用于工业工厂中的物体的运输系统的制作方法
本发明涉及一种在工业工厂中特别用于机动车辆主体的创新的运输系统。
背景技术:
1、在现有技术的工业工厂中通常使用顺序类型的输送机,这些输送机构造有长链段和/或机动辊,在所述机动辊上放置称为“滑架”的合适支撑件并使其移动,所述支撑件又支撑待运输的物体。特别地,滑架在工厂中广泛用于生产机动车辆或机动车辆部件。
2、然而,顺序输送机的缺点是它们只能沿着明确预定的行进路径使用。
3、因此,当输送机上的所有物体的顺序移动必须以同步方式进行时,即,所有物体都向前移动相同量并沿着明确预定的行进路径移动时,这些系统是有用的,例如以便在处理罐、涂漆间等内部的滑架上运输物体。
4、在必须执行更复杂的运输移动的情况下,例如沿着不是严格预定的或者如果需要可以相应容易地改变的行进路径,则改为需要使用更复杂的运输系统,例如具有自主机动化台车(也称为agv(自动化/自动引导车辆))的系统。
5、这些agv运输系统包括一个或多个自动运输台车,所述一个或多个自动运输台车可以借助于轮子在地板表面上移动,并且因此可以程序设计成遵循期望的行进路径。因此,待运输的物体放置在agv台车上,所述agv台车沿着也可能是复杂和/或可变的路径将其运输到目的地。
6、然而,agv系统需要具有用于装载和卸载运输物体的机动化系统的站台,这可能使工厂的管理复杂化。
7、此外,在工厂的一些部分中,agv运输系统可能更合适,并且在同一工厂的其他部分中,滑架式顺序运输系统可能甚至更合适,因此需要在agv台车和顺序运输系统上的滑架之间转移物体。此外,这种转移需要具有用于在两个运输系统之间执行装载和卸载的机动化系统的合适站台。这些站台是复杂的,这也是因为必须在agv台车上的支撑件与存在于滑架上的支撑件之间精确地执行转移。管理这些转移的复杂性使得在现有技术中,优选的是最小化在一个运输系统和另一个运输系统之间执行转移的需要,并且这导致两个运输系统的不同特性的非最佳使用,原因是通常存在限制两个系统的组合使用的趋势,并且优选的是例如在工厂的一部分中不使用两者中最合适的系统,从而不必处理由于在该工厂部分中从一个系统转移到另一个系统而引起的问题。
技术实现思路
1、本发明的总体目的是提供一种运输系统,所述运输系统允许agv型运输系统和滑架系统之间更容易地对接,并且允许更容易地装载和卸载待运输的物体,特别是机动车辆主体。
