动轮,三个动轮之间设有磁吸式履带,其中三个动轮包括一个驱动轮以及两个分别能够伸缩,且伸缩状态相反从而保证磁吸式履带始终保持张紧的辅助轮;两个辅助轮包括与驱动轮尺寸相同且水平设置且能够水平移动位置的可滑移从动轮,以及设置在驱动轮和可滑移从动轮之间且能够上下移动的调整轮。
5.所述可滑移从动轮连接有水平设置的从动轮推杆,从动轮推杆内设有伸缩机构,从动轮推杆一端与机器人主体连接固定,另一端通过叉臂与从动轮推杆活动连接;调整轮连接有内部设有伸缩结构的调整轮推杆,调整轮推杆在调整轮下方垂直设置,调整轮推杆上方通过叉臂与调整轮活动连接,下方与机器人主体连接固定。
6.调整轮推杆上设有用以实时获得压力数值的压力传感器。
7.驱动轮和可滑移从动轮的外侧设有保护用的外护板,其中可滑移从动轮的转轴处设有支撑其转轴的长槽。
8.保证磁吸式履带始终保持张紧的可滑移从动轮和调整轮,通过伸缩联动的从动轮推杆和调整轮推杆实现,当从动轮推杆伸长则调整轮推杆匹配缩短,反之从动轮推杆缩短则调整轮推杆匹配伸长。
9.当需要增大履带与金属壁面接触长度时,从动轮推杆伸长,推动可滑移从动轮沿
着外护板和箱体上的滑移槽移动,此时作用于调整轮上的压力增大,压力传感器感知到压力增大后,控制调整轮推杆使其缩短,从而使履带保持稳定的张紧状态;反之,当需要减小履带与金属壁面接触长度时,从动轮推杆缩短,调整轮上压力减小,调整轮推杆伸长。
10.一种接触长度可调的磁吸式机器人底盘的磁吸式履带调整系统,包括磁吸式履带行走机构底面履带长度调整单元和动力单元,其中:
11.吸式履带行走机构底面履带长度调整单元包括可滑移从动轮位移调整单元、调整轮位置调整单元和压力检测单元,
12.从动轮位移调整单元,用以控制从动轮推杆伸缩,从而改变可滑移从动轮与驱动轮之间的距离从而改变吸式履带行走机构底面履带的长度;
13.调整轮位置调整单元,用以控制调整轮推杆伸缩,从而改变调整轮的高度,从而保证磁吸式履带张紧;
14.压力检测单元,用以根据压力传感器检测到磁吸式履带给予调整轮的压力数据,从而判断出从动轮推杆当前的伸缩状况,从而帮助调整轮推杆快速做出匹配的伸缩调整。
15.有益效果:本装置连接的磁吸式履带能够根据需要调节行走履带的底面长度,适应性好,根据实际吸附力大小,控制金属壁面与履带的接触长度,进而将吸附力调整到合适的大小,调节快速,使用性好,具有广泛的实用性。
附图说明
16.图1是本实用新型履带接触长度可调的磁吸式机器人底盘结构示意图;
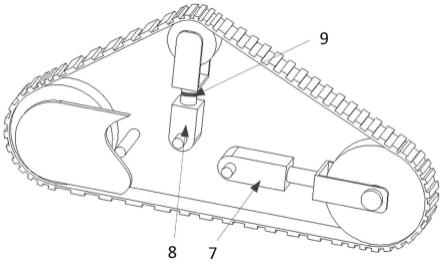
17.图2是本实用新型的磁吸式履带行走机构结构示意图。
18.图中:1-机器人主体;2-驱动轮;3-可滑移从动轮;4-调整轮;5-外护板;6-磁吸式履带;7-主动轮推杆;8-调整轮推杆;9-压力传感器
具体实施方式
19.下面结合附图对本实用新型作更进一步的说明。
