腿部结构及双足机器人的制作方法
本申请属于智能机器人,尤其涉及一种腿部机构及双足机器人。
背景技术:
1、随着科技的进步,各行各业越来越多地应用到了智能机器人,尤其是服务行业对应智能机器人的应用普及率相对更高。以前,智能机器人的形态都相对简单,例如智能机器人的行走系统普遍采用轮式运动系统替代。而现在,智能机器人越来越趋于仿人形设计,因此,双足机器人应运而生。
2、仿人形的双足机器人的任一单腿均应包括髋关节、膝关节、踝关节等相应的腿部关节,各个腿部关节之间相互配合,才能完成和人动作相仿的行走运动。众所周知,在真实的人类的腿部关节中,踝关节所涉及的运动自由度相对于其他腿部关节而言是更加复杂的。而目前的双足机器人,为了能够基本复制人类踝关节的多自由度运动形态,因此踝关节的设计结构十分复杂,虽然基本实现了仿人类踝关节的多自由度运动形态,但是却造成双足机器人的踝关节的体积十分臃肿,与人类踝关节的小巧相去甚远。
技术实现思路
1、本申请的目的在于提供一种腿部结构及双足机器人,旨在解决目前的双足机器人中踝关节的设计结构复杂且体积臃肿的问题。
2、为实现上述目的,本申请采用的技术方案是:一种腿部结构,包括:
3、小腿部;
4、脚掌部;
5、踝连接构件,踝连接构件为十字转接轴,小腿部通过十字转接轴与脚掌部转动连接。
6、在一种实施方式中,小腿部设有相对且间隔的第一连接耳和第二连接耳;脚掌部设有第一连接座,第一连接座包括相对且间隔的第一踝连接耳和第二踝连接耳;踝连接构件设有第一连接头、第二连接头、第三连接头和第四连接头,第一连接头和第二连接头的连线垂直于第三连接头和第四连接头的连线,第一连接头转动连接于第一连接耳,第二连接头转动连接于第二连接耳,第四连接头转动连接于第一踝连接耳,第三连接头转动连接于第二踝连接耳。
7、在一种实施方式中,第一连接头和第一连接耳之间、第二连接头和第二连接耳之间、第四连接头和第一踝连接耳之间、第三连接头和第二踝连接耳之间均是球铰连接;或者,第一连接头和第一连接耳之间、第二连接头和第二连接耳之间、第四连接头和第一踝连接耳之间、第三连接头和第二踝连接耳之间均通过轴承转动连接。
8、在一种实施方式中,十字转接轴为一体成型构件;或者,十字转接轴包括第一横轴件、第二横轴件和纵轴件,第一横轴件的一端和第二横轴件的一端均固定连接于纵轴件且第一横轴件的轴线和第二横轴件的轴线位于同一直线上,第一横轴件的轴线和第二横轴件的轴线均垂直于纵轴件的轴线,纵轴件的两端、第一横轴件的另一端及第二横轴件的另一端分别为第一连接头、第二连接头、第三连接头和第四连接头。
9、在一种实施方式中,踝连接构件还包括固定螺栓,纵轴件设有孔轴线垂直于纵轴件的轴线的穿孔,第一横轴件和第二横轴件分别对应于穿孔的两侧孔端口,固定螺栓依次穿过第一横轴件和穿孔与第二横轴件螺接固定。
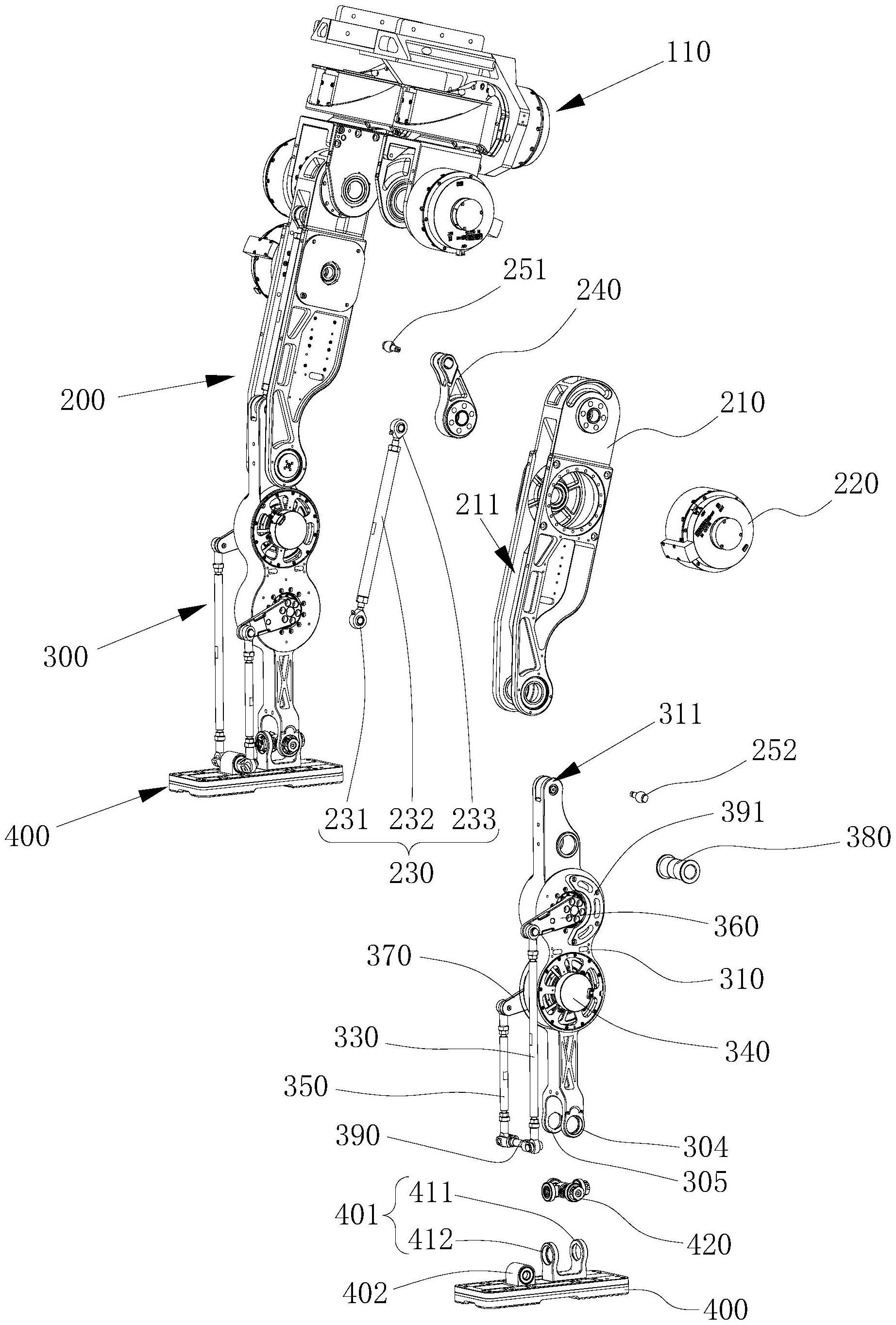
10、在一种实施方式中,脚掌部设有与第一连接座间隔的第二连接座,第二连接座和第一连接座的连线方向为脚掌部的长度方向;小腿部包括:小腿肢干,小腿肢干设有第一连接耳和第二连接耳;第一小腿驱动机构和第二小腿驱动机构,第一小腿驱动机构和第二小腿驱动机构均安装于小腿肢干;第一小腿连杆和第二小腿连杆,第一小腿驱动机构的输出转轴和第一小腿连杆的第一端驱动连接,第一小腿连杆的第二端和第二连接座活动连接,第二小腿驱动机构的输出转轴和第二小腿连杆的第一端驱动连接,第二小腿连杆的第二端和第二连接座活动连接,且第一小腿连杆和第二小腿连杆并列布置。