2、鉴于该目的,根据本发明,已出现的构思是提供一种用于工业工厂的运输系统,所述运输系统包括用于自主运输物体的至少一个台车和用于支撑待运输物体的至少一个滑架以及用于将所述滑架装载到所述台车上和从所述台车卸载所述滑架的至少一个站台,其特征在于,所述台车包括agv型机动化处理平台、机动化提升系统和配备有辊的辊台,所述辊台支撑在所述机动化提升系统上,以便根据命令在所述台车上的升高位置和降低位置之间移动,并且所述辊台用于支撑搁置在所述辊上的滑架。
3、仍然鉴于该目的,已出现的构思是提供一种用于自主运输物体的单个台车,其包括agv型机动化处理平台,其特征在于,其包括在所述机动化平台上方的机动化提升系统和配备有辊的辊台,所述辊台支撑在所述机动化提升系统上,以便根据命令在升高位置和降低位置之间移动,所述辊台用于支撑搁置在所述辊上的滑架并进而支撑待运输的物体,所述辊至少部分地机动化或至少部分地不机动化。
4、根据本发明的agv型自主台车允许在工业工厂中容易地转移滑架,并且还可以容易地与滑架型顺序输送机对接。
技术特征:
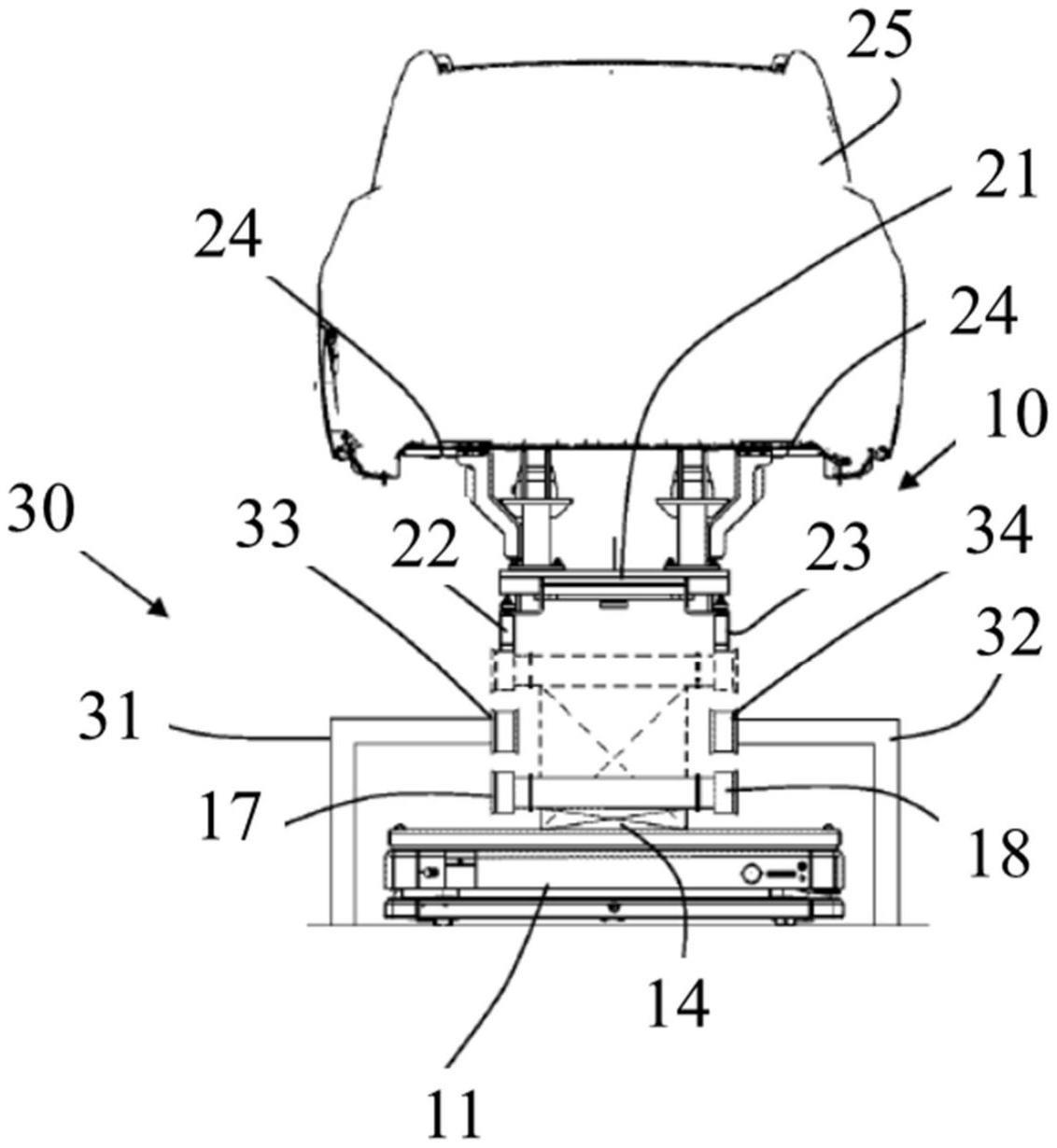
1.一种用于工业工厂的运输系统,所述运输系统包括用于自主运输物体(25)的至少一个台车(10)和用于支撑待运输的物体(25)的至少一个滑架(20)以及用于将所述滑架(20)装载到所述台车上和从所述台车卸载所述滑架的至少一个站台(30),其特征在于,所述台车(10)包括agv型机动化处理平台(11)、机动化提升系统(14)和配备有辊(17、18)的辊台(15),所述辊台(15)支撑在所述机动化提升系统(14)上,以便根据命令在所述台车上的升高位置和降低位置之间移动,并且所述辊台(15)用于支撑搁置在所述辊(17、18)上的滑架(20)。
2.根据权利要求1所述的运输系统,其特征在于,所述台车(10)的所述辊台(15)的所述辊(17、18)布置成从所述辊台的相对侧突出的两个系列。
3.根据权利要求1所述的运输系统,其特征在于,所述台车(10)的所述辊台(15)的所述辊(17、18)中的至少一些是机动化的。
4.根据权利要求1所述的运输系统,其特征在于,所述台车(10)的所述辊台(15)能够根据命令相对于所述机动化平台(11)侧向移位。
5.根据权利要求5所述的运输系统,其特征在于,所述站台(30)包括用于所述滑架的支撑件(31、32),所述台车(30)用于插入所述支撑件之间,以便借助于所述辊台(15)从所述降低位置到所述升高位置的竖直移动从所述支撑件(31、32)拾取所述滑架(20),或者借助于所述辊台(15)从升高的升高位置到所述降低位置的竖直移动将所述滑架(20)放置在所述支撑件(31、32)上。