20.如图1和图2所示,一种接触长度可调的磁吸式机器人底盘,包括机器人主体1,机器人主体1两侧分别设有用以与金属壁面接触的磁吸式履带行走机构,所述的磁吸式履带行走机构其底部履带长度可调,所述的磁吸式履带行走机构包括三个呈三角分布的动轮,三个动轮之间设有磁吸式履带6,其中三个动轮包括一个驱动轮2以及两个分别能够伸缩,且伸缩状态相反从而保证磁吸式履带6始终保持张紧的辅助轮;两个辅助轮包括与驱动轮2尺寸相同且水平设置且能够水平移动位置的可滑移从动轮3,以及设置在驱动轮2和可滑移从动轮3之间且能够上下移动的调整轮4。
21.所述可滑移从动轮3连接有水平设置的从动轮推杆7,从动轮推杆7内设有伸缩机构,从动轮推杆7一端与机器人主体1连接固定,另一端通过叉臂与从动轮推杆7活动连接;调整轮4连接有内部设有伸缩结构的调整轮推杆8,调整轮推杆8在调整轮4下方垂直设置,调整轮推杆8上方通过叉臂与调整轮4活动连接,下方与机器人主体1连接固定。调整轮推杆8上设有用以实时获得压力数值的压力传感器9。驱动轮2和可滑移从动轮3的外侧设有保护用的外护板5,其中可滑移从动轮3的转轴处设有支撑其转轴的长槽。保证磁吸式履带6始终保持张紧的可滑移从动轮3和调整轮4,通过伸缩联动的从动轮推杆7和调整轮推杆8实现,
当从动轮推杆7伸长则调整轮推杆8匹配缩短,反之从动轮推杆7缩短则调整轮推杆8匹配伸长。
22.当需要增大履带与金属壁面接触长度时,从动轮推杆7伸长,推动可滑移从动轮3沿着外护板5和箱体1上的滑移槽移动,此时作用于调整轮上的压力增大,压力传感器9感知到压力增大后,控制调整轮推杆8使其缩短,从而使履带保持稳定的张紧状态;反之,当需要减小履带与金属壁面接触长度时,从动轮推杆7缩短,调整轮4上压力减小,调整轮推杆8伸长。
23.一种接触长度可调的磁吸式机器人底盘的磁吸式履带调整系统,包括磁吸式履带行走机构底面履带长度调整单元和动力单元,其中:
24.吸式履带行走机构底面履带长度调整单元包括可滑移从动轮位移调整单元、调整轮位置调整单元和压力检测单元,
25.从动轮位移调整单元,用以控制从动轮推杆7伸缩,从而改变可滑移从动轮3与驱动轮2之间的距离从而改变吸式履带行走机构底面履带的长度;
26.调整轮位置调整单元,用以控制调整轮推杆8伸缩,从而改变调整轮4的高度,从而保证磁吸式履带6张紧;
27.压力检测单元,用以根据压力传感器9检测到磁吸式履带6给予调整轮4的压力数据,从而判断出从动轮推杆7当前的伸缩状况,从而帮助调整轮推杆8快速做出匹配的伸缩调整。
技术特征:
1.一种接触长度可调的磁吸式机器人底盘,其特征在于:包括机器人主体(1),机器人主体(1)两侧分别设有用以与金属壁面接触的磁吸式履带行走机构,所述的磁吸式履带行走机构其底部履带长度可调,所述的磁吸式履带行走机构包括三个呈三角分布的动轮,三个动轮之间设有磁吸式履带(6),其中三个动轮包括一个驱动轮(2)以及两个分别能够伸缩,且伸缩状态相反从而保证磁吸式履带(6)始终保持张紧的辅助轮,两个辅助轮包括与驱动轮(2)尺寸相同且水平设置且能够水平移动位置的可滑移从动轮(3),以及设置在驱动轮(2)和可滑移从动轮(3)之间且能够上下移动的调整轮(4)。2.根据权利要求1所述接触长度可调的磁吸式机器人底盘,其特征在于:所述可滑移从动轮(3)连接有水平设置的从动轮推杆(7),从动轮推杆(7)内设有伸缩机构,从动轮推杆(7)一端与机器人主体(1)连接固定,另一端通过叉臂与从动轮推杆(7)活动连接;调整轮(4)连接有内部设有伸缩结构的调整轮推杆(8),调整轮推杆(8)在调整轮(4)下方垂直设置,调整轮推杆(8)上方通过叉臂与调整轮(4)活动连接,下方与机器人主体(1)连接固定。