11、在一种实施方式中,腿部结构还包括枢轴,枢轴转动连接于第二连接座,第一小腿连杆的第二端和枢轴的一端转动连接,第二小腿连杆的第二端和枢轴的另一端转动连接。
12、在一种实施方式中,腿部结构还包括大腿部,大腿部包括:大腿肢干,小腿肢干远离脚掌部的一端转动安装于大腿肢干,小腿肢干靠近大腿肢干的端部设有第一连接端;膝部驱动机构,膝部驱动机构固定安装于大腿肢干远离小腿部的一端;第一膝部连杆和第二膝部连杆,第二膝部连杆的第一端和膝部驱动机构的输出转轴固定连接,第二膝部连杆的第二端和第一膝部连杆的第一端转动连接,第一膝部连杆的第二端和第一连接端转动连接。
13、在一种实施方式中,第一膝部连杆的第二端和第一连接端之间通过第二膝部销轴铰接,第二膝部连杆的第二端和第一膝部连杆的第一端之间通过第一膝部销轴铰接;或者,第一膝部连杆的第二端和第一连接端两者之一设有第二膝部球头,第一膝部连杆的第二端和第一连接端两者之另一设有第二膝部窝槽结构,第二膝部球头铰接于第二膝部窝槽结构,第二膝部连杆的第二端和第一膝部连杆的第一端两者之一设有第一膝部球头,第二膝部连杆的第二端和第一膝部连杆的第一端两者之另一设有第一膝部窝槽结构,第一膝部球头铰接于第一膝部窝槽结构。
14、在一种实施方式中,大腿肢干设有容纳空间,第一膝部连杆和第二膝部连杆均位于容纳空间中,且第一连接端延伸进容纳空间中。
15、本申请至少具有以下有益效果:
16、在本申请提供的双足机器人中,脚掌部和小腿部的端部之间通过踝连接构件装配形成了踝关节,具体的踝连接构件为十字转接轴,通过十字转接轴的四个端部对小腿部和脚掌部进行转接,装配形成的踝关节能够基本实现了仿人类踝关节的最主要的四个自由度运动,基本实现了踝关节的多自由度运动功能。由于采用了十字转接轴形式的踝连接构件的简单结构,能够尽可能地减小踝关节的体积,使得腿部结构的踝关节的体积轮廓形态更趋近于人类踝关节,更加符合人们的审美感官。
技术特征:
1.一种腿部结构,包括:
2.根据权利要求1所述的腿部结构,其特征在于,
3.根据权利要求2所述的腿部结构,其特征在于,
4.根据权利要求2所述的腿部结构,其特征在于,
5.根据权利要求4所述的腿部结构,其特征在于,
6.根据权利要求2-5任一项所述的腿部结构,其特征在于,
7.根据权利要求6所述的腿部结构,其特征在于,
8.根据权利要求1所述的腿部结构,其特征在于,
9.根据权利要求1所述的腿部结构,其特征在于,
10.一种双足机器人,其特征在于,包括如权利要求1-9任一项所述的腿部结构。
技术总结
本申请属于智能机器人技术领域,尤其涉及一种腿部结构及双足机器人。其中,腿部结构,包括:小腿部;脚掌部;踝连接构件,踝连接构件为十字转接轴,小腿部通过十字转接轴与脚掌部转动连接。应用本申请技术方案解决了目前的双足机器人中踝关节的设计结构复杂且体积臃肿的问题。
技术研发人员:盖永记,丁宏钰
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:20221226
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!