6.根据权利要求6所述的运输系统,其特征在于,所述支撑件(31、32)用于为所述滑架(20)的滑轨(22、23)提供支撑。
7.根据权利要求4所述的运输系统,其特征在于,所述支撑件(31、32)包括用于滑动支撑所述滑架的辊(33、34)。
8.根据权利要求4所述的运输系统,其特征在于,所述支撑件(31、32)的所述辊(33、34)交替地布置成在所述辊台(15)的升高位置和降低位置之间的移动期间配合到所述站台(30)中的所述台车(10)的所述辊台(15)的所述辊(17、18)之间的空间中。
9.根据权利要求4所述的运输系统,其特征在于,所述运输系统包括至少一个顺序滑架输送机(35),所述顺序滑架输送机在所述站台(30)结束或开始,以便在所述站台中顺序地卸载滑架或从所述站台顺序地拾取滑架。
10.一种用于自主运输物体(25)的台车(10),所述台车包括agv型机动化处理平台(11),其特征在于,所述台车在所述机动化平台(11)上方包括机动化提升系统(14)和配备有辊(17、18)的辊台(15),所述辊台(15)支撑在所述机动化提升系统(14)上,以便根据命令在升高位置和降低位置之间移动,所述辊台(15)用于支撑搁置在所述辊(17、18)上的滑架(20),并且进而支撑待运输的物体(25),所述辊至少部分地被机动化或不被机动化。
11.根据权利要求10所述的台车(10),其特征在于,所述辊(17、18)布置成从所述辊台的两个相对侧突出的两个系列。
12.根据权利要求10所述的台车,其特征在于,所述辊台(15)能根据命令相对于所述机动化平台(11)侧向移位。
13.根据权利要求10所述的台车,其特征在于,所述台车包括止动件(26),以用于受控地锁定放置在所述辊台上的滑架。
技术总结
一种用于工业工厂的运输系统,包括用于自主运输物体(25)的至少一个台车(10)和用于支撑物体(25)的至少一个滑架(20)。台车(10)包括AGV型机动化处理平台(11)、机动化提升系统(14)和配备有辊(17、18)的辊台(15)。辊台(15)支撑在机动化提升系统(14)上以便根据命令在台车上的升高位置和降低位置之间移动,并且辊台(15)用于支撑搁置在待运输的辊(17、18)上的滑架(20)。还可以提供用于将滑架(20)从台车装载和将滑架卸载到台车上的至少一个站台(30)。至少一个顺序输送机可以在末端或起点处设置有装载/卸载站台(30)。
技术研发人员:丹尼尔·拉斯伯恩,瓦莱里奥·伊格里奥
受保护的技术使用者:杰艺科股份公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!