3.根据权利要求1所述接触长度可调的磁吸式机器人底盘,其特征在于:调整轮推杆(8)上设有用以实时获得压力数值的压力传感器(9)。4.根据权利要求1所述接触长度可调的磁吸式机器人底盘,其特征在于:驱动轮(2)和可滑移从动轮(3)的外侧设有保护用的外护板(5),其中可滑移从动轮(3)的转轴处设有支撑其转轴的长槽。5.根据权利要求1所述接触长度可调的磁吸式机器人底盘,其特征在于:保证磁吸式履带(6)始终保持张紧的可滑移从动轮(3)和调整轮(4),通过伸缩联动的从动轮推杆(7)和调整轮推杆(8)实现,当从动轮推杆(7)伸长则调整轮推杆(8)匹配缩短,反之从动轮推杆(7)缩短则调整轮推杆(8)匹配伸长。6.根据权利要求5所述接触长度可调的磁吸式机器人底盘,其特征在于:当需要增大履带与金属壁面接触长度时,从动轮推杆(7)伸长,推动可滑移从动轮(3)沿着外护板(5)和机器人主体(1)上的滑移槽移动,此时作用于调整轮上的压力增大,压力传感器(9)感知到压力增大后,控制调整轮推杆(8)使其缩短,从而使履带保持稳定的张紧状态;反之,当需要减小履带与金属壁面接触长度时,从动轮推杆(7)缩短,调整轮(4)上压力减小,调整轮推杆(8)伸长。7.根据权利要求1所述接触长度可调的磁吸式机器人底盘,其特征在于:包括磁吸式履带行走机构底面履带长度调整单元和动力单元,其中:吸式履带行走机构底面履带长度调整单元包括可滑移从动轮位移调整单元、调整轮位置调整单元和压力检测单元,从动轮位移调整单元,用以控制从动轮推杆(7)伸缩,从而改变可滑移从动轮(3)与驱动轮(2)之间的距离从而改变吸式履带行走机构底面履带的长度;调整轮位置调整单元,用以控制调整轮推杆(8)伸缩,从而改变调整轮(4)的高度,从而保证磁吸式履带(6)张紧;压力检测单元,用以根据压力传感器(9)检测到磁吸式履带(6)给予调整轮(4)的压力数据,从而判断出从动轮推杆(7)当前的伸缩状况,从而帮助调整轮推杆(8)快速做出匹配的伸缩调整。
技术总结
本实用新型公开了一种接触长度可调的磁吸式机器人底盘,适用于特种机器人领域使用,所述的机器人底盘带有两组可调节接触长度的磁吸式履带行走机构,该机构由驱动轮、可滑移从动轮、调整轮、外护板、磁吸式履带、从动轮推杆、调整轮推杆、压力传感器组成;当需要增大吸附力时,从动轮推杆伸长,推动从动轮沿着外护板和箱体上的滑移槽移动,此时作用于调整轮上的压力增大,压力传感器感知到压力增大后,控制调整轮推杆使其缩短,从而使履带保持稳定的张紧状态;反之,当需要减小吸附力时,从动轮推杆缩短,调整轮上压力减小,调整轮推杆伸长,使履带与金属壁面接触长度缩短。其结构简单,使用场景广。用场景广。用场景广。
技术研发人员:李烈 杨道龙 梁森 匡攀倪 张韫琦 沈宛烨
受保护的技术使用者:江苏师范大学
技术研发日:2022.09.21
技术公布日:2023/3/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1